1.本实用新型涉及半导体制造领域,尤其涉及一种抓取装置。
背景技术:
2.半导体制备过程中,ema(刻蚀)机台内的加热腔体进行制程时需要将环形加热器取出进行清洁,其中环形加热器的工作温度设定在250℃,进行降温操作需要等待环形加热器自然冷却至90℃以下执行清理动作。但是等待腔体自然冷却需要很长的时间,由于腔体内的温度较高,暴露在大气中的腔体内的环形加热器短时间内依然会维持较高的温度,自然散热效率极低,严重降低了工作效率。现有的清环形加热器的取出方式需要两个人操作,其中一人双手各执小号六角扳手分别探进左右两边环形加热器和腔体边缘的缝隙,然后向内钩住环形加热器的侧边向上提,提升一定高度后另一人使用堆叠的干无尘布(湿布导热快)小心的配合,在有限的空间和时间内包住环形加热器往腔体外拿,并保证不会磕碰到边缘造成损失。但现有的操作方式存在危险和不便,因为环形加热器的温度过高,而堆叠的干布并不能有效隔热且有效隔热时间极短,人员操作中烫伤时有发生。
3.因此,如何提供一种抓取装置,以克服现有技术中存在的上述缺陷,日益成为本领域技术人员亟待解决的技术问题之一。
技术实现要素:
4.本实用新型的目的在于提供一种抓取装置,以解决现有技术存在的操作人员手动提取环形加热器时,因环形加热器温度过高,而导致操作人员受伤的问题。
5.为了达到上述目的,本实用新型提供了一种抓取装置,包括:顶握、支撑结构、至少三个勾爪以及设置在所述勾爪上的固定单元和可伸缩部件;
6.其中,所述支撑结构的顶部连接所述顶握,所述支撑结构的底部与至少三个所述勾爪的第一端连接,所述勾爪的第二端与所述固定单元的第一端转动连接,所述固定单元的第二端通过所述可伸缩部件与所述勾爪的本体连接,所述支撑结构、所述勾爪和所述固定单元形成一容纳部;
7.所述抓取装置被配置为:所述顶握通过所述支撑结构控制所述勾爪抓取目标物,以使得所述抓取装置处于闲置或抓取状态;当所述抓取装置处于闲置状态时,所述可伸缩部件自然伸展;当所述抓取装置处于抓取状态时,包括所述目标物进入所述容纳部前,所述可伸缩部件收缩,并在所述目标物进入所述容纳部后,所述可伸缩部件自然伸展,所述固定单元与所述目标物抵接。
8.可选的,所述支撑结构包括:支撑单元、蜗杆、蜗轮和支撑组件;
9.其中,所述蜗轮和所述支撑组件的数量与所述勾爪的数量相匹配;
10.所述蜗杆的第一端与所述顶握连接,所述蜗杆的第二端贯穿所述支撑单元并与所述支撑单元转动连接;
11.所述支撑组件的第一端通过一所述蜗轮与所述支撑单元连接,所述支撑组件的第
二端与一所述勾爪的第一端转动连接;
12.所述蜗轮和所述蜗杆通过所述蜗轮的齿和所述蜗杆的螺纹抵接。
13.可选的,所述支撑组件包括:支撑杆、定位杆和至少两个定位齿;
14.其中,所述支撑杆的第一端连接所述支撑单元,所述支撑杆的第二端与所述勾爪的第一端转动连接;
15.数个所述定位齿沿所述支撑杆轴线方向间隔设置在所述支撑杆上,且所述定位齿面向所述容纳部的一面;
16.所述定位杆的第一端与所述勾爪固定连接,所述定位杆的第二端与任一所述定位齿转动连接。
17.可选的,所述支撑杆包括第一支撑杆、第二支撑杆和第三支撑杆;
18.其中,所述第一支撑杆的第一端通过所述蜗轮与所述支撑单元转动连接,所述第一支撑杆的第二端与所述所述第二支撑杆的第一端转动连接,所述第二支撑杆的第二端与所述第三支撑杆的第一端转动连接;
19.所述第三支撑杆的第二端与所述勾爪的第一端转动连接;
20.所述定位齿设置在所述第三支撑杆面向所述容纳部的一面。
21.可选的,所述支撑单元包括:相连的把持部和支撑部;
22.其中,所述把持部靠近所述顶握;
23.所述支撑部与至少三个所述支撑组件的第一端通过所述蜗轮连接。
24.可选的,所述支撑结构包括:支撑固件和与所述勾爪一一对应的支撑件;
25.其中,所述支撑件的第一端连接所述顶握,所述支撑件的第二端和与其对应的所述勾爪的第一端固定连接;
26.所述支撑固件与所述支撑件面向所述容纳部的一面固定连接。
27.可选的,所述支撑固件为多边形,所述支撑固件的顶点的数量与所述支撑件的数量相适应,所述支撑固件与每一所述支撑件面向所述容纳部的一面固定连接,包括:
28.所述支撑固件的每一顶点与一所述支撑件面向所述容纳部的一面固定连接。
29.可选的,所述勾爪还包括一连接杆,所述连接杆的第一端与所述支撑结构连接,所述连接杆的第二端与所述可伸缩部件连接。
30.可选的,所述可伸缩部件包括:弹簧。
31.可选的,还包括一举升装置,所述举升装置与所述顶握连接,所述举升装置用于带动所述顶握移动。
32.与现有技术相比,本实用新型提供的一种抓取装置具有以下有益效果:
33.本实用新型提供的一种抓取装置,包括:顶握、支撑结构、至少三个勾爪以及设置在所述勾爪上的固定单元和可伸缩部件;其中,所述支撑结构的顶部连接所述顶握,所述支撑结构的底部与至少三个所述勾爪的第一端连接,所述勾爪的第二端与所述固定单元的第一端转动连接,所述固定单元的第二端通过所述可伸缩部件与所述勾爪的本体连接,所述支撑结构、所述勾爪和所述固定单元形成一容纳部;所述抓取装置被配置为:所述顶握通过所述支撑结构控制所述勾爪抓取目标物,以使得所述抓取装置处于闲置或抓取状态;当所述抓取装置处于闲置状态时,所述可伸缩部件自然伸展;当所述抓取装置处于抓取状态时,包括所述目标物进入所述容纳部前,所述可伸缩部件收缩,并在所述目标物进入所述容纳
部后,所述可伸缩部件自然伸展,所述固定单元与所述目标物抵接。本实用新型提供的抓取装置,通过在所述支撑结构上连接至少三个所述勾爪,且所述勾爪上设置有与之相连的固定单元和可伸缩部件,因此,所述顶握能够通过所述支撑结构控制所述勾爪抓取目标物,当利用所述抓取装置抓取所述目标物前,所述勾爪能够贴合所述目标物的侧面并从所述目标物的顶部向底部移动,在移动过程中,所述目标物为所述可伸缩部件提供压力,所述可伸缩部件受到压力收缩,所述固定单元的第二端跟随所述可伸缩部件的压缩而靠近所述勾爪,当所述抓取装置抓取到所述目标物后,即所述目标物进入所述容纳部后,所述可伸缩部件不再受到目标物侧面给予的压力,此时可伸缩部件自然伸展并将所述固定单元的第二端弹出,所述固定单元的第二端与所述目标物底部抵接,由于至少三个勾爪形成的容纳部具有稳定性,使得位于所述容纳部内的目标物能够随着所述抓取装置的移动而移动。由此,本实用新型提供的抓取装置,不仅结构简单,操作方便,能够节约操作时间和提高工作效率,同时由于操作人员无需和目标物直接接触,因此还降低了操作风险。
附图说明
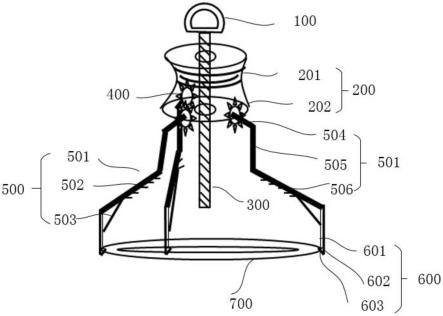
34.图1为本实用新型实施例一提供的抓取装置的结构示意图ⅰ;
35.图2为本实用新型实施例二提供的抓取装置的结构示意图ⅱ;
36.其中,附图标记如下:
37.100-顶握,200-支撑单元,201-把持部,202-支撑部,300-蜗杆,400-蜗轮,500-支撑组件,501-支撑杆,502-定位齿,503-定位杆,504-第一支撑杆,505-第二支撑杆,506-第三支撑杆,600-勾爪,601-连接杆,602-可伸缩部件,603-固定单元,700-目标物,800-支撑固件,900-支撑件。
具体实施方式
38.下面将结合示意图对本实用新型的具体实施方式进行更详细的描述。根据下列描述,本实用新型的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本实用新型实施例的目的。应当了解,说明书附图并不一定按比例的显示本实用新型的具体结构,并且在说明书附图中用于说明本实用新型某些原理的图示性特征也会采取略微简化的画法。本文所公开的本实用新型的具体设计特征包括例如具体尺寸、方向、位置和外形将部分地由具体所要应用和使用的环境来确定。以及,在以下说明的实施方式中,有时在不同的附图之间共同使用同一附图标记来表示相同部分或具有相同功能的部分,而省略其重复说明。在本说明书中,使用相似的标号和字母表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
39.在具体介绍本实用新型提供的一种抓取之前,需要特别说明的是,本文虽然以ema机台为例对本实用新型提供的抓取装置进行说明,但很显然地,本实用新型提供的抓取装置并不仅限于用于ema机台,也可以用于除ema机台之外的其他半导体设备,包括但不限于抛光设备等。
40.实施例一
41.本实施例提供了一种抓取装置,具体地,请参见附图1,图1示意性的提供了抓取装
置的结构示意图ⅰ。从图1可以看出,所述抓取装置包括:顶握100、支撑结构(图中未标识)、至少三个勾爪600以及设置在所述勾爪600上的固定单元603和可伸缩部件602。
42.具体地,所述支撑结构的顶部连接所述顶握100,所述支撑结构的底部与至少三个所述勾爪600的第一端连接,所述勾爪600的第二端与所述固定单元603的第一端转动连接,所述固定单元603的第二端通过所述可伸缩部件602与所述勾爪600的本体连接,所述支撑结构(图中未标示)、所述勾爪600和所述固定单元603形成一容纳部。更具体地,所述抓取装置被配置为:所述顶握100通过所述支撑结构控制所述勾爪600抓取目标物700,以使得所述抓取装置处于闲置或抓取状态;当所述抓取装置处于闲置状态时,所述可伸缩部件602自然伸展;当所述抓取装置处于抓取状态时,包括所述目标物700进入所述容纳部前,所述可伸缩部件602收缩,并在所述目标物700进入所述容纳部后,所述可伸缩部件602自然伸展,所述固定单元603与所述目标物700抵接。
43.如此设置,本实用新型提供的抓取装置,通过在所述支撑结构上连接至少三个所述勾爪600,且所述勾爪600上设置有与之相连的固定单元603和可伸缩部件602,因此,所述顶握100能够通过所述支撑结构控制所述勾爪600抓取目标物700,当利用所述抓取装置抓取所述目标物700前,所述勾爪600能够贴合所述目标物700的侧面并从所述目标物700的顶部向底部移动,在移动过程中,所述目标物700为所述可伸缩部件602提供压力,所述可伸缩部件602受到压力收缩,所述固定单元603的第二端跟随所述可伸缩部件602的压缩而靠近所述勾爪600,当所述抓取装置抓取到所述目标物700后,即所述目标物700进入所述容纳部后,所述可伸缩部件602不再受到目标物700侧面给予的压力,此时可伸缩部件602自然伸展并将所述固定单元603的第二端弹出,所述固定单元603的第二端与所述目标物700底部抵接,由于至少三个勾爪600形成的容纳部具有稳定性,使得位于所述容纳部内的目标物700能够随着所述抓取装置的移动而移动。由此,本实用新型提供的抓取装置,不仅结构简单,操作方便,能够节约操作时间和提高工作效率,同时由于操作人员无需和目标物700直接接触,因此还降低了操作风险。
44.需要说明的是,作为优选,所述可伸缩部件602的第一端与所述固定单元603的连接处与所述固定单元603的第二端端点可以具有一定距离,所述可伸缩部件602的第二端与所述勾爪600的连接处靠近所述勾爪600的第二端。由此,当所述目标物700进入所述容纳部后,所述固定单元603能够更好地承载所述目标物700,从而确保了所述抓取装置能够更好的抓取所述目标物700。
45.优选的,所述支撑结构包括:支撑单元200、蜗杆300、蜗轮400和支撑组件500;其中,所述蜗轮400和所述支撑组件500的数量与所述勾爪600的数量相匹配;所述蜗杆300的第一端与所述顶握100连接,所述蜗杆300的第二端贯穿所述支撑单元200并与所述支撑单元200转动连接;所述支撑组件500的第一端通过一所述蜗轮400与所述支撑单元200连接,所述支撑组件500的第二端与一所述勾爪600的第一端转动连接;所述蜗轮400和所述蜗杆300通过所述蜗轮400的齿与所述蜗杆300的螺纹抵接。由此,通过转动所述蜗杆300从而带动所述蜗轮400的转动,由于所述蜗轮400与所述支撑组件500连接,所述勾爪600与所述支撑组件500连接,因此所述勾爪600会随着所述蜗轮400的转动而移动,从而改变了所述勾爪600的开度,由此,本实施例提供的所述抓取装置通过转动所述蜗杆300进而调节所述勾爪600的开度,从而使得所述抓取装置可以对不同大小的所述目标物700进行拆取。
46.优选的,所述支撑组件500包括:支撑杆501、定位杆503和至少两个定位齿502;其中,所述支撑杆501的第一端连接所述支撑单元200,所述支撑杆501的第二端与所述勾爪600的第一端转动连接;数个所述定位齿502沿所述支撑杆501轴线方向间隔设置在所述支撑杆501上,且所述定位齿502面向所述容纳部的一面;所述定位杆503的第一端与所述勾爪600固定连接,所述定位杆503的第二端与任一所述定位齿502转动连接。在其中一种优选实施方式中,所述支撑杆501包括第一支撑杆504、第二支撑杆505和第三支撑杆506;其中,所述第一支撑杆504的第一端通过所述蜗轮400与所述支撑单元200转动连接,所述第一支撑杆504的第二端与所述第二支撑杆505的第一端转动连接,所述第二支撑杆505的第二端与所述第三支撑杆506的第一端转动连接;所述第三支撑杆506的第二端与所述勾爪600的第一端转动连接;所述定位齿502设置在所述第三支撑杆506面向所述容纳部的一面,所述勾爪600与所述目标物700的侧面平行。由此,通过设置所述定位齿502和所述定位杆503能够保证在调节所述勾爪600的开度后,所述勾爪600能够保持垂直于所述目标物700以顺利到达所述目标物700的底部。
47.优选的,所述支撑单元200包括:相连的把持部201和支撑部202;其中,所述把持部201靠近所述顶握100;所述支撑部202与至少三个所述支撑组件500的第一端通过所述蜗轮400连接。在其中一种优选实施方式中,所述把持部201的形状包括:沙漏型。由此,当对所述勾爪600进行开度调节时,方便操作人员通过握住所述把持部201进行调节。
48.优选的,所述勾爪600还包括一连接杆601,所述连接杆601的第一端与所述支撑结构连接,所述连接杆601的第二端与所述可伸缩部件602连接。由此,所述连接杆601的设置避免了所述可伸缩部件602因所述目标物700的重量而沿重力方向弯曲,而导致所述固定单元603无法与所述目标物700抵接,使得抓取所述目标物700失败的问题。在其中一种优选实施方式中,所述可伸缩部件602包括:弹簧。很显然地,所述可伸缩部件602也可以为除弹簧之外的其他部件,包括但不限于伸缩杆等。
49.优选的,还包括一举升装置,所述举升装置与所述顶握100连接,所述举升装置用于带动所述顶握100移动。由此,方便操作人员通过操纵所述举升装置对较重的目标物700进行抓取。在其中一种优选实施方式中,所述举升装置为电动举升装置。
50.实施例二
51.本实施例提供了另一种抓取装置。为了避免赘述,以下仅就与实施例一的不同之处予以说明,未详细说明的部分,请参见实施例一的相关说明进行理解。具体地,请参见附图2,图2示意性地提供了抓取装置的结构示意图ⅱ,从图2可以看出,所述支撑结构包括:支撑固件800和与所述勾爪600一一对应的支撑件900;其中,所述支撑件900的第一端连接所述顶握100,所述支撑件900的第二端和与其对应的所述勾爪600的第一端固定连接;所述支撑固件800与所述支撑件900面向所述容纳部的一面固定连接。如此设置,本实施例提供的所述抓取装置结构简单容易具现化,且由于所述支撑件900与所述勾爪600固定连接,因此,在使用过程中能够专机专用,无需调节所述勾爪600的开度,从而节约了操作时间。
52.优选的,所述支撑固件800为多边形,所述支撑固件800的顶点的数量与所述支撑件900的数量相适应,所述支撑固件800与每一所述支撑件900面向所述容纳部的一面固定连接,包括:所述支撑固件800的每一顶点与一所述支撑件900面向所述容纳部的一面固定连接。由此,通过所述支撑固件800能够增加所述支撑结构的稳定性,且所述支撑固件800的
形状与连接位置避免了所述支撑固件800突出所述支撑件900,而导致所述抓取装置在使用过程中损伤目标物700所在腔体。
53.另外,在本文各个实施方式中的各功能模块可以集成在一起形成一个独立的部分,也可以是各个模块单独存在,也可以两个或两个以上模块集成形成一个独立的部分。此外,需要说明的是,除非特别说明或者指出,否则说明书中的术语“第一”、“第二”、“第三”等描述仅仅用于区分说明说中的各个组件。元素、步骤等,而不是用于表示各个组件、元素、步骤之间的逻辑关系或者顺序关系等。
54.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
55.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。
56.综上,本实用新型提供的抓取装置,通过在所述支撑结构上连接至少三个所述勾爪600,且所述勾爪600上设置有与之相连的固定单元603和可伸缩部件602,因此,所述顶握100能够通过所述支撑结构控制所述勾爪600抓取目标物700,当利用所述抓取装置抓取所述目标物700前,所述勾爪600能够贴合所述目标物700的侧面并从所述目标物700的顶部向底部移动,在移动过程中,所述目标物700为所述可伸缩部件602提供压力,所述可伸缩部件602受到压力收缩,所述固定单元603的第二端跟随所述可伸缩部件602的压缩而靠近所述勾爪600,当所述抓取装置抓取到所述目标物700后,即所述目标物700进入所述容纳部后,所述可伸缩部件602不再受到目标物700侧面给予的压力,此时可伸缩部件602自然伸展并将所述固定单元603的第二端弹出,所述固定单元603的第二端与所述目标物700底部抵接,由于至少三个勾爪600形成的容纳部具有稳定性,使得位于所述容纳部内的目标物700能够随着所述抓取装置的移动而移动。由此,本实用新型提供的抓取装置,不仅结构简单,操作方便,能够节约操作时间和提高工作效率,同时由于操作人员无需和目标物700直接接触,因此还降低了操作风险。
57.上述仅为本实用新型的优选实施例而已,并不对本实用新型起到任何限制作用。任何所属技术领域的技术人员,在不脱离本实用新型的技术方案的范围内,对本实用新型揭露的技术方案和技术内容做任何形式的等同替换或修改等变动,均属未脱离本实用新型的技术方案的内容,仍属于本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
