1.本申请涉及机器人的技术领域,尤其是涉及一种电塔攀爬机器人的抓握结构。
背景技术:
2.随着我国高压、特高压输电工程的不断建设,线路检修维护的工作量越来越大,检修工作费时费力。目前,市面上的一些人工智能机器人能够辅助检修人员进行检修工作,以减轻检修人员的工作量,例如携带检修工具或者帮助检修工人放置安全锁具等;但是,机器人在攀爬铁塔过程中,经常由于机械足抓握在铁塔的角钉或者角钢上发生松动,造成机器人掉落的情况发生。
技术实现要素:
3.为了提高机器人攀爬铁塔的稳定性,减少机器人跌落的情况发生,本申请提供一种电塔攀爬机器人的抓握结构。
4.采用如下的技术方案:
5.一种电塔攀爬机器人的抓握结构,安装在机器人的机械足端部,用于抓握在电塔的角钢上;所述抓握结构包括肋板、蝴蝶板以及电磁铁;所述肋板连接于机器人的足端处;所述肋板的两侧分别与蝴蝶板铰接,所述电磁铁设置于蝴蝶板上,所述肋板两侧蝴蝶板上的电磁铁用于吸附在角钢的两个角壁上;所述蝴蝶板沿肋板长度方向间隔设置;所述电磁铁通电时消磁,断电时具有磁性;每一对位于肋板两侧的蝴蝶板之间设置有弹簧,所述弹簧用于控制电磁铁消磁后两个蝴蝶板之间的夹角。
6.可选的,所述肋板与蝴蝶板上均设置有弹簧安装块,其中位于肋板上的弹簧安装块开设有通孔,用于供弹簧穿过通孔;弹簧的两端对应连接于两侧蝴蝶板上的弹簧安装块。
7.可选的,所述蝴蝶板背离电磁铁的一侧壁开设有沉头槽。
8.可选的,所述沉头槽底部贯穿开设有连接孔,所述磁铁通过连接螺柱穿过连接孔后连接在蝴蝶板背离沉头槽的一侧壁上。
9.可选的,所述肋板沿其长度方向间隔开设有安装孔,通过连接螺栓固定在机械足的端部。
10.可选的,所述电磁铁表面设置有橡胶薄膜套。
11.综上所述,本申请包括以下有益效果:
12.1.在机械足端部安装抓握结构,通过肋板两侧蝴蝶板上的电磁铁牢牢吸附在角钢上,有效提高机械足抓握在角钢上的稳定性,减少机器人掉落的情况发生;
13.2.通过沉头槽的开设,能够有效减轻蝴蝶板的重量;
14.3.电磁铁表面设置橡胶薄膜套,能够增加电磁铁与角钢之间的摩擦力,提高抓握稳定性。
附图说明
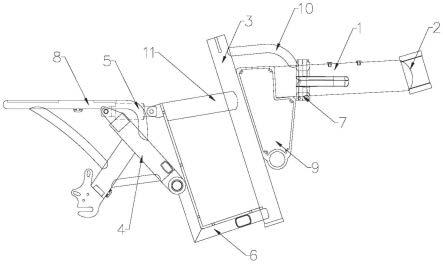
15.图1是本实施例中机械足与抓握结构的示意图;
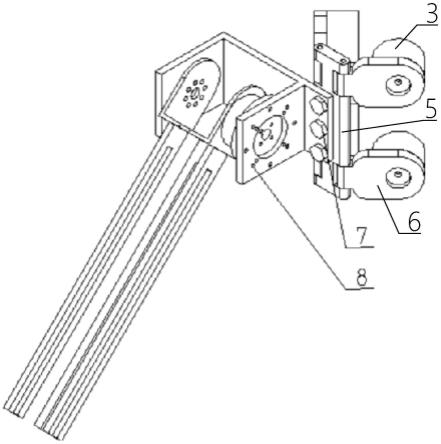
16.图2是本实施例中抓握结构与角钢的示意图;
17.图3是本实施例中蝴蝶板与肋板平行时的俯视图;
18.图4是本实施例中蝴蝶板与肋板平行时的仰视图;
19.图5是本实施例中肋板的示意图;
20.图6是本实施例中蝴蝶板的示意图;
21.图7是本实施例中蝴蝶板另一视角的示意图。
22.附图标记说明:1、角钉;2、角钢;3、电磁铁;4、连接螺柱;5、肋板;6、蝴蝶板;7、连接螺栓;8、机械足;9、弹簧安装块;10、安装孔;11、弹簧;12、沉头槽;13、连接孔。
具体实施方式
23.以下结合附图对本申请作进一步详细说明。
24.本申请实施例公开一种电塔攀爬机器人的抓握结构,安装在机器人的机械足8端部,用于抓握在电塔的角钢2上。
25.抓握结构包括肋板5、蝴蝶板6以及电磁铁3。肋板5连接于机器人的足端处。肋板5的两侧分别与蝴蝶板6铰接,电磁铁3设置于蝴蝶板6上,肋板5两侧蝴蝶板6上的电磁铁3用于吸附在角钢2的两个角壁上。蝴蝶板6沿肋板5长度方向间隔设置。电磁铁3采用通电消磁型磁铁,即电磁铁3通电时消磁,断电时具有磁性。每一对位于肋板5两侧的蝴蝶板6之间设置有弹簧11,弹簧11用于控制电磁铁3消磁后两个蝴蝶板6之间的夹角。
26.具体的,在本实施例中,蝴蝶板6分布在肋板5长度方向的两端,设置有两对。蝴蝶板6与肋板5上均安装有弹簧安装块9,其中,位于肋板5上的弹簧安装块9开设有通孔。弹簧11穿过位于肋板5上的通孔后,弹簧11的两端对应连接在蝴蝶板6上的弹簧安装块9。根据实际工况,选择不同长度以及胡克系数的弹簧11,确保电磁铁3在断电前,保持与角钢2侧壁表面接近平行状态,从而确保电磁铁3在断电后能够牢牢吸附在角钢2上。为了满足不同的负重需求,可配备多种不同功率的电磁铁3。
27.进一步的,蝴蝶板6的背离电磁铁3的侧壁上开设有沉头槽12,能够减轻蝴蝶板6的重量。沉头槽12底部贯穿开设有连接孔13,电磁铁3通过连接螺柱4穿过连接孔13后连接在蝴蝶板6远离沉头槽12的一侧壁上。电磁铁3表面固定安装有橡胶薄膜套,以增大电磁铁3与角钢2之间的摩擦系数,增强抓握稳定性。肋板5沿其长度方向间隔开设有三个安装孔10,通过连接螺栓7固定在机械足8的端部。
28.抓握结构安装在机器人的机械足8端部。机器人上具有蓄电池、上位机、plc控制器、接触器。由蓄电池给电磁铁3供电,上位机控制plc控制器,plc控制接触器,接触器连接在蓄电池与电磁铁3回路中。待机器人调整好姿态后落足于角钢2上,上位机发送断电指令,机械足端部上安装的电磁铁3即可牢牢吸附于角钢2上。
29.其中,各个蝴蝶板6不会相互约束,能使每个蝴蝶板6上的电磁铁3紧密贴合在角钢2表面,提供强大的吸附力,保证机械足8与角钢2之间的连接稳定;在控制上操作简便,仅通过接触器通断电来实现电磁铁3的松开或吸附,可大幅提高机器人的负载并大幅降低机器人的控制难度。
30.以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。
技术特征:
1.一种电塔攀爬机器人的抓握结构,安装在机器人的机械足端部,用于抓握在电塔的角钢上;其特征在于:所述抓握结构包括肋板、蝴蝶板以及电磁铁;所述肋板连接于机器人的足端处;所述肋板的两侧分别与蝴蝶板铰接,所述电磁铁设置于蝴蝶板上,所述肋板两侧蝴蝶板上的电磁铁用于吸附在角钢的两个角壁上;所述蝴蝶板沿肋板长度方向间隔设置;所述电磁铁通电时消磁,断电时具有磁性;每一对位于肋板两侧的蝴蝶板之间设置有弹簧,所述弹簧用于控制电磁铁消磁后两个蝴蝶板之间的夹角。2.根据权利要求1所述的一种电塔攀爬机器人的抓握结构,其特征在于:所述肋板与蝴蝶板上均设置有弹簧安装块,其中位于肋板上的弹簧安装块开设有通孔,用于供弹簧穿过通孔;弹簧的两端对应连接于两侧蝴蝶板上的弹簧安装块。3.根据权利要求1所述的一种电塔攀爬机器人的抓握结构,其特征在于:所述蝴蝶板背离电磁铁的一侧壁开设有沉头槽。4.根据权利要求3所述的一种电塔攀爬机器人的抓握结构,其特征在于:所述沉头槽底部贯穿开设有连接孔,所述磁铁通过连接螺柱穿过连接孔后连接在蝴蝶板背离沉头槽的一侧壁上。5.根据权利要求1所述的一种电塔攀爬机器人的抓握结构,其特征在于:所述肋板沿其长度方向间隔开设有安装孔,通过连接螺栓固定在机械足的端部。6.根据权利要求1所述的一种电塔攀爬机器人的抓握结构,其特征在于:所述电磁铁表面设置有橡胶薄膜套。
技术总结
本申请公开了一种电塔攀爬机器人的抓握结构,涉及机器人的技术领域,抓握结构安装在机器人的机械足端部,用于抓握在电塔的角钢上;抓握结构包括肋板、蝴蝶板以及电磁铁;肋板连接于机器人的足端处;肋板的两侧分别与蝴蝶板铰接,电磁铁设置于蝴蝶板上,肋板两侧蝴蝶板上的电磁铁用于吸附在角钢的两个角壁上;蝴蝶板沿肋板长度方向间隔设置;电磁铁通电时消磁,断电时具有磁性;每一对位于肋板两侧的蝴蝶板之间设置有弹簧,弹簧用于控制电磁铁消磁后两个蝴蝶板之间的夹角。本申请能够提高机器人与角钢之间的抓握稳定性,减少机器人掉落的情况发生。情况发生。情况发生。
技术研发人员:汤海彬 刘红生
受保护的技术使用者:华侨大学
技术研发日:2022.10.18
技术公布日:2023/2/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。