一种全极化sar图像舰船检测方法
技术领域
1.本发明涉及合成孔径雷达目标检测识别技术领域,更具体地说,特别涉及一种联合目标散射特性与极化波各向异性的全极化sar图像舰船检测方法。
背景技术:
2.合成孔径雷达(synthetic aperture radar,sar)以其不受天气条件影响,能全天候昼夜成像的独特优势,在对地观测技术中占据重要地位。利用sar图像进行舰船检测识别在商业、渔业、船舶交通服务和军事部门等领域有许多潜在应用,尤其是对海上交通管制、非法捕鱼、船只非法入侵、海洋环境监测等方面起着重要作用。sar图像舰船检测的难点主要包括:(1)sar图像成像机理、成像场景海况复杂,目标与海洋背景特性难以表征;(2)对于海洋杂波背景,受海上风速、海浪等环境因素影响,难以利用传统的统计模型描述杂波的统计特性;(3)对于尺寸小的舰船,在复杂海洋背景下,难以有效监测。sar图像中包含了大量的杂波背景,舰船相对于海洋仅仅只是很微小的一部分,并且由于海洋风速、海浪等自然环境的影响,使得舰船检测异常困难。
3.近年来,随着卫星技术的不断发展,从最初的单极化模式到现在的多极化模式,sar图像中包含的信息越来越丰富,特别是在全极化sar数据中,包含了丰富的极化信息,在舰船检测中发挥出了巨大的优势。同时,丰富的极化信息也意味着杂波背景凸显,主要表现在噪点突出。在这种情况下,传统的检测器如span、pms等不再适用于全极化sar图像舰船检测,迫切需要一种适用于全极化sar图像的舰船检测器。dbsp检测器作为近年来优秀的sar图像舰船检测器,考虑了每个像素周围八邻域的信息,对每个像素构造了一个极化协方差差分矩阵,然后利用该矩阵进行四分量分解,将总功率分解为镜面散射、双跳散射、体散射和螺旋散射功率之和。对于dbsp检测器,利用双跳散射与体散射之和乘以螺旋散射,并舍去镜面散射,即构成了dbsp检测器。dbsp检测器在全极化sar数据上均表现出优异的检测效果,但是仍然存在一些不足。例如,dbsp检测器仅仅考虑了舰船的散射特性,换句话说,dbsp是一种散射特性占优的方法。一方面,当某一舰船构造简单,主要表现为镜面散射时,dbsp检测器很容易对这类舰船产生漏检;另一方面,极化协方差差分矩阵的构造依赖于中心像素与周围八邻域像素的差异性,也就是说,当舰船像素与周围像素的散射差不明显时,中心像元的值可能会非常小,最终导致检测器的值也非常小,从而失去对舰船的检测能力。
4.为此,有必要开发一种联合目标散射特性与极化波各向异性的全极化sar图像舰船检测方法来克服上述技术问题。
技术实现要素:
5.本发明的目的在于提供一种全极化sar图像舰船检测方法,以克服现有技术所存在的缺陷。
6.为了达到上述目的,本发明采用的技术方案如下:
7.一种全极化sar图像舰船检测方法,包括以下步骤:
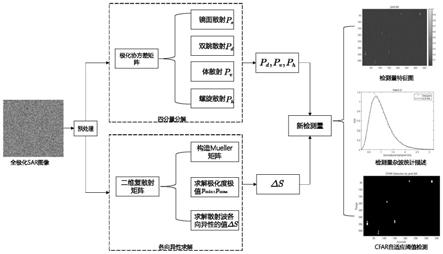
8.s1、对全极化sar图像进行预处理,得出每个像元不同类型的散射功率和极化波各向异性参数;
9.s2、利用分解出的不同散射功率并结合极化波各向异性参数,构造全极化sar图像检测器;
10.s3、利用广义伽马分布描述全极化sar图像检测器的统计特性,实现该全极化sar图像检测器的恒虚警率自适应检测。
11.进一步地,所述步骤s1包括:
12.s10、提取全极化sar图像的极化信息,求取极化协方差矩阵,随后利用协方差矩阵对每个像元进行散射功率四分量分解;
13.s11、利用二维复数散射矩阵,构造mueller矩阵,随后求解极化度的极大、极小值,利用极化度的极值求得极化波各向异性。
14.进一步地,所述步骤s10具体为:
15.利用极化信息求出极化协方差矩阵c,其中c=k
·k*t
。接着,利用协方差矩阵进行散射功率的四分量分解,分解公式如下式:
[0016][0017]
公式中的参数a,b,c,d,e由确定,则ps=fs(1 |β|2),pd=fd(1 |α|2),pv=fv,ph=fh,且ps,pd,pv和ph满足p
t
=ps pd pv ph=span;
[0018]
进一步地,所述步骤s11具体为:
[0019]
首先、利用二维复数散射矩阵对每一个像元构造对应的mueller矩阵,mueller矩阵的表达式如下:
[0020][0021]
m=rwr-1
[0022]
其中,
[0023]
然后、利用mueller矩阵求取极化度的极值,即p
min
和p
max
,根据s(p)=-ln(s(p))求得极化度的极值,其中
[0024]
最后、利用δsn=sn(p
min
)-sn(p
max
),求得极化波各向异性的值。
[0025]
进一步地,所述步骤s3具体包括:
[0026]
s31、利用广义伽马分布描述杂波背景的统计特性;
[0027]
s32、利用广义伽马分布估计检测量的阈值,以实现全极化sar图像的自适应检测.
[0028]
进一步地,所述步骤s32具体为:
[0029]
利用广义伽马分布gγd表征全极化sar图像检测器在海洋场景中的统计行为,以实现在不同场景中的cfar自适应检测,所述利用广义伽马分布gγd的概率密度函数公式为:
[0030][0031]
其中σ,v表示尺度参数,幂,形状,γ(
·
)表示gamma函数。
[0032]
进一步地,所述步骤s32中检测量的阈值计算公式为:
[0033][0034]
其中,γ-1
(
·
,
·
)表示逆不完全函数,p
fa
为虚警概率的给定值。
[0035]
与现有技术相比,本发明的优点在于:本发明利用舰船目标的散射特性与散射波的各向异性,能够充分表征舰船目标,以实现强化舰船,弱化背景的目的,以便于能够从复杂的海洋背景中检测出舰船。
附图说明
[0036]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0037]
图1是本发明全极化sar图像舰船检测方法的具体流程图。
[0038]
图2是本发明中广义伽马分布杂波拟合图。
[0039]
图3中a本发明中为大场景pauli分解图,b为joint-sa特征图
[0040]
图4中a为本发明中pauli分解图,b为该区域的三维可视化图。
[0041]
图5中a为本发明中检测量对应的特征图,b为本发明中的检测量。
[0042]
图6中a为本发明中dbsp检测器的检测结果,b为检测器joint-sa的检测结果。
具体实施方式
[0043]
下面结合附图对本发明的优选实施例进行详细阐述,以使本发明的优点和特征能
更易于被本领域技术人员理解,从而对本发明的保护范围做出更为清楚明确的界定。
[0044]
参阅图1所示,为了准确检测复杂海洋背景下的舰船目标,克服现有检测器无法有效表征舰船目标特性的弊端,本实施例主要考虑舰船目标的散射特性与散射波的各向异性,首先对舰船目标的散射功率进行四分量分解(镜面散射、双跳散射、体散射、螺旋散射),然后利用二维复数矩阵求解散射波各向异性的值,最后利用乘性法则将保留的散射功率与各项异性值相乘,获取最终的能描述舰船特性的检测量。
[0045]
本实施例公开了一种联合目标散射特性与极化波各向异性的全极化sar图像舰船检测方法,具体包括以下步骤:
[0046]
步骤s1、对全极化sar图像进行预处理,得出每个像元不同类型的散射功率和极化波各向异性参数,具体包括:首先、提取全极化sar图像的极化信息,求取极化协方差矩阵,随后利用协方差矩阵对每个像元进行散射功率四分量分解;然后、利用二维复数散射矩阵,构造mueller矩阵,随后求解极化度的极大、极小值,利用极化度的极值求得极化波各向异性。
[0047]
本实施例中,通过中国高分3号卫星获取的c波段全极化sar图像数据,首先对图像进行预处理,主要为滤波操作。全极化sar测量目标完整的后向散射信息,能够全面的表征目标散射功率,通常使用二维复数散射矩阵[s]来表征图像中每个像素单元的信息,定义为:
[0048][0049]
或者等价地表示为一个散射向量:
[0050][0051]
式中trace(
·
)为矩阵对角线元素的和,是在厄米特内积下的2x2基矩阵的完整集合。最后可以将散射机制定义为一个归一化的向量ω=k/|k|。
[0052]
通常情况下,sar观测到的目标并不是理想的散射机制,而是不同对象的组合,一般称之为部分目标。为了表征一个局部目标,单一的散射矩阵是不够的,因此本实施例引入散射矩阵的二阶统计量。在此情况下,可估计目标的协方差矩阵,假设该散射向量矩阵满足互易性定理,即则协方差矩阵可表示为:
[0053][0054]
其中,《
·
》表示空间平均,“*”表示复共轭。协方差矩阵的功率定义为:
[0055]
span=c
11
c
12
c
13
[0056]
接着利用协方差矩阵对每个像元进行四分量分解以及利用二维复数散射散射矩阵对散射波各向异性进行求解。
[0057]
第一、利用协方差矩阵c进行四分量分解,其分解表达式如下:
[0058][0059]
公式中的参数a,b,c,d,e由来确定,则ps=fs(1 |β|2),pd=fd(1 |α|2),pv=fv,ph=fh,且ps,pd,pv和ph满足p
t
=ps pd pv ph=span。
[0060]
第二、求解散射波各向异性:
[0061]
首先利用二维复数散射矩阵,构造muller矩阵,其表达式如下列公式所示:
[0062][0063]
m=rwr-1
[0064]
其中,
[0065]
然后利用mueller矩阵求取极化度的极值,即p
min
和p
max
。
[0066]
再引入了一种利用极化度来度量极化波的熵值s,其表达式如下:
[0067]
s(p)=-ln(s(p))
[0068]
其中,由公式可以看出极化波的熵值s只依赖于极化度p,与极化状态无关,且该值满足s(p=1)≤s≤s(p=0)。当散射波为完全极化波时,熵s为0,而当散射波为完全非极化波时为1,即p=0。熵δsn的动态范围与极化度δp的动态范围直接相关,因此可以为散射机制的复杂性提供一种度量方式。由此可以引出散射波极化各向异性的表达式:
[0069]
δsn=sn(p
min
)-sn(p
max
)
[0070]
因此,可利用上式来表征目标的非平稳性:δsn值越高,信号随发射接收极化的变化越大,且已证明该度量是一种能够提高船海对比的有效工具。
[0071]
步骤s2、利用分解出的不同散射功率并结合极化波各向异性参数,构造全极化sar图像检测器,具体为:
[0072]
再步骤s1中已经求解出四种散射功率(镜面散射ps,双跳散射pd,体散射pv,螺旋散射ph)和散射波各向异性的值,因此,可以构造一个新的检测器,其表达式如下:
[0073]
joint-sa=(pd pv)
·
ph·
δs
[0074]
根据该检测量,对舰船目标与海杂波的特性进行可视化描述,如图3所示,图中明亮部分即为对应的舰船,而较暗部分则为海杂波背景。可以看出,利用上述检测量,不但能有效的突出舰船目标,而且对海杂波的压制效果也十分突出。
[0075]
为了更进一步的展示上述检测器的优势,在本实施例中选择了一快仅包含一个弱散射目标小范围区域,如图4所示,对该区域进行三维可视化。图4(a)为pauli分解图,从图中可以看出中间明亮区域为舰船目标;图4(b)为该区域的三维可视化图,中间凸起部分即为弱散射目标,可以直观的看出,杂波背景的值均在0到0.1之间,而弱散射目标的峰值在0.6左右。因此,可以证明本发明中的检测量对弱散射目标的突出与背景的压制是十分有效的。
[0076]
步骤s3、利用广义伽马分布描述全极化sar图像检测器的统计特性,实现该全极化sar图像检测器的恒虚警率自适应检测。
[0077]
在定义好全极化sar图像检测器之后,需要利用分布模型表征新的检测器在海洋场景中的统计行为,以实现在不同场景中的cfar自适应检测。在本实施例中采用gtd的统计分布来表征joint-sa的统计量。使用gtd的原因在于它已经被广泛应用于不同领域,并且也被证明是描述海杂波统计行为的有效方法,其概率密度函数(pdf)为:
[0078][0079]
其中,σ,v表示尺度参数,幂,形状,γ(
·
)表示gamma函数。虽然伽马分布是一个经验模型,但它也被证明是相对通用的。因此,检测阈值可以表示为:
[0080][0081]
其中,γ-1
(
·
,
·
)表示逆不完全函数,p
fa
为虚警概率的给定值。
[0082]
从图2可以看出,在本发明的检测量下,广义伽马分布可以有效的描述海杂波的统计行为特性,因此可以用来对本发明中的检测量进行自适应估计。在利用广义伽马分布估计出阈值之后,利用该阈值进行cfar的自适应检测,如图5所示,图5(a)为本发明中检测量对应的特征图,图5(b)为利用本发明中的检测量,利用cfar自适应检测技术对应的检测结果。从图中可以看出,针对本发明中的检测量,cfar自适应检测技术能够有效检测出所选区域中的舰船,并且无漏检和虚警。
[0083]
为了更进一步说明本发明中检测量的优越性,将本发明中的检测量与其他检测量进行对比,如图6所示。图6(a)为dbsp检测器的检测结果,从图中可以看出dbsp虽然成功检测出了舰船,但同时出现了漏检和虚警,而本发明中的检测结果既成功检测出了舰船,又无虚警和漏检。因此,可以证明本发明中的检测方法优于其他检测方法。
[0084]
本发明充分利用了舰船目标的散射特性,更进一步的说,海洋背景更多的表现为镜面散射,而舰船目标更多的表现为双跳散射、体散射、螺旋散射,并且从理论上能够说明螺旋散射仅存在与舰船目标中。因此,本发明可以利用螺旋散射作为一种强化因子,来增强舰船目标的散射功率,以达到突出舰船目标,弱化海洋背景的能力。
[0085]
本发明充分考虑了散射波的极化特性,海洋背景相对于舰船目标来说,其表面更为平稳,因此从散射的角度来说更多的表现为镜面散射,而从散射波极化特性的角度来说,散射波更多的表现为各向同性。而对于舰船目标,由于其本身构造相对复杂,表面更加粗糙,因此散射波更多的表现为各向异性。
[0086]
因此,本发明利用舰船目标的散射特性与散射波的各向异性,能够充分表征舰船目标,以实现强化舰船,弱化背景的目的,能够从复杂的海洋背景中检测出舰船。
[0087]
虽然结合附图描述了本发明的实施方式,但是专利所有者可以在所附权利要求的范围之内做出各种变形或修改,只要不超过本发明的权利要求所描述的保护范围,都应当在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。