1.本发明涉及可穿戴设备技术领域,特别涉及一种智能眼镜。
背景技术:
2.智能眼镜作为可穿戴电子设备之一,能够提供例如音乐、显示等相关功能,在满足人们生活享受的同时,给用户带来了极大的生活便利,因此备受用户喜爱。
3.在相关技术中,智能眼镜通过按键或者触控面板实现控制指令的输入,这种操作方式使得用户在使用智能眼镜时,需要进行额外的按压操作或触摸操作,导致智能眼镜的指令输入繁琐,不够简捷。
技术实现要素:
4.发明的主要目的是提出一种智能眼镜,旨在提高智能眼镜控制方式的简捷性。
5.为实现上述目的,本发明提出的智能眼镜,包括眼镜架、触发模块和处理器,其中,
6.所述眼镜架,所述眼镜架包括镜框和镜腿,所述镜腿设有两只,两只所述镜腿分别转动连接于所述镜框的两侧,所述镜腿具有打开状态和折叠状态
7.所述触发模块包括霍尔传感器和磁体,所述霍尔传感器和所述磁体分别设于两只所述镜腿,所述霍尔传感器和所述磁体可随所述镜腿的折叠和打开而靠近和远离,所述霍尔传感器可根据与所述磁体的距离变化生成触发信号;
8.所述处理器设于所述眼镜架,所述处理器与触发模块电连接,所述触发模块用于根据所述触发信号、执行相应的控制指令。
9.可选地,所述触发信号包括第一触发信号和第二触发信号;
10.所述控制指令包括第一控制指令和第二控制指令;其中,
11.当两只所述镜腿均处于折叠状态时,所述霍尔传感器与所述磁体的位置相对,且所述霍尔传感器生成第一触发信号,所述处理器在收到所述第一触发信号时,执行第一控制指令;
12.当至少一只所述镜腿处于打开状态时,所述霍尔传感器生成第二触发信号,所述处理器在收到所述第二触发信号时,执行第二控制指令。
13.可选地,所述霍尔传感器为单极性霍尔传感器。
14.可选地,所述镜腿具有层叠区域,当两只所述镜腿均处于折叠状态时,两只所述镜腿上的层叠区域相互层叠,所述霍尔传感器和所述磁体设于所述层叠区域。
15.可选地,所述霍尔传感器靠近所述镜腿的内侧壁设置;和/或
16.所述磁体靠近所述镜腿的内侧壁设置。
17.可选地,两只所述镜腿中空形成有安装腔,所述霍尔传感器设于一所述镜腿的安装腔中,并设置于所述安装腔朝向所述镜腿内侧的腔壁;
18.所述磁体设于另一所述镜腿的安装腔中,并设置于所述安装腔朝向所述镜腿内侧的侧壁。
19.可选地,所述智能眼镜还包括主控板,所述处理器设于所述主控板;
20.所述镜腿均设有容纳腔,所述容纳腔与所述安装腔连通,所述主控板设于所述容纳腔内;
21.所述智能眼镜还包括电连接线,所述电连接线的一端与所述霍尔传感器连接、另一端与所述主动板电连接。
22.可选地,所述智能眼镜包括两个所述处理器及两组智所述触发模块,其中,
23.两个所述处理器分别设于两个所述镜腿;
24.两组所述触发模块的霍尔传感器和磁体分别设于两只所述镜腿,且一只所述镜腿上设有一组所述触发模块的霍尔传感器、以及另一组所述触发模块的磁体,一所述镜腿上的霍尔传感器与磁体在所述镜腿的延伸方向上间隔设置,
25.两个所述镜腿上的霍尔传感器分别与两个所述镜腿上的处理器电连接。
26.可选地,所述第一控制指令包括关机指令,所述第二控制指令包括开机指令;或
27.所述第一控制指令包括休眠指令,所述第二控制指令包括唤醒指令。
28.可选地,所述处理器用于在收到所述第一触发信号的第一预设时长后,执行所述第一控制指令;以及
29.在收到所述第二信号的第二预设时长后,执行所述第二控制指令。
30.本发明技术方案通过将同一触发模块霍尔传感器和磁体分别设有两只镜腿上,这样,霍尔传感器便可根据镜腿的打开和/或折叠向处理器发送相应的触发信号,处理器在接收到该触发信号后便可执行相应的控制指令,如此,在实际使用时,用户仅通过打开镜腿和/或折叠镜腿便可完成特定的控制指令的输入,从而极大地简化了用户的操作方式,提升了用户的使用体验。可见,相较于传统的触控或按压控制的智能眼镜而言,本技术的智能眼镜具有操作便捷的优点。
附图说明
31.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
32.图1为本发明智能眼镜镜腿打开状态一实施例的结构示意图;
33.图2为图1中智能眼镜一镜腿的爆炸图;
34.图3为图1中智能眼镜另一镜腿的爆炸图;
35.图4为本发明智能眼镜镜腿折叠状态一实施例的结构示意图;
36.图5为图4中智能眼镜层叠区域的结构示意图;
37.图6为图4中智能眼镜两只镜腿的爆炸图。
38.附图标号说明:
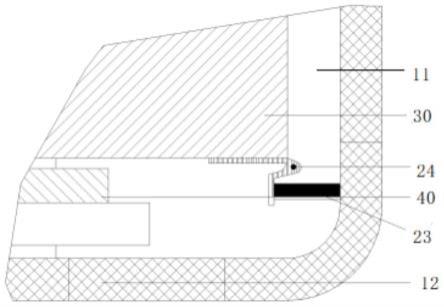
39.10、镜框;11、镜片;20、镜腿;21、层叠区域;22、安装腔;23、容纳腔;30、触发模块;31、霍尔传感器;32、磁体;40、处理器;50、电池;60、主控板;70、通信模块、80、发声模块;81、扬声器;90、电连接线
40.本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
41.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
42.需要说明,若本发明实施例中有涉及方向性指示(诸如上、下、左、右、前、后
……
),则该方向性指示仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
43.另外,若本发明实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,全文中出现的“和/或”的含义为,包括三个并列的方案,以“a和/或b”为例,包括a方案,或b方案,或a和b同时满足的方案。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
44.本发明提出一种智能眼镜。
45.在本发明实施例中,如图1至图6所示,该智能眼镜包括眼镜架、触发模块30和处理器40。
46.其中,眼镜架包括镜框10和镜腿20,该镜框10上形成有镜片安装口(图片未标示),在镜片安装口用以供镜片11安装。在本实施例中,该镜框10上形成有两个镜片安装口,两个镜片安装口中均安装有镜片11,根据用户需求,该镜片11可以设置为平光镜片、屈光镜片、太阳镜片等。当然,在一些实施例中,镜框10上也可不安装镜片11。在另一些实施例中,镜框10上也可仅设置一个镜片安装口,即是说,眼镜被设置为单片眼镜。
47.进一步地,镜腿20设有两只,两只镜腿20分别转动连接于镜框10的两侧。具体地,镜腿20具有打开状态和折叠状态,具体为,当镜腿20与镜框10之间的夹角大致为90度时,我们认为此时的镜腿20处于打开状态,相应的,当镜腿20与镜框10基本平行(或镜腿20收叠于镜框10上)时,我们认为此时的镜腿20处于折叠状态。值得说明的是,每一只镜腿20均具有打开状态和折叠状态,且两只镜腿20的状态相互独立,互不干涉。即是说,可以是一只镜腿20处于打开状态、另一只镜腿20处于折叠状态,也可是两只镜腿20均处于打开状态或折叠状态。
48.进一步地,触发模块30包括霍尔传感器31和磁体32,该霍尔传感器31和磁体32分别设于两只镜腿20,该霍尔传感器31和磁体32可随镜腿20的折叠和打开而靠近和远离,该霍尔传感器31可根据与磁体32的距离变化生成触发信号。
49.这其中,霍尔传感器31是指根据霍尔效应制作的一种磁场感应器,磁体32是指能够提供磁场的物体,该磁体32的材质包括但不限于钐钴磁体、钕铁硼磁铁、铁氧体磁铁、铝镍钴磁铁、铁铬钴磁铁等。
50.具体地,由于霍尔传感器31具有霍尔效应,因此霍尔传感器31能够根据磁体32的靠近和远离,输出不同的电平信号。由于距离磁体32的磁极越近,磁体32的磁场强度越强,距离磁体32的磁极越远,磁体32的磁场强度越弱,如此,可通过改变霍尔传感器31与磁体32
磁极的距离,使得霍尔传感器31能够检测到不同强度的磁场强度,以输出不同的电平信号。
51.进一步地,处理器40设于眼镜架,该处理器40与触发模块30电连接,该处理器40为智能眼镜的数据处理模块,其可以为cpu(central processing unit,中央处理器),也可以为mcu(microcontroller unit,微控制单元)等。该处理器40用于根据触发信号、执行相应的控制指令。具体为,处理器40根据霍尔传感器31输出不同的电平信号,执行不同电平信号所对应的控制指令。
52.示例性的,在本技术技术方案的一些实施例中,我们在处理器40中嵌入了智能眼镜的开机指令,并将开机指令与镜腿打开时霍尔传感器的生成的触发信号关联。这样,当用户打开镜腿时,处理器便能够根据霍尔传感器所传输的指令实现的智能眼镜的开机。
53.再示例性的,我们在处理器40中嵌入了智能眼镜的关机指令,并将关机指令与镜腿20打开时霍尔传感器31的生成的触发信号关联。这样,当用户打开镜腿20时,处理器40便能够根据霍尔传感器31所传输的指令实现的智能眼镜的关机。
54.再示例性的,我们在处理器40中嵌入了智能眼镜的开关机指令,并将开机指令与镜腿20打开时霍尔传感器31的生成的触发信号关联,同时,将关机指令与按压按键生成的触发信号关联,亦或是将关机指令与接触触摸面板生成的触发信号关联,如此,在用户打开镜腿20时,处理器40便能够根据霍尔传感器31所传输的指令实现的智能眼镜的开机,在用户按压按键,或者接触触摸面板时,处理器40便能执行对应的关机指令,当然,在其他实施例中,也可以将关机指令与遮盖光电传感器生成的触发信号关联,在用户遮盖光电传感器时,处理器40便能执行对应的关机指令。值得说明地说,本技术的设计不限于此,智能眼镜的控制智能包括但不限于开关机指令,还可以是蓝牙的断开连接,音乐的播放、暂停和换曲等。
55.可以理解,本技术技术方的智能眼镜,通过将同一触发模块30的霍尔传感器31和磁体32分别设有两只镜腿20上,这样,霍尔传感器31便可根据镜腿20的打开和/或折叠向处理器40发送相应的触发信号,处理器40在接收到该触发信号后便可执行相应的控制指令,如此,在实际使用时,用户仅通过打开镜腿20和/或折叠镜腿20便可完成特定的控制指令的输入,从而极大地简化了用户的操作方式,提升了用户的使用体验。可见,相较于传统的触控或按压控制的智能眼镜而言,本技术的智能眼镜具有操作便捷的优点。
56.在一些实施例中,触发信号包括第一触发信号和第二触发信号,控制指令包括第一控制指令和第二控制指令,当两只镜腿20均处于折叠状态时,霍尔传感器31与磁体32的位置相对,且霍尔传感器31生成第一触发信号,该处理器40在收到第一触发信号时,执行第一控制指令,当至少一只镜腿20处于打开状态时,该霍尔传感器31生成第二触发信号,该处理器40在收到第二触发信号时,执行第二控制指令。可以理解,第一触发信号和第二触发信号为两种不同的电平信号,第一控制指令和第二控制指令为两种不同的电平信号对应的两种控制指令。
57.具体为,霍尔传感器31检测到磁感应强度超过导通阈值bop(霍尔传感器工作点)时,霍尔传感器31输出一种电平信号,当检测到磁感应强度降低到brp(霍尔传感器释放点)时,霍尔传感器31输出另一种电平信号。
58.结合到本技术的技术方案中,当两只镜腿20均处于折叠状态时,霍尔传感器31生成第一触发信号,该第一触发信号即为一种电平信号;当至少一只镜腿20处于打开状态时,
霍尔传感器31生成第二触发信号,该第二触发信号即为另一种电平信号。这其中,镜腿20的张开和折叠,本质上是改变了的磁铁与霍尔传感器31之间的距离,进而使霍尔传感器31能够检测到不同强度的磁场强度,以输出不同的电平信号。
59.具体地,霍尔传感器31和磁体32分别设于两只镜腿20,两只镜腿20均相较于镜框10折叠时,霍尔传感器31和磁体32的位置近,霍尔传感器31检测到的磁感应强度较强,此时,霍尔传感器31的磁感应强度值大于设定的导通阈值bop(霍尔传感器工作点),霍尔传感器31输出第一触发信号。当一只镜腿20或两只镜腿20相较于镜框10打开时,霍尔传感器31和磁体32的位置远,霍尔传感器31检测到的磁感应强度弱,此时,霍尔传感器31的磁感应强度值小于设定的brp(霍尔传感器释放点),霍尔传感器31能够输出第二触发信号。
60.在本实施例中,霍尔传感器31被设置为当检测到磁感应强度超过导通阈值bop(霍尔传感器工作点)时,霍尔传感器31输出低电平,当检测到磁感应强度降低到brp(霍尔传感器释放点)时,霍尔传感器31输出高电平,即是说,第一触发信号被设置为低电平信号,第二触发信号被设置为高电平信号。该处理器40在收到低电平信号时,执行与低电平信号关联的第一控制指令,该处理器40在收到高电平信号时,执行与高电平信号关联的第二控制指令。当然,在另一些实施例中,第一触发信号被设置为高电平信号,第二触发信号被设置为低电平信号。
61.值得说明的是,本技术的设计不限于此,在其他实施例中,可使用线性霍尔传感器31,由于线性霍尔传感器31输出的电平信号与磁体32的磁场强度呈线性关系,如此,使得线性霍尔传感器31可以输出多种电平信号,以使得触发信号可以设置多种示例性地,触发信号可以设置为3种、4种、5种等,相应地,控制指令可以设置为3种、4种、5种等。
62.在一些实施例中,第一控制指令包括开机指令,第二控制指令包括关机指令。
63.具体地,我们在处理器40中嵌入了智能眼镜的开机指令和关机指令,并将关机指令与一种触发信号关联,将开机指令与另一种触发信号关联。如此一来,用户在使用本技术技术方案的智能眼镜时,只需打开镜腿20,便可实现智能眼镜的开机,同时,用户通过折叠镜腿20便可实现智能眼镜的关机。这样,极大地简化了用户开关智能眼镜的操作,并且,这种操作方式与常规眼镜的佩戴与收纳的方式相结合,使得智能眼镜的开关更为无感,也更为低学习成本。
64.在一些实施例中,第一控制指令包括休眠指令,第二控制指令包括唤醒指令。
65.具体地,我们在处理器40中嵌入智能眼镜的休眠指令和唤醒指令,并将休眠指令与第一控制指令关联,将唤醒指令与第二控制指令关联。如此一来,用户在使用本技术技术方案的智能眼镜时,只需打开镜腿20,便可实现智能眼镜的休眠和唤醒。这样能够简化用户操作,同时,用户在长时间使用后、需要休息时或者暂时不使用时,将两只镜腿20折叠,让智能眼镜进入待机状态,以节约智能眼镜电量,从而提高智能眼镜的续航,在用户需要使用时,将至少一个镜腿20打开,以唤醒智能眼镜,从而供用户再次使用。
66.值得说明地说,本技术的设计不限于此,事实上,开发人员可以根据不同应用场景与不同使用需求而开发不同的控制指令,并将这些控制指令与霍尔传感器31的触发信号相关联,以实现不同的功能或操作,例如,可以将断开蓝牙连接和连接蓝牙两个功能与一种触发信号和另一种触发信号关联,以实现打开镜腿20以自动连接蓝牙,折叠镜腿20以自动断开蓝牙的功能。
67.在一些实施例中,该智能眼镜包括电池50,该电池50与霍尔传感器31电连接,以为霍尔传感器31供电。该电池50还与处理器40电连接,以同时为处理器40供电,在镜腿20上还设有电池50的充电部(未标示),以方便电池50充电。该充电部可以设置为充电接口的形式,如micro usb接口、usb type-c接口等,也可设置为充电端子的形式。当然,在一些实施例中,该电池50也可设置为以通过无线充电的方式进行充电。
68.在一些实施例中,霍尔传感器31为单极性霍尔传感器。需要说明地是,单极性霍尔传感器具有极性识别的能力,单极性霍尔传感器正面能够感应指定的磁极,反面能够感应与指定磁极相反的磁极。
69.具体地,在本实施例中,该单极性霍尔传感器被设置为s极性霍尔传感器,即使说,该s极性霍尔传感器正面感应磁场s极,反面感应磁场n极,该s极性霍尔传感器正面在靠近磁体32的s极、且检测到磁体32s极的磁感应强度超过导通阈值bop时,s极霍尔传感器输出低电平。这样设置,当磁体32位于s极霍尔传感器的背面时,即磁体32的n极与s极霍尔传感器的反面相对,如此,s极性霍尔传感器反面在靠近磁体32的n极、且检测到磁体32n极的磁感应强度超过导通阈值bop时,s极霍尔传感器能够输出低电平,这样无论两只镜腿20谁先折叠,谁后折叠,均可在折叠状态下输出所需的电平信号。通过上述设置,控制指令的输入无需依赖于特定的镜腿20折叠方式/顺序,从而能够降低用户的学习成本,并简化镜腿20的操作方式。
70.值得说明的是,在其他实施例中,该单极性霍尔传感器被设置为n极性霍尔传感器,即使说,该n极性霍尔传感器正面感应磁场n极,反面感应磁场s极。
71.值得说明的说,本技术的设计不限于此,在其他实施例中,霍尔传感器31可以设置为双极性霍尔传感器、全极性霍尔传感器和线性霍尔传感器中的一者。
72.进一步地,该单极性霍尔传感器被设置为低功耗霍尔传感器,待机功耗仅为1~2ua,如此,能够节省智能眼镜电池50的电量,以提升智能眼镜的续航。同时,该单极性霍尔传感器采用dfn封装、相较于qfn封装,dfn封装灵活性更高,此外,该单极性霍尔传感器尺寸仅为1.6*1.6mm,高度0.5mm,使得体积小且重量轻,这样使得智能眼镜小巧,美观,同时便于携带,单极性霍尔传感器还对外部磁场环境具有良好的抗干扰性,使得智能眼镜能够避免由于外部磁场环境而误触。
73.在一些实施例中,镜腿20具有层叠区域21,当两只镜腿20均处于折叠状态时,两只镜腿20上的层叠区域21相互层叠,霍尔传感器31和磁体32设于层叠区域21。
74.具体地,当两个镜腿20均处于折叠状态时,两只镜腿20的层叠区域21能够相互层叠,这样,设于层叠区域21的霍尔传感器31和磁体32在相互靠近时,两者之间的距离能够更近,如此,能够提高霍尔传感器31与磁体32感应的准确性,并进一步提高智能眼镜的可靠性。
75.在一些实施例中,霍尔传感器31靠近镜腿20的内侧壁设置。这其中,镜腿20的内侧是指眼镜佩戴时,镜腿20朝向用户脸部的一侧。可以理解,将霍尔传感器31设于镜腿20的内侧,能够有效的防止外部磁场误触霍尔传感器31,导致执行控制指令。同时,将霍尔传感器31设于镜腿20的内侧还能够提升霍尔传感器31的隐蔽性,并能够为霍尔传感器31提供一定程度的保护。当然,本技术的设计不限于此,在其他实施例中,霍尔传感器31也可设于镜腿20的外侧壁或中部。
76.在一些实施例中,磁体32靠近镜腿20的内侧壁设置。可以理解,将磁体32设于镜腿20的内侧,能够提升磁体32的隐蔽性,并能够为磁体32提供一定程度的保护。当然,本技术的设计不限于此,在其他实施例中,磁体32也可设于镜腿20的外侧壁或中部。
77.在一些实施例中,两只镜腿20中空形成有安装腔22,该霍尔传感器31设于一镜腿20的安装腔22中,并设置于安装腔22朝向所述镜腿20内侧的腔壁,磁体32设于另一镜腿20的安装腔22中,并设置于安装腔22朝向所述镜腿20内侧的侧壁。可以理解,通过设置安装腔22以安装霍尔传感器31和磁体32,能够隐藏霍尔传感器31和磁体32,以提高智能眼镜的一体性,进而以确保智能眼镜的美观性,同时,这种封闭式的结构,使得智能眼镜具有一定的防水能力,以避免智能眼镜落入水中或者粘有水时,造成智能眼镜内部部件进水,造成智能眼镜部件损坏而无法使用。此外,这种中空形成腔体的结构,相较于在镜腿20上外设壳体,在壳体内形成腔体、以容纳霍尔传感器31和磁体32,镜腿20中空这种结构,能避免占用镜腿20的体积,进而影响智能眼镜佩戴的舒适性。此外,将霍尔传感器31和磁体32设置于安装腔22朝向所述镜腿20内侧的腔壁,相较于直接将霍尔传感器31和磁体32设置于安装腔22内,能够避免霍尔传感器31的感应磁场能力减弱和磁体32的磁场减弱,从而影响霍尔传感器31与磁体32感应的准确性。
78.在一些实施例中,智能眼镜还包括主控板60,该处理器40设于主控板60。可以理解,将处理器40设于主控板60,能够提高智能眼镜的集成度,以便于智能眼镜的小型化及轻型化设计,提升用户的佩戴体验。
79.进一步地,镜腿20设有容纳腔23,容纳腔23与安装腔22连通,主控板60设于容纳腔23内,智能眼镜还包括电连接线90,该电连接线90的一端与霍尔传感器31连接、另一端与主动板电连接。
80.具体地,镜腿20中空以形成容纳腔23,该容纳腔23用于容纳主控板60,这样设置,能够隐藏主控板60,以提高智能眼镜的一体性,进而以确保智能眼镜的美观性。同时,将容纳腔23与安装腔22连通,电连接线90能够一端进入容纳腔23内,从电池50的电池50接口接入,进而电连接到主控板60,另一端进入安装腔22内,与霍尔传感器31电连接,如此形成完整的电路。
81.进一步地,该电连接线90为柔性线路板。柔性电路板具有重量轻、厚度薄、易弯折等优点,设置该柔性电路板作为电连接线90可降低电连接线90的布线难度。
82.在一些实施例中,智能眼镜包括两个处理器40和两组触发模块30,两个处理器40分别设于两个镜腿20,两组触发模块30的霍尔传感器31和磁体32分别设于两只镜腿20,且一只镜腿20上设有一组触发模块30的霍尔传感器31、以及另一组触发模块30的磁体32,一所述镜腿20上的霍尔传感器31与磁体32在镜腿20的延伸方向上间隔设置,两个镜腿20上的霍尔传感器31分别与两个镜腿20上的处理器40电连接。
83.可以理解,通过将两个镜腿20上的霍尔传感器31分别与各自镜腿20上的处理器40电连接,两个处理器40能够分别控制两只镜腿20控制指令的输入,示例性地,在实际使用时,用户需要一只镜腿20发声,另一只镜腿20不发声时,此时,可将两只镜腿20相较于镜框10打开,两只镜腿20均生成第二触发信号,设于一个镜腿20的处理器40可执行本镜腿20第二触发信号对应的发声指令,设于另一个镜腿20的处理器40可执行本镜腿20第二触发信号对应的不发声指令,如此,能够实现同一镜腿20的处理器40,执行同一镜腿20的控制指令。
同时,将一只镜腿20上不同组的霍尔传感器31和磁体32间隔设置,能够避免不同组的霍尔传感器31和磁体32发生感应,以影响同组霍尔传感器31和磁体32正常工作。
84.值得说明地说,本技术的设计不限于此,在其他实施例中,该智能眼镜也可仅设一组处理器40,该一组处理器40通过同时电连接两只镜腿20上的霍尔传感器31,以同时执行两只镜腿20的控制指令。
85.进一步地,智能眼镜还包括通信模块70和发声模块80,该通信模块70于处理器40电连接,该通信模块70用于与终端通信建立通信连接,该发声模块80与处理器40电连接,该发声模块80可用于智能眼镜的音频播放。
86.可选的,该通信模块70可以基于蓝牙通信协议、wifi通信协议、红外通信协议、2.4g通信协议、3g/4g/5g通信等通信协议与终端建立通信。相应的,该终端可以具有上述通信协议至少一者的智能手机、平板电脑、智能手表、pc、笔记本电脑等。
87.可选地,该发声模块80可以是扬声器81、振动端子(骨传导或气传导)和定向音频发生器(定向传导)等其中的一者。
88.具体地,在本实施例中,该通信模块70包括蓝牙芯片,该发声模块80包括扬声器81。即是说,本技术的智能眼镜通过蓝牙通信协议与终端建立通信连接、通过扬声器81进行音频播放。在实际使用时,蓝牙芯片能够提供两个蓝牙通道,其中一个蓝牙通道用于连接一只镜腿20的处理器40和终端,另一个蓝牙通道用于连接该镜腿20的处理器40和另一只镜腿20的另一个处理器40,以实现同步通信和声音传输。
89.值得说明地说,本技术的设计不限于此,在其他实施例中,该发声模块80可以设置为振动端子,即智能眼镜通过骨传导或者气传导以实现音频播放,该发声模块80也可设置为定向音频发生器,即智能眼镜通过定向传导以实现音频播放。
90.在一些实施例中,处理器40用于在收到第一触发信号的第一预设时长后,执行与第一控制指令,以及,在收到第二信号的第二预设时长后,执行与第二控制指令。这其中,第一预设时长是指处理器40在第一次接收到第一触发信号后需要等待的时长,第二预设时长时指处理器40在第一次接收到第二触发信号后需要等待的时长,在实际使用时,处理器40需满足一次接收到第一触发信号后和一次收到第二触发信号后,等待一定时长过后,再次检测到第一触发信号和第二触发信号,才执行与第一触发信号对应的控制指令和第二触发信号对应的控制指令,否则不允许处理器40执行控制指令,这样设置能够降低误操作的概率,提高智能眼镜的操作体验。
91.需要说明地是,第一预设时长和第二预设时长可以是相同的时长,也可以是不同的时长,示例性地,第一预设时长可以是1s、2s、3s、4s、5s、6s等,第二预设时长可以是1s、2s、3s、4s、5s、6s等。
92.值得说明地说,本技术的设计不限于此,在其他实施例中,也可以不设置第一预设时长和第二预设时长,即是说,处理器40在收到第一触发信号和第二触发信号后,立即执行第一触发信号和第二触发信号对应的控制指令。
93.以上所述仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是在本发明的发明构思下,利用本发明说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本发明的专利保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。