1.本发明属于机器人领域,尤其是涉及一种飞镖发射机工作方法。
背景技术:
2.飞镖作为小型分型器的一种,其作为人们娱乐方式的一种,越来越受到人们的喜爱,而随着自动化设备的发展,使用者可以通过利用小型飞行器的发射机替代使用者人工发射飞镖来进行娱乐,同时小型飞行器发射机需要发射飞镖命中16米外以及20米外的仅只有半张a4纸大小的装甲板,以实现远距离、高伤害的对建筑物的打击能力。小型飞行器发射机,需要将羽毛球、网球、乒乓球等物体抛掷出去。
3.现有中国专利申请号为202120501413.3,公告日为2021.12.03的专利文献,该实用新型涉及一种飞镖发射机器人,包括机架,机架上设有发射件,发射件包括发射架,发射架上通过滑轨设有发射座,发射座与发射架之间设有弹性件;发射架上设有运动组件,运动组件可以用于驱动发射座沿滑轨运动;发射架的正上方设有补料件,补料件包括置料板,置料板上设有气缸,气缸和滑轨在同一水平面上的投影重合。但是该实用新型补料过程通过气缸将飞镖推入发射座,发射座与置料板之间具有高度差,在补料过程中极易发生飞镖脱落,而且补料过程飞镖与发射座之间对准精度较低,每次补料都需要第三电机将活动架抬升尽快靠近置料板再将飞镖从置物板推入发射座中,再重新调整发射方向,方向调整过程较慢,发射效率低。
技术实现要素:
4.本发明的目的在于提供一种飞镖发射机工作方法,能快速对飞行器进行发射,且对多个方向多个角度进行发射,操作简单。
5.为达到上述目的,一种飞镖发射机工作方法,通过小型飞行器发射机进行飞镖发射,小型飞行器发射机包括底座旋转调节模块、供料发射模块和高度调节模块,所述供料发射模块位于高度调节模块上部,高度调节模块固定在底座旋转调节模块上,所述供料发射模块内设有发射通道;所述供料发射模块包括供料发射机架、发射机构、供料机构、方向稳定机构;发射机构、供料机构和方向稳定机构均固定在发射机架上,所述供料机构活动连接于供料发射机架后端,用于存放飞行器以及使待发射的飞行器与发射机构接触并发射,所述发射机构固定于供料发射机构前端,所述方向稳定机构位于发射机架中部;如图2和图5所示,所述供料机构包括供料电机、供料丝杆联轴器、供料首部固定件、供料尾部固定件、上铰链板、供料下铰链板、供料推板、装填丝杆和供料丝杆螺母,所述供料首部固定件固定于供料发射机架上端,所述供料电机的输出轴与供料丝杆联轴器一端固定连接,供料丝杆连轴器另一端与装填丝杆固定连接,所述装填丝杆另一端穿过供料首部固定件与供料尾部固定件连接,所述供料首部固定件和供料尾部固定件内均设有轴承,所述装填丝杆位于轴承内转动,所述装填丝杆中部还穿过供料推板,所述供料推板内设有供料丝杆螺母,所述装填丝杆与供料丝杆螺母活动连接;所述供料推板固定连接有上铰链板,上铰链板另一端活动
连接有下铰链板,下铰链板前侧固定有供料下板,所述供料下板对准发射通道,所述发射通道靠近发射机构的一端为发射口,所述发射通道伸入供料机构的为进料口中;具体步骤如下:(1)准备发射时,飞行器存储在供料发射模块内的发射通道后端;(2)底座旋转调节模块进行调整发射方向;(3)高度调节模块进行调整发射高度;(4)供料机构推送飞行器,使待发射的飞行器与发射机构接触;(5)发射机构对飞行器进行加速发射;步骤(4)具体还包括:(4.1)供料电机的输出端转动带动供料丝杆联轴器转动;(4.2)供料丝杆联轴器带动装填丝杆转动;(4.3)装填丝杆转动带动供料丝杆螺母沿装填丝杆轴向移动,同时带动供料推杆沿装填丝杆轴向移动;(4.4)供料推板带动下端的供料下板推动飞行器沿着发射通道往发射机构方向移动,推送飞行器进入到发射机构中。
6.以上设置,准备发射时,多个飞行器间隔存储在供料发射模块内的发射通道后端,供料发射模块内的供料机构用于存放飞行器以及使待发射的飞行器与发射机构接触从而发射飞行器,方向稳定机构设置在发射机构中部用于调整飞行器的供料方向与发射方向,因此,可以多个飞行器储存在供料机构中等待发射机构将其发射出去,整体补料准确性高,上一个飞行器发射完即可立刻将下一个飞行器推送至发射机构进行发射,补料速度快、发射效率高供料电机的输出端转动带动供料丝杆联轴器转动,通过供料丝杆联轴器带动装填丝杆转动,提供减震和消除径向力的惯性,装填丝杆与供料推板中的供料丝杆螺母形成丝杆螺母传动,装填丝杆转动带动供料丝杆螺母沿装填丝杆轴向移动,从而带动供料推板沿装填丝杆轴向移动;飞行器供料时,供料电机带动装填丝杆转动,装填丝杆转动带动供料推板往发射机构方向移动,供料推板带动下端的供料下板推动飞行器沿着发射通道往发射机构方向移动,供料过程对接准确性高,通过底座旋转调节模块实现发射方向的调整,通过高度调节模块进行调整发射高度,从而实现对多个方向以及多个高度发射飞行器,操作简单。
7.进一步的,所述装填丝杆一侧上还设有装填光轴,所述装填光轴一端贯穿供料首部固定件,另一端贯穿供料尾部固定件,中部贯穿供料推板,装填光轴与供料首部固定件和供料尾部固定件均通过固定环连接,装填光轴与供料推板通过轴承活动连接,步骤(4.3)还包括(4.31)装填丝杆带动供料推杆沿装填丝杆轴向移动,同时,供料推杆沿着位于装填丝杆一侧的装填光轴滑动。
8.以上设置,位于装填丝杆一侧的装填光轴为供料推板的移动增加稳定性,位于装填丝杆一侧的装填光轴一端贯穿供料首部固定件,另一端贯穿供料尾部固定件,中部贯穿供料推板,装填光轴与供料首部固定件和供料尾部固定件均通过固定环连接,装填光轴与供料推板通过轴承连接,通过在装填丝杆的一侧设置装填光轴从而使得装填丝杆带动供料推板移动进行导向,提高供料稳定性。
9.进一步的,所述发射机构包括两对摩擦轮和对应设置加速电机,所述摩擦轮设于发射通道两侧,所述加速电机通过加速电机固定架固定于发射机架内,所述摩擦轮与加速
电机的输出轴固定连接,上固定板和下固定板分别与侧固定板的上下两端相连,所述加速电机固定架包括上固定板、下固定板和侧固定板,所述侧固定板垂直于发射机架长度方向设置,所述侧固定板上两侧设有卡接口,所述上固定板和下固定板沿发射机架长度方向两端设有与卡接口匹配设置的卡接凸块,所述上固定板与侧固定板通过卡接凸块与卡接口可拆卸连接,所述下固定板与侧固定板通过卡接凸块与卡接口可拆卸连接,所述侧固定板中部设有支撑凹槽,步骤(5)具体包括:(5.1)加速电机加速旋转带动摩擦轮加速旋转;(5.2)供料推板将待发射的飞行器推向发射机构内;(5.3)飞行器两侧与摩擦轮摩擦,飞行器在摩擦轮的作用下被加速并发射出去。
10.以上设置,摩擦轮分别由独立的加速电机驱动,加速电机固定在发射机架内发射通道的两侧,摩擦轮与加速电机的输出轴固定连接,摩擦轮被加速电机加速到指定转速后,供料推板将待发射的飞行器推向发射机构内,飞行器两侧与摩擦轮摩擦,飞行器在摩擦轮的作用下被加速并发射出去,两个对置设置的摩擦轮实现对飞行器的加速;上固定板和下固定板分别通过卡接凸块和卡接口与侧固定板固定连接,方便将增加和减少所需要的加速电机和摩擦轮,从而调整飞行器从发射口出去的发射速度。
11.进一步的,所述底座旋转调节模块包括底座、圆台转盘、旋转调节电机、电机固定板、主动齿轮和齿条板,所述圆台转盘转动连接在底座上,所述旋转调节电机和圆台转盘通过电机固定板固定连接,所述电机固定板一侧的下端与圆台转盘上端固定连接,所述旋转调节电机固定于电机固定板上端面,所述旋转调节电机的输出轴贯穿电机固定板固定连接有主动齿轮,所述齿条板固定于底座下端,所述主动齿轮与齿条板啮合连接,旋转调节电机带动主动齿轮转动并与齿条板齿合,由于齿条板固定在底座上,旋转调节电机带动主动齿轮转动并与齿条板齿合,由于齿条板固定在底座上,旋转调节电机固定在电机固定板上,从而主动齿轮与齿条板齿合带动与圆台转盘在底座上转动,步骤(2)具体包括:(2.1)旋转调节电机的输出端转动带动主动齿轮转动;(2.2)主动齿轮沿着齿条板圆弧方向移动;(2.3)旋转调节电机带动与旋转调节电机固定连接的支撑架和圆台转盘在底座上沿圆台转盘圆周方向转动。
12.以上设置,旋转调节电机的输出端转动带动主动齿轮转动,主动齿轮与齿条板啮合连接,因此,主动齿轮沿着齿条板圆弧方向移动,主动齿轮移动带动旋转调节电机移动,同时带动与旋转调节电机固定连接的支撑架和圆台转盘在底座上沿圆台转盘圆周方向转动,旋转结构简单可靠。
13.进一步的,所述高度调节模块包括高度调节电机、高度调节丝杆、高度调节丝杆联轴器、丝杆座、调节丝杆螺母、丝杆螺母座、线轨、线轨滑块、联动固定板、支撑杆和支撑架,所述支撑架下端与圆台转盘上端固定连接,所述联动固定板滑动设置在支撑架前端,所述联动固定板上端两侧上设有支撑杆,所述支撑杆下端与联动固定板转动连接,所述支撑杆上端与发射机架前部下端转动连接,所述支撑架后部与发射机架后部下端转动连接;所述高度调节电机设于支撑架中部,所述高度调节电机与高度电机固定板上端中部固定连接,高度电机固定板上端两侧与支撑架两侧下端固定连接,所述高度调节电机输出端与高度调节丝杆联轴器一端连接,高度调节丝杆联轴器另一端与高度调节丝杆连接,所述高度调节
丝杆另一端与丝杆座内的轴承活动连接,所述丝杆座固定于支撑架上,高度调节丝杆中部贯穿联动固定板下端的丝杆螺母座,所述丝杆螺母座中设有调节丝杆螺母,所述高度调节丝杆与调节丝杆螺母活动连接;所述支撑架两侧设有线轨,所述联动固定板下端两侧上设有线轨滑块,所述线轨滑块下端设有与线轨对应设置的滑槽;所述高度调节电机的输出端方向与线轨的长度方向相同;所述支撑架前后两端上还设有滑轮固定板,所述滑轮固定板上设有与滑轮,所述底座上设有与滑轮对应设置的圆弧导轨,所述圆弧导轨与滑轮固定板之间设有减震板作为支承,步骤(3)具体包括:(3.1)高度调节电机驱动输出端转动带动高度调节丝杆联轴器转动;(3.2)高度调节丝杆联轴器带动高度调节丝杆转动;(3.3)高度调节丝杆转动带动丝杆螺母座上的联动固定板沿着线轨长度方向移动;(3.4)联动固定板移动时会带动联动固定板上的支撑杆移动;(3.5)支撑杆移动时会带动发射机架前部移动,发射机架前部高度进行改变,从而完成对发射高度进行调节。
14.以上设置,进行发射高度调节时,高度调节电机驱动输出端转动带动高度调节丝杆联轴器转动,高度调节丝杆联轴器带动高度调节丝杆转动,高度调节丝杆与调节丝杆螺母形成丝杆螺母传动,调节丝杆螺母沿着高度调节丝杆螺母轴向移动,因此带动丝杆螺母座上的联动固定板沿着线轨长度方向移动,联动固定板移动时会带动联动固定板上的支撑杆移动,支撑杆移动时会带动发射机架前部移动,又因为发射机架后部与支撑架后部通过销连接,因此,发射机架后部活动连接的情况下,发射机架前部高度进行改变,从而对发射高度进行调节,高度调节方式简单可靠;转动时位于支撑架前后两端的牛眼轮沿着底座上的圆弧导轨滑动,支撑架前后两端的牛眼轮可以为支撑架提供足够的支承力,减震板可以在滑轮转动时以及飞行器发射时产生形变可以提供一个预紧力,用来抵消发射时的后坐力和转动时的压力。
15.进一步的,所述方向稳定机构包括侧限位板、侧限位支架、上导轨和下导轨,所述侧限位板为垂直间隔设置固定在发射通道两侧并从发射通道进料口延伸至发射通道中部,所述侧限位板之间通过限位固定板进行固定,所述限位固定板为l型板,限位固定板一端设有四个以上的限位凸块,限位凸块与侧限位板上的限位槽进行卡接固定,所述侧限位板靠近进料口一侧为端部向外倾斜设置,所述侧限位支架固定于发射通道两侧与侧限位板连接并延伸至发射机构一端,所述上导轨固定于发射通道上侧,所述上导轨一侧固定在供料尾部固定件下端,所述上导轨另一侧固定在发射口一端,所述下导轨固定于发射通道下侧,所述下导轨一端固定在进料口一端,所述下导轨另一端固定在发射口一端;侧限位板、侧限位支架、上导轨和下导轨与飞行器的机身贴合。
16.以上设置,侧限位板、侧限位支架、上导轨和下导轨与飞行器的机身贴合,可以稳定发射方向;侧限位板、侧限位支架、上导轨和下导轨的表面光滑减少摩擦力,侧限位板靠近进料口一侧为端部向外倾斜设置通过使得进料口方向开口较大,从而方便进料,而且在进料完之后经过下导轨进行导向,在靠近发射口的一端设置上导轨,上导轨和下导轨从发射通道的上下方向上对飞行器进入发射口进行限位,能使得飞行器能更好更可靠地进入到发射口内。
17.进一步的,所述供料发射机架一侧上设有两个以上间隔设置的微动开关,供料推板靠近微动开关的一侧上设有微动开关触发件,微动开关间隔长度与飞行器长度相同,供料推板每推动一个飞行器向前,微动触发件触碰一个微动开关;步骤(4)和步骤(5)之间还包括步骤(6)供料推板每推送一个飞行器进入发射机构,供料推板靠近微动开关的一侧上微动开关触发件与微动开关接触,微动开关连接发送启动信号到发射机构的加速电机中,加速电机启动对摩擦轮进行加速。
18.以上设置,供料推板推动飞行器对发射机构进行供料时,每推送一个飞行器进入发射机构,供料推板靠近微动开关的一侧上微动开关触发件与微动开关接触,微动开关连接发送启动信号到发射机构的加速电机中,加速电机启动对摩擦轮进行加速,从而对待发射的飞行器进行发射操作,触发式开关实现自动加速发射。
19.进一步的,所述供料发射机架上还设有红外瞄准器,所述红外瞄准器设于发射口上端,发射红外激光用于照射发射口的发射口方向。
20.以上设置,调整发射口的发射方向可以同过红外瞄准器发射的红外激光进行判断发射方向,便于观察得到是否对准发射的地点,实现远距离命中目标。
附图说明
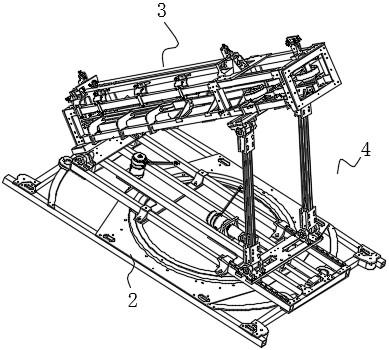
21.图1为本发明中小型飞行器发射机的结构示意图。
22.图2为本发明中设有飞行器的供料发射模块的爆炸图。
23.图3为本发明中供料机构的爆炸图。
24.图4本发明中底座旋转调节模块的结构示意图。
25.图5本发明中底座旋转调节模块的爆炸图。
26.图6为本发明中高度调节模块的结构示意图。
27.图7为本发明中高度调节模块的爆炸图。
28.图8为本发明底座旋转后的结构示意图。
29.图9为本发明高度调节后的结构示意图。
30.图10为本发明中侧限位板、侧限位支架、侧固定板、上导轨、下导轨、摩擦轮、加速电机和电机固定架连接的结构示意图。
31.图11为本发明中摩擦轮、加速电机和电机固定架的结构示意图。
32.图12为本发明中摩擦轮、加速电机和电机固定架的爆炸图。
33.图13为本发明中侧固定板的主视图。
34.图14为本发明中限位固定板的主视图。
35.图15为本发明中飞镖发射机的工作流程图。
具体实施方式
36.下面结合附图和具体实施方式对本发明做进一步详细说明。
37.如图1-14所示,一种小型飞行器发射机,用于发射小型飞行器1,小型飞行器发射机包括底座旋转调节模块2、供料发射模块3和高度调节模块4,所述供料发射模块3位于高度调节模块4上部,高度调节模块4固定在底座旋转调节模块2上,所述供料发射模块3内设有发射通道5;所述供料发射模块3包括供料发射机架31、发射机构32、供料机构33、方向稳
定机构34;发射机构32、供料机构33和方向稳定机构34均固定在发射机架31上,所述供料机构33活动连接于供料发射机架31后端,用于存放飞行器1以及使待发射的飞行器1与发射机构32接触并发射,所述发射机构32固定于供料发射机构31前端,所述方向稳定机构34位于发射机架32中部;如图2和图5所示,所述供料机构33包括供料电机331、供料丝杆联轴器332、供料首部固定件333、供料尾部固定件334、上铰链板335、供料下铰链板336、供料推板337、装填丝杆338和供料丝杆螺母339,所述供料首部固定件333固定于供料发射机架31上端,所述供料电机331的输出轴与供料丝杆联轴器332一端固定连接,供料丝杆连轴器332另一端与装填丝杆338固定连接,所述装填丝杆338另一端穿过供料首部固定件333与供料尾部固定件334连接,所述供料首部固定件333和供料尾部固定件334内均设有轴承,所述装填丝杆338位于轴承内转动,所述装填丝杆338中部还穿过供料推板337,所述供料推板337内设有供料丝杆螺母339,所述装填丝杆338与供料丝杆螺母339活动连接;所述供料推板337固定连接有上铰链板335,上铰链板335另一端活动连接有下铰链板336,下铰链板336前侧固定有供料下板330,所述供料下板330伸入发射通道5中。
38.以上设置,准备发射时,多个飞行器1间隔存储在供料发射模块3内的发射通道5后端,供料发射模块3内的供料机构33用于存放飞行器1以及使待发射的飞行器1与发射机构32接触从而发射飞行器1,方向稳定机构34设置在发射机构32中部用于调整飞行器1的供料方向与发射方向,因此,可以多个飞行器1储存在供料机构33中等待发射机构32将其发射出去,整体补料准确性高,上一个飞行器1发射完即可立刻将下一个飞行器1推送至发射机构32进行发射,补料速度快、发射效率高,供料电机331的输出端转动带动供料丝杆联轴器332转动,通过供料丝杆联轴器332带动装填丝杆338转动,提供减震和消除径向力的惯性,装填丝杆338与供料推板337中的供料丝杆螺母339形成丝杆螺母传动,装填丝杆338转动带动供料丝杆螺母339沿装填丝杆338轴向移动,从而带动供料推板337沿装填丝杆338轴向移动;飞行器1供料时,供料电机331带动装填丝杆338转动,装填丝杆338转动带动供料推板337往发射机构32方向移动,供料推板337带动下端的供料下板330推动飞行器1沿着发射通道5往发射机构32方向移动,,通过底座旋转调节模块实现发射方向的调整,通过高度调节模块4进行调整发射高度,从而实现对多个方向以及多个高度发射飞行器1,操作简单。
39.如图2和图3所示,所述装填丝杆338一侧上还设有装填光轴351,所述装填光轴351一端贯穿供料首部固定件333,另一端贯穿供料尾部固定件334,中部贯穿供料推板337,装填光轴351与供料首部固定件333和供料尾部固定件334均通过固定环352活动连接,装填光轴351与供料推板337通过轴承连接。
40.以上设置,位于装填丝杆338一侧的装填光轴351为供料推板的移动增加稳定性,位于装填丝杆338一侧的装填光轴351一端贯穿供料首部固定件333,另一端贯穿供料尾部固定件334,中部贯穿供料推板337,装填光轴351与供料首部固定件333和供料尾部固定件334均通过固定环352活动连接,通过在装填丝杆337的一侧设置装填光轴351从而使得装填丝杆337带动供料推板337移动进行导向,装填光轴351与供料推板337通过轴承连接,提高供料稳定性。
41.如图2、图11和图12所示,在本实施例中,所述发射机构32包括两对摩擦轮321和对应设置加速电机322,所述摩擦轮321设于发射通道5两侧,所述加速电机322通过加速电机固定架323固定于发射机架31内,所述摩擦轮321与加速电机322的输出轴固定连接,所述加
速电机固定架323包括上固定板324、下固定板325和侧固定板326,上固定板324和下固定板325分别与侧固定板326的上下两端相连,本实施例中,侧固定板326设置有两个,两个侧固定板326设置在上固定板324和下固定板325的两侧且与上固定板324和下固定板325相连形成固定框,上固定板324上固定连接有加速电机322,所述侧固定板326垂直于发射机架31长度方向,所述侧固定板326上两侧设有卡接口3261,所述上固定板324和下固定板325沿发射机架31长度方向两端设有与卡接口3261匹配设置的卡接凸块3262,所述上固定板324与侧固定板3262通过卡接凸块3262与卡接口3261固定连接,所述下固定板325与侧固定板326通过卡接凸块3262与卡接口3261可拆卸连接,所述侧固定板326中部设有支撑凹槽3263。
42.以上设置,两个对置设置的摩擦轮321实现对飞行器1的加速,摩擦轮321分别由独立的加速电机322驱动,加速电机322固定在发射机架31内发射通道5的两侧,摩擦轮321与加速电机322的输出轴固定连接,摩擦轮321被加速电机322加速到指定转速后,供料推板337将待发射的飞行器1推向发射机构32内,飞行器1两侧与摩擦轮321摩擦,飞行器1在摩擦轮321的作用下被加速并发射出去,两个对置设置的摩擦轮321实现对飞行器1的加速;上固定板324和下固定板325分别通过卡接凸块3262和卡接口3261与侧固定板3262可拆卸连接,方便将增加和减少所需要的加速电机322和摩擦轮321,从而调整飞行器1从发射口出去的发射速度。
43.如图4和图5所示,所述底座旋转调节模块2包括底座21、圆台转盘22、旋转调节电机23、电机固定板28、主动齿轮25和齿条板26,所述圆台转盘22活动转动连接在底座21上,所述旋转调节电机23和圆台转盘22通过电机固定板28 固定连接,所述电机固定板28一侧的下端与圆台转盘22上端固定连接,所述旋转调节电机23固定于电机固定板28上端面,所述旋转调节电机23的输出轴贯穿电机固定板28固定连接有主动齿轮25,所述齿条板26固定于底座21下端,所述旋转调节电机23的输出轴固定连接有主动齿轮25,所述主动齿轮25与齿条板26啮合连接,所述电机固定板28一侧的下端与圆台转盘22固定连接,旋转调节电机23带动主动齿轮25转动并与齿条板26齿合,由于齿条板26固定在底座21上,旋转调节电机23带动主动齿轮25转动并与齿条板26齿合,由于齿条板26固定在底座21上,旋转调节电机23固定在电机固定板28上,从而主动齿轮25与齿条板26齿合带动与圆台转盘22在底座21上转动。
44.以上设置,旋转调节电机23的输出端转动带动主动齿轮25转动,主动齿轮25与齿条板25啮合连接,因此,主动齿轮25沿着齿条板25圆弧方向啮合移动,同时,主动齿轮25移动带动旋转调节电机23移动,同时旋转调节电机23带动与旋转调节电机23固定连接的电机固定板28转动,同时和电机固定板28固定连接圆台转盘22在底座21上沿圆台转盘22圆周方向转动,旋转结构简单可靠。
45.如图13所示,支撑凹槽3263的中部还凸设有两个平行设置的凸柱32631,两个凸柱32631形成第一凹槽32632,位于第一凹槽32632两侧形成第二凹槽32633,以上设置,当飞行器1进入发射口时,飞行器1的底部与两个凸柱32631相接触对飞行器进行支撑,飞行器两侧的飞行翅片通过第二凹槽32622进行容纳实现导向作用,从而使得飞行器顺利进入到发射口内。
46.如图6和图7所示,所述高度调节模块4包括高度调节电机41、高度调节丝杆42、高度调节丝杆联轴器43、丝杆座44、调节丝杆螺母45、丝杆螺母座46、线轨47、线轨滑块48、联
动固定板49、支撑杆40和支撑架27,所述支撑架27下端与圆台转盘22上端固定连接,所述联动固定板49滑动设置在支撑架27前端,所述联动固定板49上端两侧上设有支撑杆40,所述支撑杆40下端与联动固定板49转动连接,所述支撑杆40上端与发射机架31前部下端转动连接,所述支撑架27后部与发射机架31后部下端转动连接;所述高度调节电机41设于支撑架27中部,所述高度调节电机41与高度电机固定板410上端中部固定连接,高度电机固定板410上端两侧与支撑架40两侧下端固定连接,所述高度调节电机41输出端与高度调节丝杆联轴器43一端连接,高度调节丝杆联轴器43另一端与高度调节丝杆42连接,所述高度调节丝杆42另一端与丝杆座44内的轴承活动连接,所述丝杆座44固定于支撑架27上,高度调节丝杆42中部贯穿联动固定板49下端的丝杆螺母座46,所述丝杆螺母座46中设有调节丝杆螺母45,所述高度调节丝杆42与调节丝杆螺母45活动连接;所述支撑架27两侧设有线轨47,所述联动固定板49下端两侧上设有线轨滑块48,所述线轨滑块48下端设有与线轨47对应设置的滑槽480;所述高度调节电机41的输出端方向与线轨47的长度方向相同;所述支撑架27前后两端上还设有滑轮固定板240,所述滑轮固定板240上设有与滑轮24,所述底座21上设有与滑轮24对应设置的圆弧导轨29,所述圆弧导轨29与滑轮固定板240之间设有减震板290作为支承。
47.以上设置,进行发射高度调节时,高度调节电机41驱动输出端转动带动高度调节丝杆联轴器43转动,高度调节丝杆联轴器43带动高度调节丝杆42转动,高度调节丝杆42与调节丝杆螺母45形成丝杆螺母传动,调节丝杆螺母45沿着高度调节丝杆42螺母轴向移动,因此带动丝杆螺母座46上的联动固定板49沿着线轨47长度方向移动,联动固定板49移动时会带动联动固定板49上的支撑杆40移动,支撑杆40移动时会带动发射机架31前部移动,又因为发射机架31后部与支撑架27后部通过活动连接,因此,发射机架31后部活动连接的情况下,发射机架31前部高度进行改变,从而对发射高度进行调节,高度调节方式简单可靠;转动时位于支撑架27前后两端的牛眼轮24沿着底座21上的圆弧导轨滑动,支撑架27前后两端的牛眼轮24可以为支撑架27提供足够的支承力,减震板290可以在滑轮24转动时以及飞行器1发射时产生形变可以提供一个预紧力,用来抵消发射时的后坐力和转动时的压力。
48.如图10所示,所述方向稳定机构34包括侧限位板341、侧限位支架342、上导轨343和下导轨344,所述侧限位板341为垂直间隔设置固定在发射通道5两侧并从发射通道5进料口延伸至发射通道5中部,所述侧限位板341之间通过限位固定板327进行固定,所述限位固定板327为l型板,限位固定板327一端设有四个以上的限位凸块,限位凸块与侧限位板341上的限位槽进行卡接固定,所述侧限位板341靠近进料口一侧为端部向外倾斜设置,所述侧限位支架固定于发射通道5两侧与侧限位板342连接并延伸至发射机构一端,所述上导轨343固定于发射通道5上侧,所述上导轨343一侧固定在供料尾部固定件下端,所述上导轨343另一侧固定在发射口一端,上导轨343的数量为一个,下导轨的数量344为两个,上导轨343的一侧位于两个下导轨344之间,所述下导轨344固定于发射通道5下侧,所述下导轨344一端固定在进料口一端,所述下导轨344另一端固定在发射口一端;侧限位板341、侧限位支架342、上导轨343和下导轨344与飞行器1的机身贴合。
49.以上设置,侧限位板341、侧限位支架342、上导轨343和下导轨344与飞行器1的机身贴合,可以稳定发射方向;侧限位板341、侧限位支架342、上导轨343和下导轨344的表面光滑减少摩擦力,侧限位板341靠近进料口一侧为端部向外倾斜设置通过使得进料口方向
开口较大,从而方便进料,而且在进料完之后经过下导轨进行导向,在靠近发射口的一端设置上导轨,上导轨343和下导轨344从发射通道5的上下方向上对飞行器1进入发射口进行限位,能使得飞行器能更好更可靠地进入到发射口内。
50.如图2所示,所述供料发射机架31一侧上设有两个以上间隔设置的微动开关311,供料推板337靠近微动开关311的一侧上设有微动开关触发件312,微动开关311间隔长度与飞行器1长度相同,供料推板337每推动一个飞行器1向前,微动触发件312触碰一个微动开关311。
51.以上设置,供料推板337推动飞行器1对发射机构32进行供料时,每推送一个飞行器1进入发射机构32,供料推板337靠近微动开关311的一侧上微动开关件312与微动开关311接触,微动开关311连接发送启动信号到发射机构32的加速电机322中,加速电机启动322对摩擦轮321进行加速,从而对待发射的飞行器1进行发射操作,触发式开关实现加速发射。
52.如图2所示,所述供料发射机架31上还设有红外瞄准器310,所述红外瞄准器310设于发射口上端,用于发射红外激光照射发射口的发射口方向。
53.以上设置,调整发射口的发射方向可以同过红外瞄准器310发射的红外激光进行判断发射方向,便于观察得到是否对准发射的地点,实现远距离命中目标。
54.以上结构,飞行器1准备发射时,飞行器1存储在供料发射模块3内的发射通道5后端,在发射通道5供料机构33位置两侧设置有侧限位板341和侧限位支架用于贴合飞行器1对供料方向进行限定,在发射通道5发射机机构上下两侧设置上导轨343和下导轨344用于贴合飞行器1并对发射方向进行限定,底座旋转调节模块2中旋转调节电机23的输出端转动带动主动齿轮25转动,主动齿轮25与齿条板25啮合连接,主动齿轮25沿着齿条板25圆弧方向移动,主动齿轮25移动带动旋转调节电机23移动,同时带动与旋转调节电机23固定连接的电机固定板28和圆台转盘22在底座21上沿圆台转盘22圆周方向转动,高度调节模块4中高度调节电机41驱动输出端转动带动高度调节丝杆联轴器43转动,高度调节丝杆联轴器43带动高度调节丝杆42转动,高度调节丝杆42与调节丝杆螺母45形成丝杆螺母传动,调节丝杆螺母45沿着高度调节丝杆42螺母轴向移动,带动丝杆螺母座46上的联动固定板49沿着线轨47长度方向移动,联动固定板49移动时会带动联动固定板49上的支撑杆40移动,支撑杆40移动时会带动发射机架31前部移动,又因为发射机架31后部与支撑架27后部通过销连接,因此,发射机架31后部销固定的情况下,发射机架31前部高度进行改变,从而对发射高度进行调节,方向调整快;供料发射模块3中供料电机331的输出端转动带动供料丝杆联轴器332转动,通过供料丝杆联轴器332带动装填丝杆338转动,装填丝杆338转动带动供料丝杆螺母339沿装填丝杆338轴向移动,装填丝杆338转动带动供料推板往发射机构32方向移动,同时位于装填丝杆338一侧的装填光轴351为供料推板的移动增加稳定性,供料推板337带动下端的供料下板330推动飞行器1沿着发射通道5往发射机构32方向移动,发射机构32中摩擦轮321被加速电机322加速到指定转速后,供料推板337将待发射的飞行器1推向发射机构32内,飞行器1两侧与摩擦轮321摩擦,飞行器1在摩擦轮321的作用下被加速并发射出去,整体补料速度快,上一个飞行器1发射完即可立刻将下一个飞行器1推送至发射机构32进行发射,通过底座旋转调节模块实现发射方向的调整,通过高度调节模块4进行调整发射高度,从而实现对多个方向以及多个高度发射飞行器1,操作简单。
55.如图14所示,本发明一种飞镖发射机工作方法,具体步骤如下:(1)准备发射时,飞行器存储在供料发射模块内的发射通道后端;(2)底座旋转调节模块进行调整发射方向;(3)高度调节模块进行调整发射高度;(4)供料机构推送飞行器,使待发射的飞行器与发射机构接触;(5)发射机构对飞行器进行加速发射;步骤(2)具体包括:(2.1)旋转调节电机的输出端转动带动主动齿轮转动;(2.2)主动齿轮沿着齿条板圆弧方向移动;(2.3)旋转调节电机带动与旋转调节电机固定连接的支撑架和圆台转盘在底座上沿圆台转盘圆周方向转动;步骤(3)具体包括:(3.1)高度调节电机驱动输出端转动带动高度调节丝杆联轴器转动;(3.2)高度调节丝杆联轴器带动高度调节丝杆转动;(3.3)高度调节丝杆转动带动丝杆螺母座上的联动固定板沿着线轨长度方向移动;(3.4)联动固定板移动时会带动联动固定板上的支撑杆移动;(3.5)支撑杆移动时会带动发射机架前部移动,发射机架前部高度进行改变,从而完成对发射高度进行调节。
56.步骤(4)具体还包括:(4.1)供料电机的输出端转动带动供料丝杆联轴器转动;(4.2)供料丝杆联轴器带动装填丝杆转动;(4.3)装填丝杆转动带动供料丝杆螺母沿装填丝杆轴向移动,同时带动供料推杆沿装填丝杆轴向移动;(4.4)供料推板带动下端的供料下板推动飞行器沿着发射通道往发射机构方向移动,推送飞行器进入到发射机构中。
57.步骤(4.3)还包括(4.31)装填丝杆带动供料推杆沿装填丝杆轴向移动,同时,供料推杆沿着位于装填丝杆一侧的装填光轴滑动;步骤(5)具体包括:(5.1)加速电机加速旋转带动摩擦轮加速旋转;(5.2)供料推板将待发射的飞行器推向发射机构内;(5.3)飞行器两侧与摩擦轮摩擦,飞行器在摩擦轮的作用下被加速并发射出去;步骤(4)和步骤(5)之间还包括(6)供料推板每推送一个飞行器进入发射机构,供料推板靠近微动开关的一侧上微动开关触发件与微动开关接触,微动开关连接发送启动信号到发射机构的加速电机中,加速电机启动对摩擦轮进行加速。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
