1.本实用新型属于医用器械器材技术领域,具体涉及一种医用机械臂及其防抱死装置。
背景技术:
2.随着科技的发展,在很多医疗检测甚至医学手术过程中,都采用了机械臂辅助操作。机械臂是一个复杂的动力学系统,其动力学方程具有非线性、强耦合、实变等特点。常见的机械臂一般包括若干摆臂,各摆臂间通过不同的关节实现不同方向的运动,再由多摆臂结合实现多自由度的机械臂运动。现有的机械臂在运动过程中,当达到机械臂运动轨迹超过极限时,机械臂会自动抱死,导致运动停止,需要重新启动机械臂。
技术实现要素:
3.本实用新型的目的在于克服现有技术的不足之处,提供了一种医用机械臂及其防抱死装置,解决了上述背景技术中的问题。
4.本实用新型解决其技术问题所采用的技术方案是:提供了一种医用机械臂的防抱死装置,包括固定部和限位部,所述固定部设置于机械臂至少一个摆臂的周壁上,所述限位部为由固定部向外且朝向相邻摆臂方向延伸形成的自由端,所述限位部的端头设有顶抵面,所述顶抵面向内凹陷且具有与相邻摆臂外周贴合固定的形状。
5.在本实用新型一较佳实施例中,抱死装置具有由所述固定部向限位部方向横截面积逐渐减小的结构。
6.在本实用新型一较佳实施例中,当所述顶抵面与摆臂外周顶抵时,相邻两个摆臂的夹角大于机械臂运动的极限夹角。
7.本实用新型还提供了一种医用机械臂,设有如上所述的一种医用机械臂的防抱死装置。
8.在本实用新型一较佳实施例中,包括至少两个摆臂,其中远端摆臂通过第一关节绕近端摆臂在第一平面内运动,所述防抱死装置装设于两个摆臂的夹角所在平面内且位于远端摆臂上。
9.在本实用新型一较佳实施例中,所述近端摆臂的底部设有底座。
10.在本实用新型一较佳实施例中,所述近端摆臂通过第二关节与底座连接,所述近端摆臂通过第二关节绕底座在垂直于第一平面的第二平面内垂直。
11.在本实用新型一较佳实施例中,所述远端摆臂的末端设有拓展安装部。
12.在本实用新型一较佳实施例中,所述拓展安装部通过第三关节可旋转地装设于远端摆臂。
13.本技术方案与背景技术相比,它具有如下优点:
14.1、本方案通过在合适位置设置限位装置,当所述顶抵面与摆臂外周顶抵时,相邻两个摆臂的夹角大于机械臂运动的极限夹角,形成物理限位,限制机械臂超过极限的运动,
实现防止机械臂抱死。
15.2、本方案的防抱死装置无需修改程序或控制或复杂的动力系统,通过外加的物理装置即可实现限位,不影响机械臂原有程序和功能。
16.3、本方案的防抱死装置结构简单、方便拆装,可以依据需要增减数量和设置于任何位置,且通过调节其设置的位置即可实现相邻摆臂运动夹角的大小限位控制。
17.4、本方案的机械臂设置拓展安装部,可以装设包括医疗检测端头或微创手术器械在内的装置,还设置底座,可以与手术台车结合,方便移动且更加稳定。
附图说明
18.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
19.图1为实施例1防抱死装置结构图;
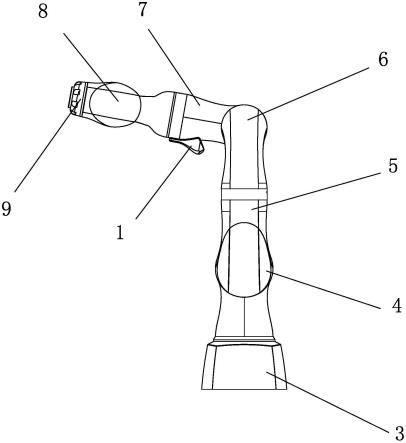
20.图2为实施例2机械臂结构图。
21.其中,1-防抱死装置、11-固定部、12-限位部、2-顶抵面、3-底座、4-第二关节、5-近端摆臂、6-第一关节、7-远端摆臂、8-第三关节、9-拓展安装部。
具体实施方式
22.在本实用新型的描述中,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
23.实施例1
24.一种医用机械臂的防抱死装置1,包括固定部11和限位部12,所述固定部11设置于机械臂其中一个摆臂的周壁上,所述限位部12为由固定部11向外且朝向相邻摆臂方向延伸形成的自由端,所述限位部12的端头设有顶抵面2,所述顶抵面2向内凹陷且具有与相邻摆臂外周贴合固定的形状。
25.本实施例中,防抱死装置1具有由所述固定部11向限位部12方向横截面积逐渐减小的结构,所述固定部11离关节具有一定距离,避免影响摆臂正常活动。当所述顶抵面2与摆臂外周顶抵时,相邻两个摆臂的夹角大于机械臂运动的极限夹角,即当机械臂移动到极限时会有一个物理限位,限制机械臂超过极限的运动,来防止机械臂抱死。
26.实施例2
27.一种医用机械臂,设有实施例1的一种医用机械臂的防抱死装置1。
28.本实施例设有两个摆臂,其中远端摆臂7通过第一关节6绕近端摆臂5在第一平面内运动,所述防抱死装置1装设于两个摆臂的夹角所在平面内且位于远端摆臂7上。
29.所述近端摆臂5的底部设有底座3,设置于台车上可实现移动。所述近端摆臂5通过第二关节4与底座3连接,所述近端摆臂5通过第二关节4绕底座3在垂直于第一平面的第二平面内垂直。
30.所述远端摆臂7的末端设有拓展安装部9,所述拓展安装部9通过第三关节8可旋转地装设于远端摆臂7,所述拓展安装部9设有套管结构,可以装设包括医疗检测端头、机械手
或其他微创手术器械在内的装置。
31.以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
技术特征:
1.一种医用机械臂的防抱死装置,其特征在于:包括固定部和限位部,所述固定部设置于机械臂至少一个摆臂的周壁上,所述限位部为由固定部向外且朝向相邻摆臂方向延伸形成的自由端,所述限位部的端头设有顶抵面,所述顶抵面向内凹陷且具有与相邻摆臂外周贴合固定的形状。2.根据权利要求1所述的一种医用机械臂的防抱死装置,其特征在于:防抱死装置具有由所述固定部向限位部方向横截面积逐渐减小的结构。3.根据权利要求1所述的一种医用机械臂的防抱死装置,其特征在于:当所述顶抵面与摆臂外周顶抵时,相邻两个摆臂的夹角大于机械臂运动的极限夹角。4.一种医用机械臂,其特征在于:设有如权利要求1或2所述的一种医用机械臂的防抱死装置。5.根据权利要求4所述的一种医用机械臂,其特征在于:包括至少两个摆臂,其中远端摆臂通过第一关节绕近端摆臂在第一平面内运动,所述防抱死装置装设于两个摆臂的夹角所在平面内且位于远端摆臂上。6.根据权利要求5所述的一种医用机械臂,其特征在于:所述近端摆臂的底部设有底座。7.根据权利要求6所述的一种医用机械臂,其特征在于:所述近端摆臂通过第二关节与底座连接,所述近端摆臂通过第二关节绕底座在垂直于第一平面的第二平面内垂直。8.根据权利要求5所述的一种医用机械臂,其特征在于:所述远端摆臂的末端设有拓展安装部。9.根据权利要求8所述的一种医用机械臂,其特征在于:所述拓展安装部通过第三关节可旋转地装设于远端摆臂。
技术总结
本实用新型公开了一种医用机械臂及其防抱死装置,该防抱死装置包括固定部和限位部,所述固定部设置于机械臂至少一个摆臂的周壁上,所述限位部为由固定部向外且朝向相邻摆臂方向延伸形成的自由端,所述限位部的端头设有顶抵面,所述顶抵面向内凹陷且具有与相邻摆臂外周贴合固定的形状。当所述顶抵面与摆臂外周顶抵时,相邻两个摆臂的夹角大于机械臂运动的极限夹角,形成物理限位,限制机械臂超过极限的运动,实现防止机械臂抱死。实现防止机械臂抱死。实现防止机械臂抱死。
技术研发人员:郭少波 曾达 林韵 冯庆山 孙俊杰 张晓锋
受保护的技术使用者:大博医疗科技股份有限公司
技术研发日:2022.07.07
技术公布日:2023/2/6
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
