1.本发明涉及心血管介入治疗领域,尤其涉及一种介入导管限位输送辅助设备。
背景技术:
2.血管介入式手术是借助于介入导管通过血管管腔到达体内较远的病变部位,然后对体内较远部位实现微创治疗的一种新兴医疗技术,由于人体血管弯曲和不规则性,许多部位的血管存在分支,特别是毫米级的血管较多,这些原因使得插管过程变得极其困难,在手术插管过程中,如果介入导管与血管壁发生抵触,则可能导致血管壁出现夹层,危害病人生命,故而现在的导管前端安装有微型触力传感器,可以在导管前进时将阻力反馈回操作手柄上,从而让医生在手术时能切实地感受到导管输送过程中所受到的阻力,避免因推力过大而对血管造成损害,然而,现有的微型触力传感器多安装在导管前端,仅能反馈导管前端所受触力,而现有介入导管根据需求多弯曲设置,弯曲的导管在分支较多的血管内行进时,弯曲段同样要遭受阻力,而这些阻力,医护人员在操作时难以感受,导致存在对血管造成损伤的风险,针对现有问题,提出一种介入导管限位输送辅助设备。
技术实现要素:
3.本发明的目的是为了解决现有技术中存在仅能反馈导管前端所受触力的缺点,而提出的一种介入导管限位输送辅助设备。
4.为了实现上述目的,本发明采用了如下技术方案:
5.设计一种介入导管限位输送辅助设备,包括安装筒体及输送机构,所述输送机构设置在所述安装筒体上,所述输送机构包括主输送机构、从动轮、第一电机,所述安装筒体两侧开设有矩形槽,所述矩形槽外侧固定安装有护板,所述主输送机构及所述从动轮分别转动安装在两侧的所述护板中间,所述主输送机构包括主动轮、抵触机构、压力传感器,所述主动轮转动安装在一侧的所述护板中间,所述主动轮外圆壁上圆周阵列开设有活动槽,所述抵触机构一端铰接安装在所述活动槽内,所述压力传感器固定安装在每个所述活动槽一侧,所述第一电机固定安装在所述护板外侧且输出轴贯穿所述护板与所述主动轮固定连接。
6.优选的,所述抵触机构包括铰接板、滑套、抵触条、拉伸弹簧,所述铰接板一端铰接设置在所述活动槽内,所述滑套滑动套设在所述铰接板另一端,所述抵触条固定安装在所述滑套外端,所述抵触条为柔性材质,所述拉伸弹簧间隔设置在所述滑套内,所述拉伸弹簧一端与所述铰接板固定连接且另一端与所述抵触条固定连接。
7.优选的,所述从动轮及所述主动轮外圆壁上均开设有容纳凹槽。
8.优选的,还包括安装机构,所述安装机构包括两个固定条、安装架,两个所述固定条对称间隔设置,所述安装架固定安装在所述固定条上,所述安装架上对应所述安装筒体开设有通孔,所述安装筒体下端设置有铰接架,所述铰接架一侧与所述安装架铰接连接,所述铰接架与所述安装筒体下端转动连接。
9.优选的,还包括偏转机构,所述偏转机构包括第二电机、不完全齿环、齿轮,所述第二电机固定安装在所述铰接架上表面,所述不完全齿环固定安装在所述安装筒体外侧,所述齿轮固定安装在所述第二电机输出轴且与所述不完全齿环啮合传动连接。
10.优选的,还包括贴合限位机构,所述贴合限位机构包括柔性软板、拼接块,所述柔性软板设置在所述固定条下方且与所述固定条固定连接,所述拼接块阵列固定安装在所述柔性软板下表面,所述柔性软板中间对应所述安装架上的通孔开设有操作口,所述操作口贯穿所述拼接块。
11.优选的,所述安装架两侧下方固定安装有连接套,所述连接套下端与所述柔性软板固定连接,所述连接套可伸缩。
12.优选的,还包括约束机构,所述约束机构包括两个约束绳,两个所述约束绳对称设置在所述拼接块两端,每个所述拼接块两端两侧均开设有圆槽,所述约束绳通过所述圆槽贯穿所述拼接块。
13.优选的,所述约束绳两端均固定安装有螺杆,所述螺杆上螺纹套设有螺纹端套。
14.优选的,两个所述约束绳一端的所述螺纹端套外端转动安装有卡扣,两个所述约束绳另一端的所述螺纹端套外端转动安装有连接扣,所述卡扣与所述连接扣卡扣连接。
15.本发明提出的一种介入导管限位输送辅助设备,有益效果在于:
16.1、通过安装筒体、输送机构、铰接架、安装机构的配合,医护人员在使用时,可以根据实际情况,确定导管介入位置,并对导管进行输送,在输送介入导管时,可实时监测介入导管在血管内前进阻力,避免常规介入导管仅在前端设置压力感应机构而无法监测弯曲段与血管内壁的抵触压力,同时设置抵触机构,能够适应不同直径的介入导管进行输送。
17.2、通过设置偏转机构,能够适应手术过程中的内窥镜或者介入导管前端弯曲段在血管分支处的旋转需求,同时也便于操作,转动角度精准可控。
18.3、通过设置贴合限位机构、约束机构,由于手术过程中,介入导管插入位置会选择桡动脉,少部分会选择股动脉、尺动脉、肱动脉,而不同的动脉对应身体不同位置,而通过贴合限位机构、约束机构能够将装置贴合在人体四肢并进行固定,便于后续的插管操作,减少介入导管移动幅度,减少对人体的伤害。
附图说明
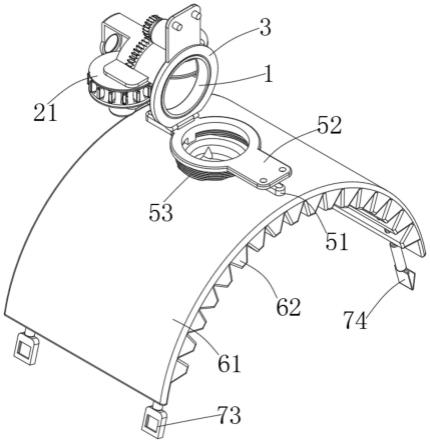
19.图1为本发明提出的一种介入导管限位输送辅助设备的侧视结构示意图。
20.图2为本发明提出的一种介入导管限位输送辅助设备的仰视结构示意图。
21.图3为本发明提出的一种介入导管限位输送辅助设备的剖面结构示意图。
22.图4为本发明提出的一种介入导管限位输送辅助设备的侧视结构示意图。
23.图5为本发明提出的一种介入导管限位输送辅助设备的部分机构结构示意图。
24.图6为本发明提出的一种介入导管限位输送辅助设备的主输送机构结构示意图。
25.图7为本发明提出的一种介入导管限位输送辅助设备的抵触机构结构示意图。
26.图中:安装筒体1、护板11、顶架12、约束环13、输送机构2、主输送机构21、主动轮211、活动槽212、抵触机构213、铰接板2131、滑套2132、抵触条2133、拉伸弹簧2134、压力传感器214、从动轮22、容纳凹槽221、第一电机23、铰接架3、偏转机构4、第二电机41、不完全齿环42、齿轮43、安装机构5、固定条51、安装架52、连接套53、贴合限位机构6、柔性软板61、拼
接块62、圆槽621、操作口63、约束机构7、约束绳71、螺纹端套72、卡扣73、连接扣74。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
28.实施例1
29.参照图1-7,一种介入导管限位输送辅助设备,包括安装筒体1及输送机构2,输送机构2设置在安装筒体1上,输送机构2包括主输送机构21、从动轮22、第一电机23,安装筒体1两侧开设有矩形槽,矩形槽外侧固定安装有护板11,主输送机构21及从动轮22分别转动安装在两侧的护板11中间,主输送机构21包括主动轮211、抵触机构213、压力传感器214,主动轮211转动安装在一侧的护板11中间,从动轮22及主动轮211外圆壁上均开设有容纳凹槽221,设置容纳凹槽221,可以有效对介入导管进行限位,避免在输送介入导管时,介入导管偏移导致的脱落,影响手术进行,主动轮211外圆壁上圆周阵列开设有活动槽212,抵触机构213一端铰接安装在活动槽212内,压力传感器214固定安装在每个活动槽212一侧,压力传感器214为微型触力传感器,能够较为精准的检测出导管所受阻力,第一电机23固定安装在护板11外侧且输出轴贯穿护板11与主动轮211固定连接,安装筒体1上端两侧固定安装有顶架12,顶架12上端中间固定设置有约束环13,在介入导管插入时,先将介入导管穿过约束环13向下插入主输送机构21及从动轮22中间,此时第一电机23驱动主动轮211转动,抵触机构213与介入导管接触产生摩擦力,而在活动槽212内移动的抵触机构213受与介入导管接触产生的摩擦阻力而抵触压力传感器214,从而能够实时检测出当前介入导管在行进过程中的阻力变化,便于医护人员即使调整。
30.抵触机构213包括铰接板2131、滑套2132、抵触条2133、拉伸弹簧2134,铰接板2131一端铰接设置在活动槽212内,滑套2132滑动套设在铰接板2131另一端,抵触条2133固定安装在滑套2132外端,抵触条2133为柔性材质,拉伸弹簧2134间隔设置在滑套2132内,拉伸弹簧2134一端与铰接板2131固定连接且另一端与抵触条2133固定连接,抵触条2133为硅胶柔性材质,与介入导管接触时,一方面能够增大摩擦力,另一方面能够有效避免对介入导管造成损坏,拉伸弹簧2134对滑套2132、抵触条2133施加一个向外的弹力,当抵触条2133与介入导管抵触时,挤压滑套2132滑动,压缩拉伸弹簧2134,从而实现适应不同管径的介入导管的输送。
31.还包括安装机构5,安装机构5包括两个固定条51、安装架52,两个固定条51对称间隔设置,安装架52固定安装在固定条51上,安装架52上对应安装筒体1开设有通孔,安装筒体1下端设置有铰接架3,铰接架3一侧与安装架52铰接连接,铰接架3与安装筒体1下端转动连接,当前的导管插管动作,普遍方法是技术熟练的操作人员在x光或其它灰度图像的引导下手工完成,首先将导丝远端插入人体血管,并在x光图像的引导下使其到达目标位置,接着将导管沿着导丝送到特定的位置,抽出导丝,到此即完成一次手术导管的插管过程,设置安装机构5,便于在插管位置确定及前期操作后,直接将铰接架3带动安装筒体1及输送机构2翻转至安装架52上,同时安装架52及铰接架3上对应开设有螺纹孔,可通过螺栓螺纹连接固定,然后便于后续的插管操作。
32.通过安装筒体1、输送机构2、铰接架3、安装机构5的配合,医护人员在使用时,可以
根据实际情况,确定导管介入位置,并对导管进行输送,在输送介入导管时,可实时监测介入导管在血管内前进阻力,避免常规介入导管仅在前端设置压力感应机构而无法监测弯曲段与血管内壁的抵触压力,同时设置抵触机构213,能够适应不同直径的介入导管进行输送。
33.实施例2
34.根据实施例1,实施例1中医护人员在使用时,可以根据实际情况,确定导管介入位置,并对导管进行输送,在输送介入导管时,可实时监测介入导管在血管内前进阻力,避免常规介入导管仅在前端设置压力感应机构而无法监测弯曲段与血管内壁的抵触压力,同时设置抵触机构213,能够适应不同直径的介入导管进行输送,然而,介入导管在血管内行进时,遇到血管分支,有时就需要将介入导管转动一定角度以便继续行进,参照图1-7,作为本发明的另一优选实施例,在实施例1的基础上,还包括偏转机构4。
35.偏转机构4包括第二电机41、不完全齿环42、齿轮43,第二电机41固定安装在铰接架3上表面,第二电机41为伺服电机,便于精准控制安装筒体1偏转角度,不完全齿环42固定安装在安装筒体1外侧,齿轮43固定安装在第二电机41输出轴且与不完全齿环42啮合传动连接,当需要控制介入导管转动时,由于输送机构21、从动轮22对介入导管的挤压限位作用,当控制第二电机41启动时,通过不完全齿环42、齿轮43的啮合传动,带动安装筒体1偏转一定角度,实现对介入导管的转动控制。
36.通过设置偏转机构4,能够适应手术过程中的内窥镜或者介入导管前端弯曲段在血管分支处的旋转需求,同时也便于操作,转动角度精准可控。
37.实施例3
38.根据实施例2,实施例2中医护人员在使用时,可以根据实际情况,确定导管介入位置,并对导管进行输送,在输送介入导管时,可实时监测介入导管在血管内前进阻力,避免常规介入导管仅在前端设置压力感应机构而无法监测弯曲段与血管内壁的抵触压力,同时设置抵触机构213,能够适应不同直径的介入导管进行输送,同时可控制介入导管偏转,然而,由于介入导管插入位置不一,难以在体表对介入导管进行限位,而现有技术中的加入导管输送装置则与人体有一定位置,在介入导管插入时,未限位的介入导管易活动对人体造成一定损伤,参照图1-7,作为本发明的另一优选实施例,在实施例2的基础上,还包括贴合限位机构6及约束机构7。
39.贴合限位机构6包括柔性软板61、拼接块62,柔性软板61设置在固定条51下方且与固定条51固定连接,拼接块62阵列固定安装在柔性软板61下表面,拼接块62为柔性材质块,柔性软板61中间对应安装架52上的通孔开设有操作口63,操作口63贯穿拼接块62,安装架52两侧下方固定安装有连接套53,连接套53下端与柔性软板61固定连接,连接套53可伸缩,约束机构7包括两个约束绳71,两个约束绳71对称设置在拼接块62两端,每个拼接块62两端两侧均开设有圆槽621,约束绳71通过圆槽621贯穿拼接块62,约束绳71两端均固定安装有螺杆,螺杆上螺纹套设有螺纹端套72,两个约束绳71一端的螺纹端套72外端转动安装有卡扣73,两个约束绳71另一端的所述螺纹端套72外端转动安装有连接扣74,卡扣73与连接扣74卡扣连接,在使用时,先将柔性软板61、拼接块62铺设在人体上,并将操作口63对准介入导管插管处,然后根据插管实际位置(如手臂、大腿等),转动螺纹端套72,此时螺纹端套72与拼接块62抵触,在螺纹端套72转动过程中,暴露的约束绳71逐渐缩短,使得柔性软板61、
拼接块62逐渐弯曲与人体表面贴合,从而可以包裹人体手臂或者大腿,然后将连接扣74对应插设在卡扣73内以进行卡扣连接,实现限位固定,便于后续插管操作。
40.通过设置贴合限位机构6、约束机构7,由于手术过程中,介入导管插入位置会选择桡动脉,少部分会选择股动脉、尺动脉、肱动脉,而不同的动脉对应身体不同位置,而通过贴合限位机构6、约束机构7能够将装置贴合在人体四肢并进行固定,便于后续的插管操作,减少介入导管移动幅度,减少对人体的伤害。
41.工作原理:在使用时,先将柔性软板61、拼接块62铺设在人体上,并将操作口63对准介入导管插管处,然后根据插管实际位置(如手臂、大腿等),转动螺纹端套72,此时螺纹端套72与拼接块62抵触,在螺纹端套72转动过程中,暴露的约束绳71逐渐缩短,使得柔性软板61、拼接块62逐渐弯曲与人体表面贴合,从而可以包裹人体手臂或者大腿,实现限位固定,便于在插管位置确定及前期操作后,直接将铰接架3带动安装筒体1及输送机构2翻转至安装架52上,同时安装架52及铰接架3上对应开设有螺纹孔,可通过螺栓螺纹连接固定,然后便于后续的插管操作,在介入导管插入时,先将介入导管穿过约束环13向下插入主输送机构21及从动轮22中间,此时第一电机23驱动主动轮211转动,抵触机构213与介入导管接触产生摩擦力,而在活动槽212内移动的抵触机构213受与介入导管接触产生的摩擦阻力而抵触压力传感器214,从而能够实时检测出当前介入导管在行进过程中的阻力变化,便于医护人员即使调整,拉伸弹簧2134对滑套2132、抵触条2133施加一个向外的弹力,当抵触条2133与介入导管抵触时,挤压滑套2132滑动,压缩拉伸弹簧2134,从而实现适应不同管径的介入导管的输送,当需要控制介入导管转动时,由于输送机构21、从动轮22对介入导管的挤压限位作用,当控制第二电机41启动时,通过不完全齿环42、齿轮43的啮合传动,带动安装筒体1偏转一定角度,实现对介入导管的转动控制。
42.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。