1.本实用新型涉及移动充电技术领域,更具体地说,涉及一种制动能量控制电路及充电机器人。
背景技术:
2.随着新能源汽车技术的发展和推广应用,越来越多的人们开始购买和使用电动汽车,快捷、快速充电的需求正在急剧增加。在这个背景和趋势下,一种储能式可移动智能充电机器人开始出现在市面上,它由大容量储能电池组、充电机、底盘电驱等部分构成,其中底盘电驱系统与系统控制电源共用低压母线。
3.在使用上,通常是采用遥控或自动行驶到目标位置进行快捷和快速充电,极大便利了人们的充电需求,也提高了极好的充电体验。但是,这种可移动充电机器人在刹车或长下坡时,其底盘电机将回馈一个较高的短时高压到系统的低压电源单元,触发了该低压电源单元的过压保护功能,从而使得系统的低压电源单元产生保护性失电,进而导致整机的控制系统失去低压电源而停机,这严重影响了储能式移动充电机的正常工作。
4.而针对上述问题,经检索,现有技术中并没有很好地解决方案。
技术实现要素:
5.1.实用新型要解决的技术问题
6.鉴于上述现有技术存在的问题,本实用新型提供了一种制动能量控制电路及充电机器人;本实用新型可以实时监测充电机器人在刹车或下坡时由电驱底盘系统回馈的短时高电压,并在阈值内自动控制泄放电阻以吸收此回馈能量,避免系统的低压电源单元误保护,保证可移动智能充电机器人的正常工作。
7.2.技术方案
8.为达到上述目的,本实用新型提供的技术方案为:
9.本实用新型的一种制动能量控制电路,包括储能电池组、低压电源单元和底盘电驱系统,还包括制动能量检测与控制单元,所述的储能电池组的输出端连接低压电源单元,低压电源单元连接底盘电驱系统,所述的制动能量检测与控制单元设置于低压电源单元和底盘电驱系统之间,该制动能量检测与控制单元用于监测底盘电驱系统回馈的短时高压,并吸收该高压能量。
10.更进一步地,所述的制动能量检测与控制单元包括电压检测模块vc、泄放电阻r和继电器k4,电压检测模块vc正端、继电器k4的一端共同与低压电源单元输出端连接,继电器k4的另一端通过泄放电阻r与低压电源单元输出端的gnd连接,电压检测模块vc的负端与低压电源单元输出端的gnd连接,电压检测模块vc通过控制信号线连接继电器k4。
11.本实用新型的一种充电机器人,包括所述的制动能量控制电路。
12.更进一步地,还包括充电控制器、dc/dc充电模块和充电枪,dc/dc充电模块输入端通过继电器k1与储能电池组连接,dc/dc充电模块的输出端通过继电器k2与充电枪连接,充
电控制器通过通信线分别与储能电池组、dc/dc充电模块、充电枪连接。
13.更进一步地,所述的低压电源单元的输出端与充电控制器连接,并通过继电器k3与充电枪连接。
14.更进一步地,所述的充电控制器通过控制信号线分别连接继电器k1、继电器k2和继电器k3。
15.更进一步地,所述的低压电源单元包括电源变换装置和断路器qf,断路器qf设置于储能电池组和电源变换装置之间,电源变换装置将储能电池组的高电压转换成24v低压。
16.更进一步地,所述的底盘电驱系统包括电机控制器mcu和电机m,电机控制器mcu连接低压电源单元。
17.3.有益效果
18.采用本实用新型提供的技术方案,与已有的公知技术相比,具有如下有益效果:
19.(1)本实用新型的一种制动能量控制电路,可以实时监测充电机器人在刹车或下坡时由电驱底盘系统回馈的短时高电压,并在阈值内自动控制泄放电阻以吸收此回馈能量,能较好的解决充电机器人在移动过程中,因刹车或长下坡而发生的电机系统回馈能量过高,误触发系统低压电源单元保护性失电的问题,有效保证了充电机器人工作的稳定性和可靠性;
20.(2)本实用新型的一种制动能量控制电路,电路结构设计简单,实现成本相对较低,具有较高的推广应用价值。
附图说明
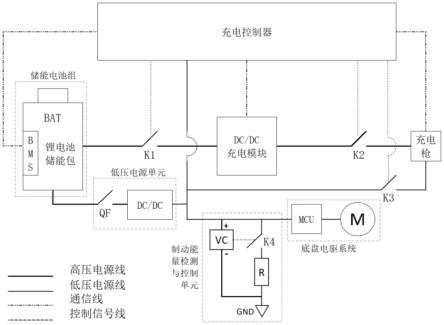
21.图1为本实用新型的充电机器人制动能量控制电路的示意图。
具体实施方式
22.为进一步了解本实用新型的内容,结合附图和实施例对本实用新型作详细描述。
23.实施例1
24.结合图1,本实施例的一种制动能量控制电路,包括储能电池组bat、低压电源单元、底盘电驱系统和制动能量检测与控制单元。储能电池组bat由锂电池储能包和电池管理系统bms构成。储能电池组bat的输出端连接低压电源单元,低压电源单元由电源变换装置dc/dc和断路器qf构成,断路器qf设置于储能电池组和电源变换装置之间,电源变换装置将储能电池组的高电压转换成24v低压,作系统控制电源和电机控制器mcu工作电源用,低压电源单元连接底盘电驱系统,底盘电驱系统包括电机控制器mcu和电机m,用来产生运动的效果。
25.所述的制动能量检测与控制单元设置于低压电源单元和底盘电驱系统之间,该制动能量检测与控制单元包括电压检测模块vc、泄放电阻r和继电器k4,电压检测模块vc正端、继电器k4的一端共同与低压电源单元输出端连接,继电器k4的另一端通过泄放电阻r与低压电源单元输出端的gnd连接,电压检测模块vc的负端与低压电源单元输出端的gnd连接,电压检测模块vc通过控制信号线连接继电器k4。制动能量检测与控制单元中电压检测模块vc用以实时监测底盘电驱系统在刹车或长下坡时回馈的短时高压,当此回馈电压危及系统低压电源单元正常工作时,将主动闭合继电器k4,让泄放电阻r吸收底盘电驱系统回馈
的高压能量,吸收完成后,继电器k4被正常释放,电压检测模块vc继续实时监测。
26.实施例2
27.本实施例的充电机器人包括充电控制器、dc/dc充电模块、充电枪和如实施例1所述的制动能量控制电路,dc/dc充电模块输入端通过继电器k1与储能电池组连接,dc/dc充电模块的输出端通过继电器k2与充电枪连接,充电控制器通过通信线分别与储能电池组、dc/dc充电模块、充电枪连接。低压电源单元的输出端与充电控制器连接,并通过继电器k3与充电枪连接。充电控制器通过控制信号线分别连接继电器k1、继电器k2和继电器k3。
28.当闭合断路器qf时,低压电源单元中dc/dc得电并输出24v低压电源,充电控制器、电机控制器mcu及制动能量检测与控制单元中电压检测模块vc均得电工作,其中充电控制器执行自检程序,自检通过后整机处于待机状态。
29.当智能充电机器人向目标位置移动时,制动能量检测与控制单元中电压检测模块vc将实时监测底盘电驱系统的回馈电压,当此回馈电压危及系统低压电源单元正常工作时,将主动闭合继电器k4,让泄放电阻r吸收底盘电驱系统回馈的高压能量,吸收完成后,k4被正常释放,电压检测模块vc继续实时监测。
30.本实施例能较好的解决智能充电机器人在移动过程中因刹车或长下坡而发生的电机系统回馈能量过高误触发系统低压电源单元保护性失电的问题,有效保证了系统的稳定性和可靠性,成本低,具有较高的推广应用价值。
31.以上示意性的对本实用新型及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。