用于精准农业的增强的管理区
1.要求优先权
2.本非临时申请根据35u.s.c.
§
120要求作为于2019年11月29日提交的题为“enhanced management zones for precision agriculture”的非临时申请16/699292的部分延续权益,其通过引用整体并入本文。
3.版权声明
4.本专利文件的公开的一部分包含受版权保护的材料。版权所有人不反对传真复制专利文件或专利公开,因为它出现在专利和商标局专利文件或记录中,但无论怎样在其他方面都保留所有版权权利。
背景技术:
5.为了从他们控制的农业用地获得增加的产量,近年来,农民转向“精准农业”,以区分单独田地内具有不同程度的肥沃程度或其他性质的区域,并确定针对在具体地点基础上的肥料施用和其他管理的最佳做法。这种特定于地点的应用是通过可变速率技术(variable rate technology,vrt)实现的:精准农业设备基于土壤、作物等的空间变化性,在田地内以不同速率施用诸如肥料和土壤改良剂的投入物(input)。精准农业的一种方法是在单独田地内划定“管理区”。管理区是田地内在其中具有类似的特性的服从共同管理并且与该田地内其他类似划定区域内不同的区域。
6.通常采用的“精准农业”利用了美国农业部(usda)自然资源保护局的土壤调查地理数据库(soil survey geodatabase,ssurgo)。驻留在ssurgo中的数据虽然提供了土壤状况的有用近似值,但其发起人从未打算其被用于指导精准农业或在田地内开发农业管理区。
7.其他管理区划定技术往往是局部的和特定于田地的,依赖于较旧的技术,诸如(对土壤电导率进行)近端感测、基于卫星图像的小样本(有时只有一个样本大小)的视觉模式识别、地形分析、网格土壤采样、作物产量监测数据以及农民和/或顾问知识。
附图说明
8.通过参考下面结合附图所进行的具体实施方式,可以最好地理解说明操作的组织和方法连同目的和优点的某些说明性实施例,其中:
9.图1是示出与本发明的某些实施例一致的区域属性和配方建议(zone attributes and prescription recommendation)的简化(reduction)的第一过程-流程图。
10.图2是示出与本发明的某些实施例一致的区域属性和配方建议的简化的第二过程-流程图。
11.图3是示出与本发明的某些实施例一致的区域属性和配方建议的简化的第三过程-流程图。
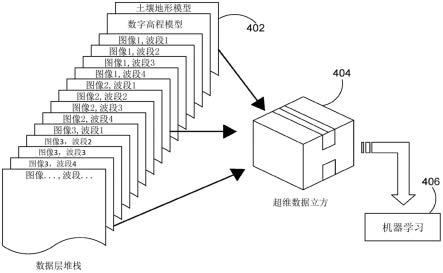
12.图4是与本发明的某些实施例一致的数据堆栈简化为机器学习就绪数据立方的视图。
具体实施方式
13.虽然本发明易受许多不同形式的实施例的影响,但在附图中示出并将在本文中详细描述特定实施例,并理解这种实施例的本公开将被认为是原理的示例,并不旨在将本发明限于所示和描述的特定实施例。在下面的描述中,类似的附图标记被用于在附图的几个视图中描述相同、相似或相应的部分。
14.如本文所用的术语“一”或“一个”,被定义为一个或多于一个。如本文所用的术语“多个”被定义为两个或多于两个。如本文所用的术语“另一个”被定义为至少第二个或更多个。如本文所用的术语“包括”和/或“具有”被定义为包含(即,开放语言)。
15.在整个本文档中对“一个实施例”、“某些实施例”、“实施例”或类似术语的引用意味着结合实施例描述的特定特征、结构或特性被包括在本发明的至少一个实施例中。因此,贯穿本说明书的各个地方出现的这种短语不一定全部指同一实施例。此外,特定特征、结构或特性可以在一个或多个实施例中以任何合适的方式被组合,而不受限制。
16.在整个本文档中对“ssurgo”的引用表示美国农业部自然资源保护局的土壤调查地理数据库。
17.本文中对“dem”或其复数“dems”的引用表示“数字高程模型”或“多个数字高程模型”。
18.本文中对“stm”的引用表示“土壤地形模型”。
19.本文中对“遥感”的引用表示人和机器在没有物理接触的情况下获取信息,包括航空和卫星图像以及光探测和测距(下文简称“lidar”)。
20.本文中对诸如“人工智能”和/或“深度学习”的学习系统的引用表示通过使用统计、分类算法、人工神经网络、机器学习和/或特征识别或模式识别的数据分析。
21.本文中对“区域”或“多个区域”的引用表示符合预先制定的农业标准的一个或多个地理空间区域,在非限制性示例中,这种标准简单如描述该区域尺度和边界的纬度和经度坐标,或复杂如符合特定产量和土壤变化状况。
22.本文中对“可变速率技术”的引用表示使种植者能够将不同或不同速率的农业投入物和管理应用于单独田地内的各种空间限定的区域(作为非限制性示例,管理区)的技术。
23.本文中对“地面实况”的引用表示收集有关种植的作物品种、土壤测试结果、过去施用的肥料和土壤改良剂以及每种作物种植区的实际产量的过去数据,这些数据呈现出特定地理区域的管理和产量的真实写照。
24.为了最大化作物产量,几千年来,农民们不仅试图更好地了解在其中他们的植物表现最佳的条件,而且还了解播种这种植物的种子的田地为他们的作物提供的条件。显然,最好地将田地状况和作物需求相匹配的农民可以更有把握地最大化或至少提高作物产量。
25.最近的精准农业技术已经使用技术来开发作物管理区的识别和划定,这些识别和划定过于局部和特定于田地。传统土壤测绘的土壤景观范式(soil-landscape paradigm)认识到影响土壤空间分布的五个因素:气候、生物(organism)、地形(relief)、母质(parent material)和时间。有关土壤母质或表层地质的最详细信息来源是usda-nrcs(ssurgo)发布的土壤调查地图。虽然在他们的时代是有用的工具,但土壤调查地图本身并不包含确保农民获得最先进产量所需的详细水平。
26.因此,需要一种农业技术,在缺乏过于局部的特定于田地的数据的情况下,允许在广泛的地理范围内进行管理区的划定。虽然在实施例中,当前的创新利用来自ssurgo的母质信息作为输入数据层,但它还使用其他数据源来说明其他产量相关因素。在进一步的实施例中,当前的创新使用具有来自多个源的数据的重复人工智能过程来提供粒状区域细节(granular zone detail)。
27.当前的创新通过基于遥感、模式识别和由机器学习和统计分析组成的人工智能能力,在广阔的地理范围内划定增强的管理区,并将它们所有与源自现有全国土壤调查数据库中的数据相结合,指导精准农业采样和管理。通过划定增强的管理区,农民可以大幅减少制定土壤改良剂(诸如石灰和肥料)配方所需的土壤样本数量。这些区域同样非常适合选择针对不同土壤环境开发的作物品种。增强的管理区在指导控制杂草、害虫和作物疾病的措施也可以是有用的。另外,这种区域可能证明在非农业土地管理(诸如,林业和自然资源保护)中有用。
28.在实施例中,当前的创新结合了地形和光谱信息的利用。基于航空lidar,从高分辨率dem生成多尺度地形导数(derivatives)。这些数字地形导数包括但不限于斜坡梯度、相对高程、剖面曲率和平面曲率。另外,还编制了多时间、多/超光谱、卫星和航空图像。现有植被和土壤指数(vegetation and soil indice)根据这些图像的光谱波段被计算。这些指数是图像波段(imagery band)的数学组合,在历史上已被证明在表征植被和土壤中有用。在识别管理区和预测土壤性质的过程中,以不同分析尺度创建的多个地形导数被用作与光谱层平行的地理空间层。土壤性质包括所有识别的协变(co-variant)。
29.在实施例中,可以形成超维数据立方以向预测系统的分析和机器学习过程提供输入。超维数据立方可以基于在形成超维数据立方中使用的传感器、图像、地面实况、分析指数、土壤母体和数字地形分析数据,在不同方面被形成。在一个或多个非限制性示例中,超维数据立方可以利用来自田地状况遥感的传感器数据创建多尺度数字地形分析数据,结合从ssurgo输入的土壤母质数据被形成。可替选地,超维数据立方可以利用来自卫星和其他成像系统的图像波段数据与计算的植被和土壤指数相结合被形成。另一个超维数据立方可以通过利用来自田地状况遥感的传感器数据创建多尺度数字地形分析数据,结合从ssurgo输入的土壤母质数据被形成,以及利用来自卫星和其他成像系统的图像波段数据与计算的植被和土壤指数创建多光谱数据立方相结合被形成。系统可以使用每个数据立方来预测土壤区域属性,并为作物种植、区域管理和土壤维护提供建议。
30.在非限制性示例中,数据立方可以被用作系统使用的isodata的输入,并被用于训练人工智能算法以预测和/或估计某些农艺参数。预测和/或估计的农艺参数与地面实况相结合,以划定一组优化的管理区。
31.在实施例中,无监督分类算法将被用于区域划定:给定多尺度地形和与母质数据分层的一些感兴趣的农业田地的多光谱层(例如,数据立方),该算法将基于共同的区域内数据特征划定不同的农业区域。这些区域可以通过相对产量和产量稳定性和/或地理参考土壤样本测试数据的变化被表征。由于输入数据本质上是连续的,因此土壤性质和/或产量的预测被视为回归问题,并使用完全连接的神经网络。
32.在实施例中,人工智能(ai)(在非限制性示例中,诸如模式识别)被应用于地理参考作物产量和土壤测试数据,以基于数据立方划定初步管理区,而无论与ai过程所采用的
数据立方方面如何。区域划定基于可变区域大小被优化。在非限制性示例中,优化的区域大小可以是种植者期望的最小区域大小。每个单独种植者的区域大小可以根据种植者可以或打算使用可变速率技术管理的最小面积来计算。可变速率技术使种植者能够将不同类型或不同速率的农业投入物和土壤管理技术应用于单独田地内的各种空间界定区域,这些区域可以被称为“管理区”。因此,基于种植者希望使用的优选区域大小与人工智能算法预测和推荐的管理区的组合,每个种植者的区域划定可以是不同的。这种优化进一步划定了区域内的最小变化以及区域之间和区域中的最大变化。
33.python工具在机器学习中已经变得非常流行,并且当前的创新将在神经网络开发期间利用这些工具来创建区域属性和土壤管理建议。如pandas、numpy、tensorflow和keras的工具是完全支持构建神经网络和执行实现为种植者提供优化输出的输出模型所需的并行数学运算的库的几个具体示例。
34.神经网络是一种有监督的人工智能(与无监督的相反),它使用标记数据:对于每个输入样本,都会有相应的输出值,也被称为“地面实况”。输入和输出,被称为训练集,由具有未知系数的数学方程关联,在当前的创新的任何实施例中的网络必须学习这些数学方程。人类训练员监督神经网络的运行,并为神经网络提供必要的指导,以识别和学习数学方程的系数,产生可用的结果。
35.人类监督被用来确定网络学习情况如何,因为它在训练期间迭代输入并根据输出校正自己。在此阶段,对网络进行架构更改以提高其性能。当人类网络设计者确定针对训练集的准确性足够时,然后针对开发集(在任何训练活动之前,从前面的训练集中分离出来的一小组数据)测试网络。如果确定针对开发集的输出准确性不够,则可以调整其调谐参数(被称为超参数),并网络针对开发集迭代地重新运行,直到准确性提高为止。最后,网络针对“测试集”数据运行,其中可以确定模型对开发集的过拟合和欠拟合,并执行另一组调谐调整以分别更好地概括或更好地专门化模型。
36.在实施例中,当前的创新将使用完全连接的神经网络进行回归,每个土壤特性一个网络。无论采用何种数据立方方面,训练集都从数据立方中导出。值将缩放以归一化数据值,并且每个输入样本将对应于一个土壤测试点。每个土壤测试点的相应地面实况可以是取自相同位置的土壤特性值。所有数据层将共享相同的地理坐标系和投影。在开发期间,相应的地面实况标签将基于对实际产量监测和从相同位置收集的地理参考土壤样本测试数据的检查,如果这种数据可从客户获得的话。最后,将分配训练、开发和测试集。网络的目标准确性可以基于客户反馈被设置。从那里,可以进行先前描述的迭代过程。最终产品,rx maker模型,将由最终网络架构、学习参数、学习率、超参数值以及可能需要应用以减少偏差和方差误差的任何启发法(例如正则化)组成。
37.在这种实施例中,可以以无限高的分辨率进行土壤性质的结果预测;然而,随着分辨率的增加,关于预测准确性的不确定性也会增加。在非限制性示例中,随着管理区大小的增加,该区的异质性可能增加,但增加的预测范围降低了土壤性质的各自预测的不确定性。在商业环境中,模型输出将被聚合,以产生具有与农民的需求相适应并可通过农民设备的能力实施的不确定性水平的管理区大小。
38.模型输出的聚合将至少部分地使用空间概括技术来实现。这些包括但不限于融合(dissolve)区域边界的算法。融合区域边界有助于平滑粗糙的区域边缘,并将小区域区块
(patch)和/或夹杂物(inclusion)与较大的周围区域融合。平滑粗糙的区域边缘并将小区域或夹杂物融入较大的周围区域可以允许系统将由较大区域和一个或多个平滑的粗糙区域或区域区块和夹杂物组成的组合区域上的较大区域的土壤性质预测关联起来。以这种方式,融合区边界可以创建由大区域和一个或多个区域区块和/或夹杂物组成的聚合区。
39.在非限制性示例中,esri提供的arcgis工具集提供的泛化(generalization)工具可以被用于实现这种区域平滑。泛化工具可以包括但不限于聚合(aggregate)、边界清理(aggregate)、扩展(expand)、众数滤波(majority filter)、蚕食(nibble)、区域组(region group)、收缩(shrink)和精简(thin)工具。
40.农业区域的优化可以通过使用前面讨论的每个数据立方方面被创建。第一方案可以通过应用第一超维数据立方作为一个或多个学习算法的输入来实现,该数据立方包括来自田地状况遥感的传感器数据创建多尺度数字地形分析数据与从ssurgo输入的土壤母质数据相结合,其中学习算法是有监督的或无监督的。可替选地,第二方案可以通过应用利用来自卫星和其他成像系统的图像波段数据与计算的植被和土壤指数相结合形成的超维数据立方再次作为一个或多个有监督或无监督学习算法的输入来实现。第三方案可以通过利用来自田地状况遥感的传感器数据创建多尺度数字地形分析数据与从ssurgo输入的土壤母质数据相结合,以及利用来自卫星和其他成像系统的图像波段数据与计算的植被和土壤指数创建多光谱数据立方相结合作为一个或多个有监督或无监督学习算法的输入来实现。系统可以被要求利用超维数据立方的每个方面作为输入来创建区域属性、土壤预测和管理建议。然后,系统可以产生三个方案,一个来自利用第一、第二或第三数据立方方面的每个子过程。通过采用三个子过程来划定优化的农业区域,当前的创新在内部检验其结果,以实现最大的优化。将利用数据立方的三个方面作为输入的三个平行区域划定策略的结果彼此比较,并且可以向客户端提供最佳增强的管理区和推荐数据。优化通过确定最好地导致预测任何感兴趣的特定参数的数据立方来实现,其中感兴趣的输入参数由种植者或农场管理实体提供。
41.在非限制性示例中,用于优化农业区域属性、区域预测和建议的系统和方法至少包括具有与数据服务器通信的数据处理器,该数据服务器与能够向用户显示数据表示的用户设备进行数据通信。利用三个数据立方方面中的任何一个,系统可以使用遥感和数字分析来构建第一数据集,使用收集的图像波段和计算的指数来构建第二数据集,和/或使用第一数据集和第二数据集的输入的组合来构建第三数据集。然后,该系统可以将人工智能算法应用于第一数据集并输出第一区域属性集,将人工智能算法应用于第二数据集并输出第二区域属性集,以及将人工智能算法应用于第三数据集并输出第三区域属性集。为了确定最佳的区域属性集,系统可以根据用户作为指导输入的一个或多个参数来比较第一、第二和第三区域属性集。然后,系统可以向用户递送优化的区域属性集和一个或多个区域管理建议,其中该区域属性集呈现针对种植者或农场管理实体输入的所述一个或多个参数优化结果的区域属性和/或区域管理的建议。
42.现在转到图1,示出了示出与本发明的某些实施例一致的区域属性和配方建议的简化的第一过程-流程图。图1的子过程在100处开始。在非限制性示例中,经由航空lidar执行对田地状况的遥感102。在104处,基于lidar数据的数字高程模型(dem)经受多尺度数字地形分析(dta),其产生多个属性,包括作为非限制性示例,斜率曲率。这些属性将在后续步
骤中被使用。dta数据连同输入的土壤母质数据108一起被编译在数据立方(a)中106。在110处,数据编译被用于训练人工智能深度学习算法,以预测或估计地理参考作物产量和土壤测试参数。在114处,深度学习算法的应用(在110处)产生配方建议,通常以表格或地图的非限制性格式示例。在110处的深度学习算法的应用还产生区域属性(a)以在122处聚合区域和区域的属性。数据立方(a)106编译的数据连同土壤母质数据108也经受人工智能无监督分类学习算法112并被处理,以便在116处划定初步区域。118处的区域划定有效性基于区域捕捉地理参考土壤测试数据和作物产量中的空间变化的程度被评估。118处的区域划定有效性可以使用真实地面实况经验可证明数据被计算。可替选地,118处的区域有效性划定可以使用来自110处的深度学习算法应用的深度学习输出被计算。还评估基于ssurgo地图单元的区域划定。在所有候选划定中,最好的是:1)最大化所讨论的每个土壤或作物参数的统计上不同区域的总数(作为非限制性示例,当前的创新可以被用于制作特定参数地图,诸如磷的地图,不同于钾的地图的,而钾的地图又不同于有机物质的地图等);2)最大化这些参数的区间差异;以及3)最小化区域内区域加权的方差之和。这些评估的数据是实际地理参考土壤测试和产量数据(在可用时)。当不可用时,使用来自人工智能预测算法的预测。划定的“虚拟农艺有效性”基于区间差异大到足以保证差异可变速率管理的程度。这些判断基于以下做出:1)在种植者的可变速率应用设备的能力内,对差异管理做出反应的可能性;和2)种植者偏好。在120处,系统合并管理“规则”,并在122处导出与预先建立的管理规则一致的经平滑和聚合的区域的聚合区域属性(a)。子过程在124处结束。
43.现在转到图2,示出了描述与本发明的某些实施例一致的将输入图像和指数数据简化为区域属性和配方建议的第二过程-流程图。图2的子过程,可能与图1的子过程并行操作,在202处开始。在204处,收集多时间、多光谱卫星和航空图像波段。在206处,从收集的光谱波段计算现存植被和土壤指数。这些指数是图像波段的数学组合,已被证明在表征植被和土壤中有用。在208处,将光谱图像波段和计算的指数组合到数据立方(b)中210。数据立方(b)210编译的数据被输入到至少深度学习算法212和无监督学习算法214。
44.在212处,数据编译被用于训练人工智能深度学习算法,以预测或估计地理参考作物产量和土壤测试参数。在218处,深度学习算法的应用(在212处)产生配方建议,通常以表格或地图的非限制性格式示例。在212处的深层学习算法的应用还提供创建区域属性(b)的输入,以在224处聚合区域和区域的属性。
45.数据立方(b)210数据的编译数据也经受人工智能无监督分类学习算法214并被处理,以便在216处划定初步区域。220处的区域划定有效性基于区域捕捉地理参考土壤测试数据和作物产量中的空间变化的程度被评估。220处的区域划定有效性可以使用真实地面实况经验可证明数据被计算。可替选地,220处的区域有效性划定可以使用来自212处的深度学习算法应用的深度学习输出被计算。划定的“虚拟农艺有效性”基于区间差异大到足以保证差异可变速率管理的程度。这些判断基于以下做出:1)在种植者的可变速率应用设备的能力内,对差异管理做出反应的可能性;和2)种植者偏好。在222处,系统合并管理“规则”,并在224处导出与预先建立的管理规则一致的经平滑和聚合的区域的聚合区域属性(b)。子过程在226处结束。
46.现在转到图3,示出了示出与本发明的某些实施例一致的区域属性和配方建议的简化的第三过程-流程图。图3的子过程在300处开始。在310处,lidar被用于提供田地状况
的遥感。312处的多尺度数字地形分析导数和314处的土壤母质数据增强、308处的数据立方(c),以在326处训练人工智能深度学习预测算法,并在324处划定第三组优化农业区域。326处的深度学习算法在328处产生配方建议。数据立方(c)308在316处将数据输入到无监督学习算法,导致在318处的区域划定。在320处,系统利用来自深度学习算法的输入评估区域有效性。在322处,系统合并管理“规则”以在324处确定经平滑和聚合的区域的聚合区域属性(c)。在330处,子过程结束。
47.数据立方(a)、数据立方(b)和数据立方(c)的预测值被统计比较,以便选择最好地导致预测任何感兴趣的特定参数的数据立方(从数据立方a、b和c的集合中)。
48.现在转到图4,示出了与本发明的某些实施例一致的数据堆栈简化为机器学习就绪数据立方的视图。在402处的数据层堆栈中的每个层量化单个属性。属性包括:1)如在数字高程模型(dem)中捕获的地形;2)dem导数,诸如dta;3)单独光谱波段,例如,在非限制性示例中,红、绿、蓝、近红外、高光谱或来自卫星图像的任何其他提供的图像光谱波段;以及4)它们的导出植被和土壤指数。数据层堆栈402被组合以形成超维数据立方404。超维数据立方404被用于在406处训练人工智能预测算法,并经由人工智能无监督分类算法划定区域。
49.虽然已经描述了某些说明性实施例,但是很明显,许多替代方案、修改、排列和变化将根据前面的描述,对于本领域技术人员来说变得显而易见。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。