1.本文大体上涉及电动马达控制,并且在具体的示例中,涉及在制动期间具有减少逆电流的马达控制。
背景技术:
2.电动马达可以具有多种配置。然而,大多数马达的基本配置是带有定子和转子的旋转模型。顾名思义,定子是静止的,而转子是旋转的。旋转能量由转子和定子之间的相反磁力生成。例如,可以向定子中生成磁场的绕组施加电。当该磁场的北部在转子中的磁体的北极附近时,排斥磁力会导致转子旋转。通过改变施加到定子和转子中的一个或两个中的绕组的电流,马达可以提供连续旋转。
3.多种类型的电动马达的主要区别在于有刷和无刷之间。如果向转子中的绕组施加电能,则包括一种机制,在转子旋转时给这些绕组通电。这种机制通常包括接触转子上的电极的称为电刷的触点。电刷通常是接触电极的碳块,但出于历史原因,它们被称为电刷。当转子旋转时,不同的电极与不同的电刷接触,以生成在马达中产生扭矩所需的相反磁力。然而,由于电刷和电极系统容易磨损和机械故障,无刷马达已成为一种更流行的配置。
4.无刷马达与转子没有任何电气接触。转子包括永磁体或线圈,其中磁场由定子的磁场感应。永磁转子的使用更为常见。转矩是通过改变施加在定子中的线圈上的电流而生成的。这通常通过电子方式完成,因此可以很好地控制定子中生成的场的定时和强度。由于没有发生机械故障的电刷/电极系统,并且由于用于驱动无刷马达的电子系统可以对马达操作提供更复杂的控制,无刷马达变得越来越普遍。
5.无刷马达用于多种应用。例如,它们可用于驱动风扇(诸如吊扇)、水泵、交通工具和工业机器。在某些情况下,马达可能以与所需方向相反的方向自旋,或者必须停止。在这些情况下,马达将具有必须耗散的旋转动能。例如,如果风导致吊扇以与风扇自旋所需方向相反的方向自旋,则必须耗散风扇以相反方向自旋所产生的能量,并且必须向风扇供应能量以使风扇以所需方向自旋。
6.使马达制动或反转涉及吸收/耗散旋转马达的动能。在上述示例中,如果风以一个旋转方向吹动吊扇,并且需要以该旋转的相反方向运行风扇,则移动风扇的动能必须在某处吸收/耗散。在简单的风扇控制中,向吊扇的马达施加反向电流,以在风扇当前旋转的相反方向上施加扭矩。
7.在更复杂的马达控制系统中,诸如场定向控制(foc),施加到定子(静止)线圈的脉冲的定时被改变,以诱导所需的旋转和速度。诸如foc的控制系统在无刷马达上操作。如上所述,当使永磁式马达制动或反转时,制动或反转的动作会导致逆电流被供应回电源。如果电源是可以吸收这种能量的事物,比如电池,这不是问题。然而,例如,如果电源是dc-dc转换器或ac-dc转换器,则该反向电流可能足以损坏功率供应和/或其相关电路系统。
技术实现要素:
8.根据示例,一种方法包括在马达的场定向控制中设置参考扭矩因子(iq)信号,使得场定向控制使用调制器调制来自功率供应的功率,以向马达施加与施加到马达的动能相反的扭矩。该方法还包括在场定向控制中设置参考磁化磁通因子(id)信号,使得减少提供给功率供应的马达电流。
9.根据另一个示例,一种马达控制包括具有参考iq输入、参考id输入和线圈电流反馈输入的场定向控制,线圈电流反馈输入被配置为从至少两个电流传感器接收电流信号,至少两个电流传感器检测通过马达中的至少两个线圈的电流,场定向控制被配置为向调制器提供控制信号,该调制器调制来自施加到至少两个线圈的功率供应的功率;并且包括参考id控制器,该参考id控制器具有被配置为接收参考idc信号的参考idc输入、被配置为接收供应电流测量值的idc输入以及耦合到被配置为提供参考id信号的参考id输入的参考id输出,其中参考id控制器被配置为当idc输入指示功率从马达流向功率供应时,与参考idc输入和供应电流测量值之间的差值成比例地增加参考id信号。
10.在另一个示例中,一种马达控制系统,其适合于耦合到功率供应和具有带至少两个线圈的定子的马达,该马达控制系统包括耦合到功率供应的调制器,其中调制器控制功率从功率供应应用到至少两个线圈。马达控制系统还包括场定向控制,该场定向控制具有参考iq输入、参考id输入和线圈电流反馈输入,线圈电流反馈输入被配置为从至少两个电流传感器接收电流信号,至少两个电流传感器检测通过至少两个线圈的电流,场定向控制被配置为向调制器提供控制信号;以及参考id控制器,该参考id控制器具有被配置为接收参考idc信号的参考idc输入、被配置为接收由功率供应上的电流传感器提供的测量的供应电流的idc输入以及耦合到被配置为提供参考id信号的参考id输入的参考id输出,其中参考id控制器被配置为当idc输入指示功率从马达流向功率供应时,与参考idc输入和测量的供应电流之间的差值成比例地增加参考id信号。
11.在另一个示例中,一种方法包括在马达的场定向控制中设置参考iq信号,使得场定向控制使用调制器调制来自功率供应的功率,以在马达上施加与施加到马达上的动能相反的扭矩;以及在场定向控制中设置参考id信号,使得减小提供给功率供应的马达电流。
附图说明
12.图1是图示场定向控制(foc)的概念的框图。
13.图2是示例foc驱动电路的框图。
14.图3是示例foc系统的操作的图表。
15.图4是示例foc系统在制动期间的操作的图表。
16.图5是另一个示例foc系统在制动期间的操作的图表。
17.图6是示例foc系统的示意图。
18.图7是图示示例的foc系统的电压与时间的图表。
19.图8是示出在马达的非制动停止中施加到马达的电流与电压的图表。
20.图9是示出通过将定子线圈短路,使用主动制动来减缓图8的示例马达布置的图表。
21.图10是示出通过施加负iq以及抵消id,使用主动制动来减缓图8的示例马达布置的
图表。
22.图11是示例过程的过程流程图。
23.图12是示例场定向控制的操作的过程流程图。
具体实施方式
24.在附图中,相同的附图标记和其他附图标号用于图示相同或类似(功能和/或结构)的特征。附图不一定按比例绘制。
25.图1是图示场定向控制(foc)的概念的示意图。马达100包括具有三个固定绕组的定子101:绕组102、绕组104和绕组106。每个绕组在金属磁芯周围:分别为磁芯103、磁芯105和磁芯107。组合绕组和磁芯分别包括电磁体a、b和c。在该示例中,绕组102、绕组104和绕组106围绕旋转轴线108定位,彼此间隔120度。即,绕组104与绕组102成120度,绕组106与绕组104成120度,以及绕组102与绕组106成120度。在其他示例实施例中,附加的定子/绕组包括在马达100中。在这些示例实施例中,角度定位取决于马达中所包括的定子/绕组的数量。定子101相对于转子110静止,转子110围绕旋转轴线108旋转。在该示例中,转子110包括永磁体112,永磁体112的北极标记为n,并且永磁体112的南极标记为s。在其他示例中,转子110包括两个或更多个永磁体。
26.电流被施加到绕组102、绕组104和绕组106。通过对施加到绕组102、绕组104和绕组106的电流的脉冲进行定时,施加力以旋转转子110。例如,在图1所示的位置中,向绕组102施加电流,产生通过磁芯a的磁场,磁芯a的北极指向转子110。因此,从绕组102施加的磁场的北极与永磁体112的北极相反。这会产生使转子110逆时针旋转的力。随着永磁体112的北极旋转离开绕组102,绕组102的北极向永磁体112的南极提供吸引力。然而,在穿过永磁体112的南极的中心旋转经过绕组102后,对绕组102的吸引力将以相反的旋转方向拉动。通过停止或反转绕组102中的电流可以避免这种情况。在一些示例中,绕组102中的电流被反转而不是停止,使得通过绕组102的反向电流产生的磁场的南极进一步旋转转子110。绕组102、绕组104和绕组106中的电流脉冲的定时和持续时间在转子110上产生选定的旋转力。当马达100通电且转子110移动时,绕组102、绕组104和绕组106向转子110施加旋转力q和与q正交的力d。实际上,d力在马达100中表现为热量,因此将d力最小化,以将未用于旋转转子的浪费能量最小化。如下文进一步所述,q和d是由定子电磁体a、b和c提供的转子的坐标系中的力的总和,使用克拉克(clarke)变换和帕克(park)变换(下文进一步讨论)进行变换,以将这些力首先从定子坐标系中的三个向量变换为定子坐标系(克拉克变换)中的两个(α和β),然后变换为转子坐标系(帕克变换)中的向量d和q。
27.图2是示例foc驱动电路200的示意图。在foc驱动电路200中,电源202提供功率以旋转马达204。在该示例中,电源202是dc-dc功率转换器。在其他示例中,电源202是电池、ac-dc转换器或另一电源。在该示例中,马达204包括三个定子绕组,例如绕组102(图1)、绕组104(图1)和绕组106(图1)。第一驱动线206是驱动马达204的第一定子的导体对。在该示例中,第一驱动线206被标记为线“a”。第二驱动线208是驱动马达204的第二定子的另一导体对。在该示例中,驱动线标记为线“b”。第三驱动线210是驱动马达204的第三定子的另一导体对。在该示例中,第三驱动线210标记为线“c”。马达204由电源202通过调制器(诸如三相电桥212)、第一驱动线206、第二驱动线208和第三驱动线210驱动。三相电桥212受信号
ma、mb和mc的控制。
28.在该示例中,通过三个线圈(例如绕组102、104和106)的电流由第一电流传感器214、第二电流传感器216和第三电流传感器218检测。电流检测器214、216和218分别检测电流信号ia、ib和ic,它们是表示通过三个定子线圈的电流的线圈电流反馈信号,在本示例中,这三个定子线圈的示例为绕组102(图1)、绕组104(图1)和绕组106(图1)。在其他示例中,使用两个电流传感器来检测通过三个定子线圈中的两个的电流。注意,在该示例中,除了从电源202到三相电桥212、第一驱动线206、第二驱动线208和第三驱动线210中的每一个的耦合之外,foc驱动电路200中的每一个信号都是表示数值的数字信号。这些数字信号可以并行、串行或以用于传输数字信号的多种方式传输。
29.电路220执行克拉克变换(例如,将三相马达的时域分量(诸如电流ia、ib和ic)转换为两相正交定子帧(例如固定坐标定子相位)中的电流值),并且可以使用处理器、数字电路系统、状态机或其他电路系统来实施。电流ia、ib和ic指示三相中的马达中的力。电路220将这些电流值转换为电流值i
α
和i
β
(例如,静止坐标系中的等效信号)。从数学上讲,这种转换遵循等式1和等式2。
[0030][0031][0032]
这些值表示从三相系统转换为静止两相系统的定子电流。因此,为了将这些值转换为表示转子坐标系中的转子上的力(iq和id)的值,需要转子的旋转平面的角位置θ。速度和位置估计器电路系统222使用i
α
、i
β
、v
α
和v
β
来确定角位置信号θ和旋转速度ω。对于速度和位置估计的示例,请参阅driss yousfi,abdallah darkawi的“comparison of two position and speed estimation techniques used in pmsm sensorless vector control”(第四届关于电力电子、机器和驱动器的iet国际会议(pemd 2008),2008年4月,英国大约克,第626-630页),其通过引用并入本文。下文讨论了v
α
和v
β
的确定。
[0033]
速度和位置估计器电路系统222的输出之一是转子的估计角位置θ。帕克变换电路系统224(使用例如处理器、状态机、数字电路系统和/或其他电路系统实施)使用等式3和等式4从i
α
、i
β
和θ确定iq信号(iq)和id信号(id)。
[0034]iq
=i
β
cosθ-i
α
sinθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0035]
id=i
β
sinθ i
α
cosθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0036]
foc驱动电路200接收由用户或其他速度选择电路系统(未示出)选择的参考旋转速度ω
ref
,其是期望或选择的速度。第一组合器226将参考旋转速度ω
ref
与由速度和位置估计器电路系统222提供的估计旋转速度ω的负值相加,以确定马达204的期望旋转速度和实际速度的估计值之间的差值。第一比例积分器228对第一组合器226的输出进行积分,并成比例地调整积分输出的幅值,以提供参考iq信号(i
qref
)(即,将积分的输出乘以固定量,使得输出与该变量所需的范围匹配),其表示扭矩电流iq的变化,以实现所需的速度。第二组合器230在参考iq输入231上接收i
qref
,并将i
qref
与帕克变换电路系统224提供的iq的负值求和,以提供组合的iq信号。第二比例积分器232对第二组合器230的输出进行积分,并调整比例以提供vq信号,该信号表示提供马达达到所期望的速度所需的调整扭矩所需的电压。
[0037]
foc驱动电路200在参考id输入235上接收d维度的选定参考id信号(i
dref
),该d维度与q维度正交,其是施加的力中不在马达中产生扭矩的部分。在某些马达中,由于马达的配置,该值将为零或小于零。这是理想的,因为施加到马达上的所有电流(iq)都会产生扭矩。在其他马达中,id必须大于零才能适当操作马达。适当的id电平取决于马达配置以及该马达配置的id和iq的最有效组合是什么。第三组合器234将i
dref
与id的负值组合以提供组合的id信号。第三比例积分器236对第三组合器234的输出进行积分,并调整比例以提供表示d维中的调整电平的vd信号,以用于马达的高效操作。
[0038]
帕克逆变换电路系统238(使用例如处理器、状态机、数字电路系统和/或其他电路系统实施)接收vq、vd和θ,并根据等式5和等式6提供v
α
信号和v
β
信号。
[0039]vα
=vdcosθ-vqsinθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0040]vβ
=vdsinθ vqcosθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)这些信号表示在双向量(α和β)定子坐标系中由电磁体a、b和c施加的电压。克拉克逆变换电路系统240(使用例如处理器、状态机、数字电路系统和/或其他电路系统实施)接收v
α
、v
β
和由电压传感器242(其测量电源202的电压)提供的测量的电压或测量的电压供应信号(v
dc
),并根据等式7-9提供调制信号(ma、mb和mc)。
[0041]
ma=m(v
α
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0042][0043][0044]
其中m是v
dc
的函数,并将等式(7)、(8)和(9)的括号内的值转换为由三相电桥212通过第一驱动线206、第二驱动线208和第三驱动线210应用于驱动马达204的脉冲宽度的时间值。因此,三相电桥212用于调制对马达的功率应用,从而改变转子110的速度和方向。(参见德克萨斯仪器股份有限公司,“clarke&parke transforms on the tms320c2xx”,bpra048,1997),https://www.ti.com/lit/an/bpra048/bpra048.pdf,其全文通过引用并入本文。)
[0045]
在图2的示例中,马达204的制动或反转可能会导致一些问题。如上所述,使如带有永磁体的马达204的马达制动或反转通过三相电桥212将逆电流提供回电源202。如果电源202可以是可以吸收这种能量的电源,比如电池,这不是问题。然而,例如,如果电源202是dc-dc转换器或ac-dc转换器,则该反向电流可能足以损坏电源202和/或其相关电路系统。
[0046]
图3是在示例foc系统的操作中应用和使用的能量的图表300。在图表300中,马达(诸如马达204(图2))正在逆时针或反时针方向转动,如箭头302所示。轴线304是d轴线,轴线306是q轴线。因此,图表300是dq正交系统的图表。向量307(v)是施加在马达上的电压。q相中的电流为iq,如向量305所示。向量309是反emf(bemf),即旋转速度ω乘以q相中的马达电感lq和iq。向量e(如向量308所示)是由于该示例中的转子的永磁体而产生的bemf。向量308形成直角三角形的一条边,其中第二条边的值为ωl
qiq
,并且斜边的值为v。基于图表300,电流iq与bemf同相,以保持转子的旋转。
[0047]
图4是示例foc系统在制动期间的操作的图表400(例如,驱动电流iq以与bemf相反的方向示出)。d轴线404是q/d坐标系的d维度。q轴线406是q/d坐标系中的q维度。在该示例
中,箭头402图示转子正在以逆时针旋转移动。该旋转不是由马达驱动的。该旋转是由于马达之前的操作(例如,当风扇在驱动后继续自旋)或外力(诸如风使吊扇自旋)造成的。为了制动马达(例如,停止风扇自旋),施加信号iq以在旋转的相反方向上提供力,如向量405所示。所施加的电压v(如向量407所示)形成三角形的斜边,其中向量408(e)在q轴线上,并且向量409(ωl
qiq
)在图3的相反方向,因为iq具有相反的极性。负iq指示正在发生制动动作。如果在制动期间,马达以与所需旋转方向相反的方向转动(该转动由马达转换为反向电流),如果功率供应可以吸收动能,则没有问题。然而,对于许多功率供应,诸如dc-dc转换器,该能量可能会导致电压尖峰,该电压尖峰能够损坏功率供应或其他电路内的电路。
[0048]
图5是另一示例foc系统在制动期间的操作的图表500。d轴线504是q/d坐标系的d维度。q轴线506是q/d坐标系中的q维度。在该示例中,箭头502示出了转子110的逆时针旋转。然而,如图4的示例所示,旋转来自马达的先前操作或外力,诸如风使吊扇自旋。为了制动马达,马达控制器(例如,foc驱动电路200(图2))响应于用户输入而施加信号iq,如向量505所示,以提供与旋转方向相反的力。与图4的示例不同,如沿d轴线所示,由马达控制器(下文将进一步解释)施加如向量512所示的附加信号id。信号id在向量509(ωl
qiq
)和向量507(v)之间添加ωldid的附加向量510,信号id垂直于q轴线506,因为向量510(ωldid)表示的功耗与向量509(ωl
qiq
)表示的功耗正交。因此,向量508(e)相对于向量408(图4)较小。此外,向量512(id)沿正d轴线,其表示施加到马达的正电流,但不表示施加到马达的附加扭矩。另一方面,信号iq沿负q轴线,其表示施加到马达的负电流,并表示施加到马达的负扭矩。通过选择抵消iq的id,可以将从bemf施加到电源的净电流减少到接近零,同时向马达施加必要的制动扭矩。这可以避免功率供应的电流尖峰,该电流尖峰能够损坏某些功率供应。增加id会暂时减缓马达的效率,因此马达的动能在马达中以热量而不是反向电流的形式耗散到功率供应。在制动期间,当id接近零时,进出电池的功率如等式10所示。
[0049]
po=e*iqꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)由于iq为负,因此向功率供应提供功率。就foc输入而言,输入到马达的功率为等式11。
[0050]
p
in
=vdid v
qiq
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)为了使p
in
大约等于零,将vdid设置为大约vq(-iq)。将p
in
设置为大约零是理想的,因为这意味着没有向功率供应供应功率。然而,在实际示例中,p
in
被设置为正值(功率供应正在提供功率),使得由于控制回路或任何其他实际限制引起的任何干扰将被从电源中提取的额外功率的缓冲器吸收。
[0051]
图6是示例foc系统600的示意图。在该示例中,foc系统600包括foc控制器660(控制三相电桥612)和参考id控制器662。在一些示例实施例中,foc控制器660和参考id控制器662形成在单个半导体衬底上,并且在其他示例实施例中,它们形成在不同的半导体衬底上。在其他实施例中,控制器660、控制器662和/或三相电桥612形成在同一半导体封装中和/或同一半导体衬底上。在其他示例中,foc控制器660和/或参考id控制器662使用一个或多个通用处理器、状态机、数字电路系统、查找表和/或软件元件或前述的硬件/软件实施方式来实施。电源602是电源202(图2)的示例。电源602可以包括具有或不具有功率转换电路系统的交流电(ac)或直流电(dc)电源。马达604是马达204(图2)的示例。在一些示例实施例中,马达604是三相马达。在一些示例实施例中,马达604是直流马达(例如有刷或无刷马达)
或交流马达(例如感应马达)。三相电桥612是三相电桥212(图2)的示例。第一驱动线606是第一驱动线206(图2)的示例。第二驱动线608是第二驱动线208(图2)的示例。第三驱动线610是第三驱动线210(图2)的示例。第一电流传感器614是第一电流传感器214(图2)的示例。第二电流传感器616是第二电流传感器216(图2)的示例。第三电流传感器618是第三电流传感器218(图2)的示例。电路620是电路220(图2)的示例。速度和位置估计器622是速度和位置估计器电路系统222(图2)的示例。帕克变换电路系统624是帕克变换电路系统224(图2)的示例。第一组合器626是第一组合器226(图2)的示例。第一比例积分器628是第一比例积分器228(图2)的示例。第二组合器630是第二组合器230(图2)的示例。第二比例积分器632是第二比例积分器232(图2)的示例。第三组合器634是第三组合器234(图2)的示例。第三比例积分器636是第三比例积分器236(图2)的示例。帕克逆变换电路638是帕克逆变换电路系统238(图2)的示例。克拉克逆变换电路系统640是克拉克逆变换电路系统240(图2)的示例。电压传感器642是电压传感器242(图2)的示例。
[0052]
与图2的示例实施例不同,图6的示例实施例包括参考id控制器662,该参考id控制器包括在参考i
dc
输入656上的参考i
dc
信号(i
dc\u ref
)输入和感测或计算的电流i
dc
输入。参考i
dc
输入656是从在马达604的实验操作期间确定的功率供应预期的最小电流。输入i
dc
信号(i
dc
)是使用例如相位电流ia、ib和/或ic估计的供应电流值,或从电流传感器652感测的供应电流值。组合器650将i
dc_ref
(输入656)与i
dc
(输入658)的负值组合。电流传感器652连续监测从电源602到马达604的电流。如果电流传感器652检测到负电流(即,从马达604向电源602提供电流),则组合器650通过比例积分器654向第三组合器634提供更高的参考id输出信号(i
dref
)或组合的i
dref
信号。第三组合器634将i
dref
与id组合以提供大约抵消来自提供给电源602的马达604的能量的输出。因此,组合器650不是简单的组合器,而是仅在i
dc
为负时充当组合器。如果i
dc
为正,则组合器650简单地传递i
dc_ref
。以这种方式,当需要缓解从马达604到电源602的电流时,调制i
dref
以增加vd。
[0053]
图7是图示了没有和具有增加的id的示例foc系统的图表700。图表700具有竖直轴线702,示出了以伏特为单位的测量值。线704示出了第一风扇(未示出)的定子线圈上的复合电压(即,所有线圈电压彼此叠加)。线706示出了在第一风扇的功率供应两端电压。第二风扇(未示出)放置在第一风扇附近,并且用于使第一风扇在时间708之前以已知速度自旋。在时间708期间,id不响应于负功率供应电流而增加。在时间714期间,id响应于负功率供应电流而增加,如上文关于图6所解释的。在时间708处,用信号iq启动第一风扇的马达,以使第一风扇以与由第二风扇引起的初始已知速度相反的方向自旋。在时间710处,第一风扇反转并开始以相反方向自旋。当风扇处于反转过程中时,电压尖峰712示出电压增加。在时间708处,id保持在恒定的低值。电压尖峰712图示了电压从功率供应的标称24伏增加到40伏。这16伏电压的增加很容易损坏一些功率供应。
[0054]
在时间714处,第一风扇再次被第二风扇自旋到已知速度。在时间714处,施加与时间708处所施加的相同iq。然而,id增加以抵消风扇的动能。在线706上的点716图示了功率供应处的电压没有显著增加。
[0055]
图8是示出了在马达的非制动停止位置处施加到马达的电流和电压的图表800。也就是说,不向马达施加能量,并且允许马达自旋到停止位置。该图与图9的被动制动和图10的主动制动进行了比较。轴线802示出所有马达线圈同时汲取的电流。线804是通过定子线
圈的电流的组合(即,通过所有线圈的相互叠加的电流),并且线806是功率供应处的电压。非零电压指示马达仍在自旋。在时间808处,iq设置为零,并且马达在时间810自旋低至零转。使用此实验马达布置,该时间大约为11.4秒。
[0056]
图9是示出通过将定子线圈短路并施加信号,使用主动制动来减缓马达的图表900,如参考图8所述。在该示例中,功率调制器中包括特殊模式(诸如三相电桥612(图6))以使马达(诸如马达604(图6))的定子线圈短路以向马达提供制动。轴线902以安培为单位示出电流。线904是马达中的定子的合成电流。在时间908处,马达的定子短路。在时间910处,马达停止。线906是时间908和时间910之间的时间的展开视图。图表900示出了与参考图8讨论的系统中的11.4秒相比,马达停止的时间减少到大约2.24秒。图表900还示出了峰间(peak-to-peak)制动电流大约为5.68安培。如图表900所示,该峰间制动电流大于马达的正常工作电流,这可能会对马达和驱动mosfet造成附加的应力。
[0057]
图10是示出通过施加负iq以及抵消id(而不是如图8所示的被动制动或如图9所示的主动制动),使用主动制动来减缓马达的图表1000。与图表900(图9)一样,轴线1002示出安培数。线1004示出了通过定子线圈的复合安培数。在时间1008处,根据上文关于图6解释的原理,使用具有抵消id的负iq施加制动。线1006是时间1008和时间1010之间的时间的展开视图。停止马达的时间大约为2.95秒,类似于图9中所示的停止时间。然而,最大峰间制动电流仅大约为2.5安培,其在马达的正常工作范围内。因此,使用由负iq和抵消id施加的停止力提供与短路定子线圈大致相同的停止功率,同时向定子线圈施加显著较小的应力,并避免与图9中的主动制动一起使用将线圈短路所需的附加电路系统。
[0058]
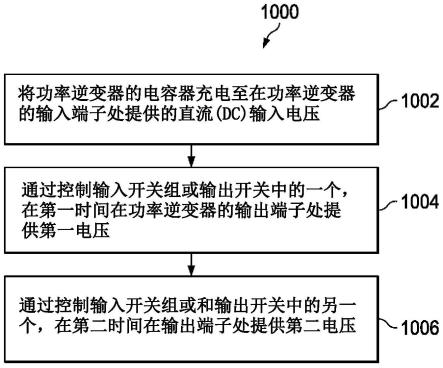
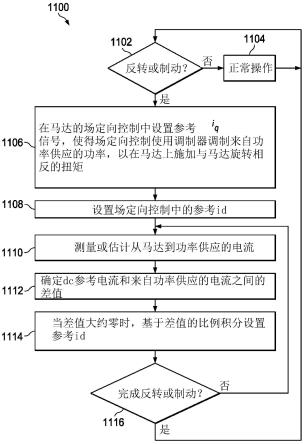
图11是示例过程1100的过程流程图。在步骤1102中,确定电流控制命令是否涉及马达的反转或制动。如果否,则步骤1104为马达的正常操作。如果是,则过程1100进行到步骤1106,该步骤在马达的场定向控制中设置参考iq信号(例如,通过比例积分器628),使得场定向控制使用调制器调制来自功率供应的功率,以在马达上施加与马达旋转相反的扭矩。在该示例中,场定向控制是场定向控制器660(图6)的示例。在该示例中,三相电桥612(图6)的示例调制功率。在该示例中,功率供应是图6中的电源602的示例。在该示例中,马达是马达604(图6)的示例。步骤1108是提供或设置参考id。步骤1110是测量或估计从马达到功率供应的电流。在一个示例中,这是由电流传感器652完成的(图6)。步骤1112是确定dc参考电流和来自功率供应的电流之间的差值。组合器650(图6)是用于确定该差值的设备的示例。步骤1114是在场定向控制中设置参考id信号,以便最小化由马达供应给功率供应的任何逆电流。比例积分器654是用于确定比例积分的设备的示例。步骤1116确定反转或制动是否完成。如果答案是否定的,则过程环返回到步骤1110。如果答案是肯定的,则过程环返回到步骤1102。
[0059]
图12是示例场定向控制的操作的过程流程图。场定向控制过程1200是步骤1106(图11)中使用的场定向控制的示例,并且是场定向控制器660(图6)的操作的过程的示例。步骤1202涉及测量通过马达的至少两个定子线圈的至少两个线圈电流。马达的示例是马达604(图6),并且线圈电流可以包括ia、ib和ic。在步骤1204中,使用克拉克变换(例如,通过电路620)将至少两个线圈电流变换为i
α
信号和i
β
信号。在步骤1206中,使用帕克变换和马达中的转子的角度位置将信号i
α
和i
β
变换为iq信号和id信号。在示例中,帕克变换电路系统624(图6)的示例执行该变换步骤。步骤1208是将iq信号与参考iq信号组合以产生组合的iq信
号。在示例中,诸如第二组合器630(图6)的示例组合器执行该组合。步骤1210是对组合的iq信号进行积分以产生vq信号。在示例中,第二比例积分器632(图6)执行该积分和比例调整。步骤1212将id信号与参考id信号组合以产生组合的id信号。在示例中,第三组合器634执行该组合。步骤1214是对组合的id信号进行积分以产生输入vd信号。在示例中,第三比例积分器636(图6)执行该步骤。步骤1216是使用帕克逆变换利用转子的角度位置将vq信号和vd信号变换为v
α
信号和v
β
信号。在示例中,帕克逆变换638执行该步骤。步骤1218是使用克拉克逆变换将v
α
信号和v
β
信号变换为调制器的控制信号。在示例中,克拉克逆变换电路640执行该步骤。
[0060]
被“配置为”执行任务或功能的设备可以由制造商在制造时配置(例如,编程和/或硬接线)以执行该功能和/或可以由用户在制造后配置(或重新配置)以执行该功能和/或其他附加或替代功能。配置可以通过设备的固件和/或软件编程、通过设备的硬件部件和互连的构造和/或布局,或其组合。
[0061]
如本文所用,术语“端子”、“节点”、“互连”、“引脚”和“引线”可互换使用。除非另有明确说明,否则这些术语通常用于表示设备元件、电路元件、集成电路、设备或其他电子设备或半导体部件之间的互连或其终端。
[0062]
在本说明书中,术语“组合器”是将两个或更多个信号组合成一个组合信号的设备。如本文所描述的“组合器”可以将两个或更多个信号组合成单个输出,或者“组合器”可以简单地将输入信号中的一个传递到输出,而不将其与其他输入信号组合。
[0063]
本文中描述为包括某些部件的电路或设备可以替代为适于耦合到这些部件以形成所描述的电路系统或设备。例如,描述为包括一个或多个半导体元件(诸如晶体管)、一个或多个无源元件(诸如电阻器、电容器和/或电感器),和/或一个或多个源(诸如电压和/或电流源)的结构可以替代地仅包括单个物理设备(例如半导体管芯和/或集成电路(ic)封装)内的半导体元件,并且可以适于耦合到至少一些无源元件和/或源以(例如,由终端用户和/或第三方)在制造时或制造后形成所描述的结构。
[0064]
虽然本文描述了特定晶体管的使用,但也可以使用其他晶体管(或等效设备)。例如,可以使用p型金属氧化物硅场效应管(“mosfet”)代替n型mosfet,而电路几乎没有变化或没有变化。此外,可以使用其他类型的晶体管(例如双极结晶体管(bjt))、漏极扩展mosfet(p型或n型)或其他类型的结晶体管和/或场效应晶体管。
[0065]
本文所描述的电路可重新配置,以包括更换的部件,以提供至少部分类似于部件更换之前可用的功能的功能。除非另有说明,否则示出为电阻器的部件通常代表串联和/或并联的任何一个或多个元件,以提供由所示电阻器表示的阻抗量。例如,本文所示和描述为单个部件的电阻器或电容器可以替代的是分别在相同节点之间并联耦合的多个电阻器或电容器。例如,本文所示和描述为单个部件的电阻器或电容器可以替代的是分别串联耦合在与单个电阻器或电容器相同的两个节点之间的多个电阻器或电容器。
[0066]
除非另有说明,否则值之前的“约”、“大约”或“基本上”意旨所述值的 /-10%。在权利要求的范围内,在所描述的示例中可以进行修改,并且其他示例是可能的。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。