一种精准停车的磁导航agv
技术领域
1.本技术涉及agv技术领域,具体为一种精准停车的磁导航agv。
背景技术:
2.随着agv小车应用的普及,在某些场合下,对agv小车的性能要求越来越高。在导航停车定位方面,磁导航是发展较早且应用广泛的技术之一。但是,单独使用磁导航停车定位的精度不高,误差较大。
3.为提高磁导航停车定位精度,专利(申请号:202121632308.x)提出rfid标签进行辅助定位:即在磁条路径一侧布置rfid标签,车载rfid读取器与rfid标签相互感应后停车,利用磁导航传感器和定位磁条进行二次定位,提高提车精度。专利(申请号:202210261858.8)提出对磁导航传感器霍尔检测节点位置坐标的插值计算,提高磁导航传感器导航定位精度。
4.然而,现有技术仍存在如下几个问题。
5.一是rfid标签和定位磁条组合的agv停车策略,由于传感器采集位置信息的对象不同,agv停车精度依赖于两个对象间的位置精度,实现难度较大。
6.二是对agv小车停车位置的二次校正调整需要针对偏差方向和偏差量进行多次反复计算和驱动,存在耗时长的问题。
7.三是插值法在提高磁导航传感器检测磁条中心位置精度的同时,却无法克服agv载重变化带来的惯性变化引起的停车误差。
8.本技术提出一种精准停车的磁导航agv,可以有效解决或缓解现有技术的不足。
技术实现要素:
9.本技术实施例提供一种精准停车的磁导航agv,以解决或缓解现有技术中的一项或更多项技术问题。
10.作为本技术实施例的一个方面,本技术实施例提供的精准停车的磁导航agv,包括:agv小车、车前磁导航传感器、车中磁导航传感器、主干磁条、定位磁条、驱动器、信息处理器,所述车前磁导航传感器设置于所述agv小车的底部靠前中心轴线上,所述车中磁导航传感器设置于所述agv小车的底部中心位置,所述主干磁条为所述agv小车的规划路径的主要组成,所述agv小车沿着所述主干磁条移动,所述定位磁条与所述主干磁条组成十字交叉结点,作为所述agv小车的目标停车位置,所述驱动器和所述信息处理器设置于所述agv小车上,所述驱动器用于驱动所述agv小车移动、减速和停止,所述信息处理器用于处理所述车前磁导航传感器和车中磁导航传感器采集到的所述主干磁条和所述定位磁条的磁信号,所述磁导航传感器与所述信息处理器电连接。
11.作为本技术实施例的进一步改进,所述车前磁导航传感器包含16位霍尔磁检测单元,所述车中磁导航传感器包含8位霍尔磁检测单元,所述车前磁导航传感器和所述车中磁导航传感器用于检测主干磁条和定位磁条与agv小车的相对位置。
12.作为本技术实施例的进一步改进,所述驱动器设置于所述agv小车上,所述驱动器与所述信息处理器电连接。
13.作为本技术实施例的进一步改进,所述主干磁条和定位磁条的宽度小于8位磁导航传感器的长度,定位磁条的长度大于16位磁导航传感器的长度。
14.本技术实施例与现有技术相比所带来的有益效果是:本技术利用车前磁导航传感器和车中磁导航传感器分别采集定位磁条的磁信号,利用车前磁导航传感器与车中磁导航传感器的相对位置,结合信息处理程序和驱动器对agv小车实施先减速后精准停车的控制,降低agv小车停车的控制难度,提高agv的运行效率;同时,磁导航是当前最成熟可靠的agv导航方案,避免了采用其他导航技术带来的不可靠风险。
附图说明
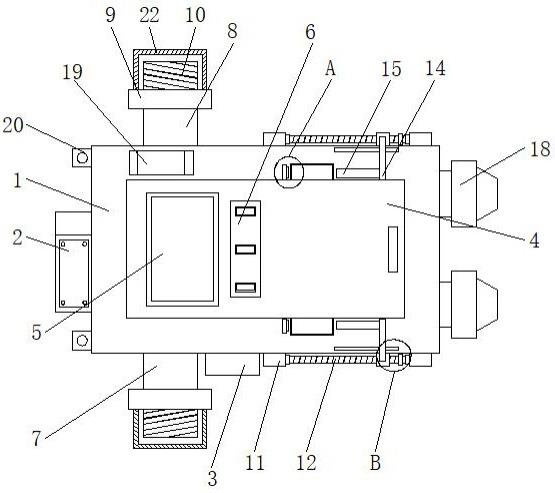
15.图1所示为本技术实施例整体示意图。
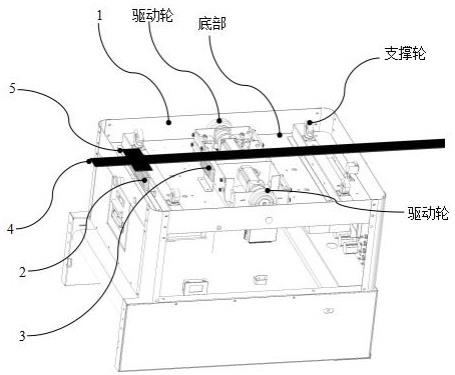
16.图2所示为本技术实施例整体示意图之驱动器和信息处理器。
17.图3所示为本技术实施例磁条和磁导航传感器的尺寸示意图。
18.附图标记说明:
19.1、agv小车;2、车前磁导航传感器;3、车中磁导航传感器;4、主干磁条;5、定位磁条;6、信息处理器;7、驱动器。
具体实施方式
20.为了使本技术领域的人员更好地理解本技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
21.在本技术的描述中,需要说明的是,术语“中心”、“前部”、“底部”、“前”、“后”、“中”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
22.对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
23.以下结合说明书附图和具体实施例对本技术实施例做进一步详细说明。
24.如图1和图2所示,本技术提供了一种精准停车的磁导航agv,包括agv小车1、车前磁导航传感器2、车中磁导航传感器3、主干磁条4、定位磁条5、信息处理器6和驱动器7,所述agv小车1沿着主干磁条4移动,所述定位磁条5与所述主干磁条4组成交叉结点,所述交叉结点为agv小车的预设停车位置,所述车前磁导航传感器2设置于所述agv小车1的底部靠前中心轴线位置,引导agv小车1沿主干磁条4往前移动,车中磁导航传感器3设置于所述agv小车的底部中心位置,所述车中磁导航传感器3与定位磁条5相对应,确定agv小车1与定位磁条5的预期相对位置,所述信息处理器6和驱动器7电连接,所述信息处理器6和车前磁导航传感器2以及车中磁导航传感器3电连接,所述信息处理器6和驱动器7设置于agv小车1上,所述驱动器7用于驱动所述agv小车1移动、减速和停止,所述信息处理器6用于处理所述车前磁
导航传感器2和车中磁导航传感器3采集到的所述主干磁条4和所述定位磁条5的磁信号。
25.本技术提供了一种精准停车的磁导航agv,其在agv小车底部中心位置新增车中磁导航传感器3,agv小车1的车前磁导航传感器2基于原有导航控制方法的基础上引导agv小车1沿主干磁条4向前移动,当车前磁导航传感器2检测到定位磁条3的磁信号时,该磁信号通过电连接传输给信息处理器6,信息处理器解析该磁信号并判断所述定位磁条3是否为agv小车1预设停车位置,若是,则将该磁信号处理结果通过电连接反馈给驱动器7,驱动器7控制agv小车1执行减速,当车中磁导航传感器3紧接着检测到定位磁条3的磁信号时,该磁信号通过电连接传输给信息处理器6,信息处理器6解析该磁信号并根据预设规则通过电连接反馈给驱动器7,驱动器7控制agv小车1停车。agv小车1在停车过程中,车前磁导航传感器2与车中磁导航传感器3实时检测主干磁条4的磁信号,根据该信号调整agv前行的方向,确保agv小车沿主干磁条移动。
26.如图3所示,主干磁条4和定位磁条5的宽度d小于8位车中磁导航传感器7的长度l2,定位磁条5的长度l1大于8位车中磁导航传感器7的长度l2小于16位车前磁导航传感器6的长度l3。
27.对于本领域的普通技术人员而言,具体实施例只是对本技术进行实例性描述,显然本技术实施例具体实现并不受上述方式的限制,只要采用了本技术的方法构思和技术方案进行的各种非实质性改进,或未经改进将本技术的构思和技术方案直接应用于其他场合的,均在本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。