1.本实用新型涉及禽类养殖设备技术领域,尤其涉及一种禽类性别识别设备。
背景技术:
2.在家禽养殖行业的生产中,禽类养殖场管理者对禽类的性别有严格的要求,所以雏禽的性别鉴定尤为重要。
3.现阶段我国大部分养殖场对禽类进行性别鉴定都是采用翻肛的方法。禽类直肠末端与泌尿和生殖道共同开口于泄殖腔,泄殖腔向外界的开口有括约肌,俗称为肛门。雄性雏禽肛门两则围有“八字状”的皱襞,称为“八字状襞”,泄殖腔下部中央有一颗球状突起,称为“生殖突起”,这两者统称为“生殖隆起”。雄性雏禽的生殖隆起比较明显,充满弹性、表面带有光泽、不易变形;雌性雏禽也有生殖隆起,雌禽的生殖隆起由于遗传、孵化环境等因素使其退化程度不一致,导致生殖隆起形态不一致,实际上大部分雌性雏禽并无隆起,只剩下退化后的残迹。生产中,较适宜识别的时间是出雏后2~12h,在此时间内,雌雄雏禽的生殖突起形状较显著,雏禽也好抓握、翻肛。出壳24h后,雏禽的肛门难以翻开和生殖隆起萎缩,导致翻肛操作难以分辨雌雄,所以进行翻肛识别法一定要在24h内。因此在雏禽出壳后24h 内,技术员可以通过翻开肛门观察“生殖隆起”的有无或形状来识别雏禽的雌雄。在良好的孵化条件下,翻肛识别操作过程包括抓雏、握雏、排粪、翻肛、识别和放雏6个操作环节。
4.翻肛操作对技术人员要求较高,技术员首先需要掌握家禽生理结构的基本理论,其次需要注意操作过程中轻拿轻放,再者需要在光线充足的环境下观察和消毒的条件下操作,较重要的是需要在翻肛过程中手势正确,减少对雏禽的应激;否则会影响禽类的生理机能,导致雏禽的死亡率升高,弱雏比例增大,在生产中则会影响蛋禽的产蛋量和蛋质量、肉禽的出栏时间和肉品质,以及受精率等。
5.虽然翻肛法应用范围较广泛,具有较为方便、快速和准确的优点,但对工人劳动强度要求高且对家禽的应激过大。因此,亟需一种禽类性别识别设备,能够快速、准确地识别禽类性别且人力成本低、家禽应激小。
技术实现要素:
6.本实用新型所要解决的技术问题是提供一种禽类性别识别设备,能够快速、准确地识别禽类性别且人力成本低、家禽应激小。
7.本实用新型解决上述技术问题的技术方案如下:
8.禽类性别识别设备,其包括第一约束构件、第二约束构件、图像采集器、第一处理模块,第一约束构件用于放置禽类,第二约束构件与图像采集器连接,第一约束构件能够至少沿靠近、远离第二约束构件的方向运动和/或第二约束构件能够至少沿靠近、远离第一约束构件的方向运动,图像采集器经禽类泄殖腔进入禽类肠道并在禽类肠道内采集第一图像信息,第一处理模块接收第一图像信息,第一处理模块根据第一图像信息识别禽类性别。
9.本实用新型的有益效果:
10.本实用新型禽类性别识别设备的第一约束构件能够将待识别的禽类固定,第二约束构件与图像采集器相连,第一约束构件与第二约束构件的相向运动能够将图像采集器经禽类泄殖腔送至肠道内,使图像采集器在禽类肠道内采集包含禽类性腺(睾丸或卵巢)的第一图像信息,在第一处理模块根据第一图像信息完成禽类性别识别判断之后,图像采集器再从禽类肠道内移出。首先,相较于“翻肛”操作,禽类的应激小,对禽类的伤害小;其次,识别过程可以实现自动化操作,对工作人员的技术要求很低,人力成本大幅下降。综上,本实用新型禽类性别识别设备能够快速、准确识别禽类性别且人力成本低廉、家禽应激反应小。
附图说明
11.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
12.图1为本实用新型禽类性别鉴别设备整体结构第一角度示意图;
13.图2为图1中ⅰ处的局部放大图;
14.图3为本实用新型禽类性别鉴别设备整体结构第二角度示意图;
15.图4为图3中ⅱ处的局部放大图;
16.图5为本实用新型禽类性别鉴别设备整体结构第三角度示意图;
17.图6为本实用新型禽类性别鉴别设备整体结构第四角度示意图;
18.图7为第二图像信息与目标区域位置关系示意图;
19.图8为禽类身体结构第一角度示意图;
20.图9为禽类身体结构第二角度示意图;
21.图10为禽类身体结构第三角度示意图;
22.图11为第一约束构件整体结构第一角度示意图;
23.图12为第一约束构件整体结构第二角度示意图;
24.图13为图12中ⅲ处的局部放大图;
25.图14为股骨约束构件与胸/腹部约束构件结构第一角度示意图;
26.图15为股骨约束构件与胸/腹部约束构件结构第二角度示意图;
27.图16为股骨约束构件与胸/腹部约束构件结构第三角度示意图(省略部分结构件);
28.图17为股骨约束构件与胸/腹部约束构件结构第四角度示意图(省略部分结构件);
29.图18为股骨约束构件实施例二的结构示意图;
30.图19为股骨约束构件实施例三的结构示意图;
31.图20为股骨约束构件实施例四的结构示意图;
32.图21为头部约束构件实施例一的结构示意图;
33.图22为头部约束构件实施例二的结构示意图;
34.图23为头部约束构件实施例三的结构示意图;
35.图24为头部约束构件实施例四的结构示意图;
36.图25为背部约束构件结构第一角度示意图;
37.图26为背部约束构件结构第二角度示意图;
38.图27为胸/腹部约束构件中腹板的另一实施例结构示意图;
39.图28为脚部约束构件的结构示意图;
40.图29为图像采集器的结构示意图;
41.图30为图像采集器的分解结构示意图;
42.图31为禽类性别识别方法实施例一的流程示意图;
43.图32为禽类性别识别方法实施例二的流程示意图;
44.图33为禽类性别识别方法实施例三的流程示意图;
45.图34为禽类性别识别方法实施例四的流程示意图;
46.图35为禽类性别识别方法实施例五的流程示意图;
47.图36为禽类性别识别方法实施例六的流程示意图;
48.图37为禽类性别识别方法实施例七的流程示意图。
具体实施方式
49.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
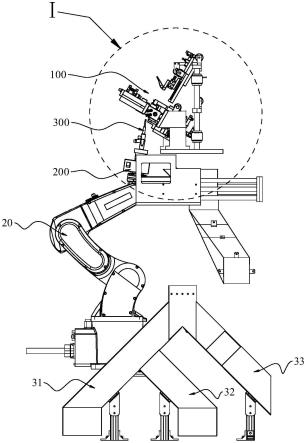
50.如图1至图6所示,本实用新型提供一种禽类性别识别设备,其包括第一约束构件100、第二约束构件200、图像采集器300、第一处理模块(未示出),第一约束构件100用于放置禽类10,第二约束构件200与图像采集器300连接,第一约束构件100能够至少沿靠近、远离第二约束构件200的方向运动和/或第二约束构件200能够至少沿靠近、远离第一约束构件100的方向运动,图像采集器300经禽类10泄殖腔进入禽类10肠道并在禽类10肠道内采集第一图像信息,第一处理模块接收第一图像信息,第一处理模块根据第一图像信息识别禽类性别。
51.对于“靠近、远离”的理解,具体是指第一约束构件100和第二约束构件200(即禽类 10泄殖腔和图像采集器300)彼此间的直线距离的近或远,而不限定具体运动的轨迹,运动轨迹可以为直线、曲线或者直线与曲线相结合。例如,若驱动构件采用气缸或直线电机,则第一约束构件和/或第二约束构件的运动轨迹即为直线;若驱动构件采用多轴机械臂,则第一约束构件和/或第二约束构件的运动轨迹可能为曲线。
52.对于第一约束构件100,其主要用于约束禽类身体(可以采用悬挂、夹紧、压紧、容置等多种方式,包括完全固定或部分固定),同时使禽类的泄殖腔基本朝向图像采集器300方向,具体包括但不限于对禽类股骨、头部、背部、胸部、腹部、脚部任一或组合进行限位的约束结构。
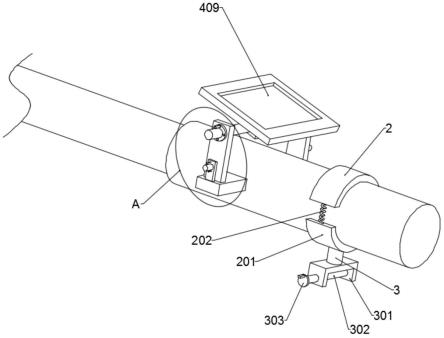
53.对于第二约束构件200,其主要用于约束(同样包括完全固定或部分固定)图像采集器 300,以带动图像采集器300运动。
54.对于“第二约束构件与图像采集器连接”的理解,二者可以采用刚性连接,亦可采用柔性连接,只要能够保证图像采集器300与第二约束构件200整体同步运动即可。对于刚
性连接,图像采集器300与第二约束构件200基本处于同步运动的状态;对于柔性连接,图像采集器300的运动可具有一定的缓冲效果,但整体依然要与第二约束构件200同步运动。
55.对于“第一约束构件能够至少沿靠近、远离第二约束构件的方向运动和/或第二约束构件能够至少沿靠近、远离第一约束构件的方向运动”的理解,至少包括如下三种情况:(1) 第一约束构件100能够至少沿靠近、远离第二约束构件200的方向运动,第二约束构件200 不动;(2)第二约束构件200能够至少沿靠近、远离第一约束构件100的方向运动,第一约束构件100不动;(3)第一约束构件100能够至少沿靠近、远离第二约束构件200的方向运动,且第二约束构件200能够至少沿靠近、远离第一约束构件100的方向运动。
56.对于“图像采集器在禽类肠道内采集第一图像信息”中“采集”的理解,是指禽类10 肠道内的影像以光学图像形式从图像采集器300的前端进入图像采集器300,至于是通过光学元件、光导纤维或者直接由图像传感器300转换为电信号进行传输,均不应做限定,而且这个采集过程可以是从连续影像中选取的某帧也可以直接是单张的静止图像。图像采集器300至少采集一次第一图像信息,但在不同的实施例中,为了提高识别的准确率,可以采集多次第一图像信息。
57.对于“第一处理模块接收第一图像信息”的理解,第一图像信息在被图像采集器300采集之后,以能够被识别的形式(例如电信号)传输至第一处理模块,实现第一处理模块对第一图像信息的接收。第一处理模块优选为由一个或多个集成电路芯片构成的控制器(例如嵌入式微控制器mcu)。
58.对“第一处理模块根据第一图像信息识别禽类性别”的理解,第一处理模块通过将第一图像信息进行识别处理,识别是否具有睾丸或卵巢,进而判断禽类的性别。具体而言,雄性禽类左右两侧睾丸均较为清晰,且具有较为独特的形状;而雌性禽类仅有左侧卵巢较为清晰,右侧卵巢由于变性问题而难以被观察到。基于雄性和雌性禽类睾丸和卵巢前述图像特性,即可作为性别识别的基础原理。例如,图像采集器300在禽类10肠道右侧采集第一图像信息,图像中有较为清晰的睾丸特征,则基本可以判断为雄性,若图像中没有较为清晰的睾丸特征 (右侧退化的卵巢较难观测),则基本可以判断为雌性。
59.优选地,第一约束构件100和/或第二约束构件200由与之连接的驱动构件20进行驱动,但在部分实施例中,亦可采用外力进行驱动,“外力”系指除设备本身之外由其他主体(例如操作者)施加的力。驱动构件20包括但不限于多轴机械臂、气缸、直线电机、传动齿轮、传动带、传动齿条、电机结合丝杆等,只要能够带动第一约束构件100和/或第二约束构件 200(进而带动禽类10泄殖腔和/或图像采集器300)运动即可。在驱动构件20为气缸、直线电机等单轴运动结构时,图像采集器300被配置为在初始位置与禽类10泄殖腔基本正对,驱动构件20带动第一约束构件100和/或第二约束构件200沿直线运动即可将图像采集器300 送入禽类10肠道内进行图像信息采集。而在其他实施例中,为更加精确地将图像采集器300 与泄殖腔准确对位,会将第一约束构件100和/或第二约束构件200进行多轴平移和/或旋转运动,此时的驱动构件20则可选用多轴机械臂(如本实施例所示)或能够实现多轴运动的机械驱动装置。多轴机械臂包括但不限于并联机械手、关节型机械手、悬臂式机械手、龙门式机械手、直立式机械手、横立式机械手、双臂型机械手、scara机械手、蜘蛛型机械手、 ur关节多轴机械手等。
60.对于驱动构件20与第一约束构件100和/或第二约束构件200“连接”的理解,并非
单指构件直接相连,也包括构件间接相连,例如第一约束构件100与驱动构件20之间、或第二约束构件200与驱动构件20之间存在多个中间构件,此种间接连接且同步运动的方式亦为“连接”。进而特别说明的是,在本实用新型中,所有的“连接”均是指两个或两个以上构件之间本质上形成连接的状态,不仅包括直接连接,亦包括间接连接,即两个或多个构件不直接连接,而是之间通过一个或多个构件间接连接,进而实现物理上的连接结构。
61.对于“驱动构件与第一约束构件和/或第二约束构件连接”,至少包括如下四种情况:(1) 同一驱动构件20与第一约束构件100和第二约束构件200同时连接;(2)驱动构件20与第一约束构件100连接,与第二约束构件200不连接;(3)驱动构件20与第二约束构件200 连接,与第一约束构件100不连接;(4)第一约束构件100、第二约束构件200分别与不同的驱动构件20连接。
62.优选地,驱动构件20的运动由第二处理模块控制。第二处理模块亦优选为由一个或多个集成电路芯片构成的控制器。在不同的实施例中,第一处理模块和第二处理模块可设定为不同的芯片或者芯片组(即共同实现功能的多个芯片),也可设定为同一芯片或者芯片组但能同时实现第一处理模块识别图像的功能以及第二处理模块控制驱动构件运动的功能,换言之,第一处理模块与第二处理模块可以在物理形态上采用同一或多个单元,也可以在物理形态上采用不同的两个单元。
63.优选地,图像采集器300在进入禽类10泄殖腔之前,对禽类10的泄殖腔采集第二图像信息,第一处理模块根据第二图像信息判断图像采集器300与禽类10泄殖腔的相对位置,第二处理模块通过控制驱动构件20的运动,进而控制第一约束构件100和/或第二约束构件 200的运动,以调整禽类10泄殖腔和/或图像采集器300的相对位置。同采集第一图像信息的过程类似,采集过程可以是从连续影像中选取的某帧也可以直接是单张的静止图像,既包括图像采集器300在相对运动过程中实时采集,也包括图像采集器300在相对运动停止时进行采集,只要是在进入禽类10泄殖腔之前采集即可。图像采集器300至少采集一次第二图像信息,但在不同的实施例中,为了提高识别的准确率,可以采集多次第二图像信息。
64.如图7所示,本优选实施例中,图像采集器300采集的第二图像信息呈矩形,矩形水平侧边为长(长度定义为a0),竖直侧边为宽(宽度定义为b0)。以水平侧边(或平行于水平侧边)的轴定义为a轴,以竖直侧边(或平行于竖直侧边)且与a轴相交的轴定义为b轴。本实施例中,“第一处理模块根据第二图像信息判断图像采集器与禽类泄殖腔的相对位置”是指将第二图像信息中泄殖腔外接矩形中心与第二图像信息中心在ab平面的位置对比来判断图像采集器300与禽类10泄殖腔的相对位置。当然,第二图像信息也可以设置为水平侧边为宽,竖直侧边为长,坐标轴以及其他定义均做适应性调整即可。
65.第一约束构件100与第二约束构件200相互靠近时,第一处理模块根据第二图像信息判断图像采集器300与禽类10泄殖腔之间的距离。本实施例中,可以从泄殖腔外接矩形在第二图像信息中的长度、宽度所占比例进行判断,所占比例越大,距离越小。
66.具体而言,通过预训练的机器学习模型,第一处理模块识别出包含禽类泄殖腔的目标区域,目标区域可以设置为矩形、正方形、圆形或椭圆形等形状。本较佳实施例中,目标区域优选为能够包含泄殖腔的最小矩形区域,泄殖腔的中心位置基本与最小矩形区域的中心重合或接近重合,将目标区域的长定义为δa,宽定义为δb。
67.第一处理模块计算目标区域的中心o1与第二图像信息的中心o2在ab平面的坐标差
值,用o1的坐标(a1,b1)分别对应减去o2的坐标(a2,b2)后取绝对值,再分别除以第二图像信息对应的长a0与宽b0,得到两个比值r1、r2,即r1=∣a
1-a2∣/a0,r2=∣b
1-b2∣/b0,r1与第一阈值比较,r2与第二阈值比较,第一处理模块将比较结果传输给第二处理模块,第二处理模块根据比较结果控制驱动构件20运动,进而控制第一约束构件100和/或第二约束构件200 在ab平面运动。优选地,第一阈值等于第二阈值,数值可以取为0.04或其他合理数值;r1小于0.04(第一阈值)表示a轴对准,r2小于0.04(第二阈值)表示b轴对准。若没有对准, (a
1-a2)或(b
1-b2)为正数时,则要分别向a轴或b轴负方向移动,(a
1-a2)或(b
1-b2)为负数时,则要分别向a轴或b轴正方向移动。
68.图像采集器300前端对准泄殖腔后停止ab平面的相对运动,对于“对准”的理解,理想状态下,是指第二图像信息中心与第泄殖腔外接矩形的中心完全重合,实际中二者之间在a轴和b轴方向的距离小于一定的阈值即可认定已“对准”。
69.第一处理模块计算目标区域长δa与第二图像信息长a0的比值r3,计算目标区域宽δb与第二图像信息宽b0的比值r4,将r3、r4均与第三阈值(第三阈值可以取为0.45或其他合理数值)比较,第一处理模块将处理结果传输给第二处理模块,第二处理模块根据比较结果控制驱动构件运动。若r3、r4中较大值小于第三阈值,则第二处理模块驱动图像采集器300靠近泄殖腔;若r3、r4中较大值大于或等于第三阈值,则第二处理模块停止驱动图像采集器300 靠近泄殖腔。
70.在第一约束构件100和/或第二约束构件200运动过程中,由于禽类身体的晃动,禽类 10泄殖腔的位置可能发生改变,故优选地,图像采集器300实时采集第二图像信息,第一处理模块实时根据第二图像信息判断图像采集器300与禽类10泄殖腔的相对位置,第二处理模块根据第一处理模块的处理结果实时对图像采集器300与禽类10泄殖腔的相对位置进行调整。
71.为提高识别的准确率,图像采集器300采集第一图像信息后,驱动构件20带动第一约束构件100和/或第二约束构件200移动,使图像采集器300的前端相对于采集第一图像信息的位置向周围至少一个方向运动0-2mm,图像采集器300再采集第三图像信息,第一处理模块根据第三图像信息识别禽类性别。
72.对于“图像采集器的前端相对于采集第一图像信息的位置向周围至少一个方向运动0-2mm”的理解,至少包括三种情况:(1)第二约束构件200不动,驱动构件20带动第一约束构件100移动;(2)第一约束构件100不动,驱动构件20带动第二约束构件200移动; (3)第一约束构件100和第二约束构件200均在驱动构件20带动下移动;进而使图像采集器300在禽类10肠道内相对运动。
73.具体而言,以第二约束构件200带动图像采集器300的前端在禽类10肠道内向前运动 1mm(0至2mm范围之间的数值)为例,其指图像采集器300前端在第二约束构件200带动下以采集第一图像信息的位置为基准,在禽类10肠道内向远离泄殖腔方向运动1mm,在图像采集器300前端移动过程中,图像采集器300实际上可以同时采集肠道内部图像信息,“第三图像信息”可以是移动1mm过程中某个位置的图像信息,也可以设定为图像采集器 300前端到达向前运动1mm位置时的图像信息;同样地,以第二约束构件200带动图像采集器100的前端在禽类10肠道内向后运动1mm为例,是指图像采集器300前端在第二约束构件100带动下以采集第一图像信息的位置为基准,在禽类10肠道内向靠近泄殖腔方向运动1mm,“第三图像
信息”是图像采集器300移动过程中某个位置或者是图像采集器300移动至1mm位置时的影像。图像采集器300至少采集一次第三图像信息,但在不同的实施例中,为了提高识别的准确率,可以采集多次第三图像信息。
74.如图8至图10所示,为便于解释实施例中空间运动位置关系,将基本沿连接禽类10两侧股骨延伸的方向定义为第一方向(x轴),与第一方向相交且垂直、基本沿禽类10泄殖腔至头部延伸的方向定义为第二方向(y轴),经过第一方向和第二方向交点、基本垂直于第一方向和第二方向所在平面的方向定义为第三方向(z轴),对应绕x轴旋转定义为r
x
,绕 y轴旋转定义为ry,绕z轴旋转定义为rz。
75.上述实施例中,图像采集器300在禽类10肠道内向前/或向后运动(即第二方向)主要是针对第一约束构件100和/或第二约束构件200仅能提供单自由度运动的结构,而在其他实施例中,驱动构件20为多轴机械臂等可多自由度运动的结构,图像采集器300在采集第一图像信息后,驱动机构20可带动第一约束构件100和/或第二约束构件200运动,使图像采集器300的前端在禽类10肠道内以采集“第一图像信息”的位置为中心向其他方向(例如x轴、y轴、z轴、以及r
x
、ry、rz六轴中的任意一轴或任意组合)运动0-2mm,以使图像采集器300从多角度、多空间位置采集第三图像信息,第一处理模块再根据第三图像信息识别禽类性别,从而提高性别识别的准确率。
76.如图8至图10所示,本实施例中对禽类10身体进行限定位置的大概部位对应如下:股骨11、头部12、背部13、胸部14、腹部15、脚部(未示出)。本实用新型中,股骨11主要是指股骨11整体所在的部位,并非直接指“股骨”本身,因为“股骨”外围包覆有肌肉、皮肤等组织,“股骨”本身并不显露。
77.优选地,第一约束构件限定为至少能对禽类的股骨11、头部12、背部13、胸部14、腹部15、脚部之一或组合进行约束,这样能够使禽类的身体整体保持稳定且泄殖腔的位置保持基本一致,提高图像采集器300进入禽类10肠道的成功率。
78.图11至图17示出第一约束构件100对禽类10股骨11约束的实施例一,第一约束构件 100包括股骨约束构件110,股骨约束构件110配置为在第一方向和/或第二方向约束禽类10 躯体两侧的股骨11。具体而言,第一约束构件110包括股骨挡板111及挡板驱动件。两侧股骨挡板111的形状可以如此实施例所示的“八字”型,也可以设置为两侧均为直线、圆弧状、仿形或杆状,只要能够将禽类10的股骨11进行限位即可。挡板驱动件可以设置为如此实施例所示的两侧联动结构,具体包括联动齿轮113、与联动齿轮113配合的联动齿条114以及复位弹簧115。对于挡板驱动件的联动结构,亦可采用连杆结构,同步驱动两侧股骨挡板111 的运动。
79.图18示出第一约束构件100对禽类10股骨11约束的实施例二,与前述股骨约束实施例一不同的是股骨挡板116由单层设置为具有一定间隔的双层,其能够有效避免禽类10股骨11沿第二方向(y轴)活动。
80.图19示出第一约束构件100对禽类10股骨11约束的实施例三,与前述股骨约束实施例一不同的是挡板驱动件为旋转气缸118,第一股骨挡板119与第二股骨挡板120的延伸端与旋转气缸118抵接,旋转气缸118的旋转能够实现第一股骨挡板119与第二股骨挡板120 联动的开合动作。
81.图20示出第一约束构件100对禽类10股骨11约束的实施例四,与前述股骨约束实
施例一不同的是挡板驱动件为两个单独驱动结构,如两侧第一股骨挡板122和第二股骨挡板 123分别连接有第一挡板气缸124和第二挡板气缸125,当然也可以分别采用其他能够实现往复运动的驱动部件,例如直线电机、电缸等。
82.优选地,第一约束构件还包括推动构件,推动构件设置于股骨约束构件背离禽类头部的一侧,用于至少沿第二方向推动禽类的躯体,使禽类的股骨抵靠于股骨约束构件。推动构件推禽类的位置优选为包含股骨的腿部位置,在不同的实施例中,亦可推两股骨与泄殖腔之间的任一部位,只要能够对股骨处直接或间接施加挤压力即可。
83.图21示出第一约束构件100对禽类10头部12约束的实施例一,第一约束构件100包括头部约束构件130,头部约束构件130沿第二方向(y轴)设置于股骨约束构件110的一侧,用于至少沿第二方向(y轴)向背离禽类10躯体的方向约束禽类10的头部12。具体而言,第一约束构件100包括头部固定件131,头部固定件131具有u字型或v字型的头部容置槽132。在此实施例中,头部固定件131分为能够开合的第一头部固定件135和第二头部固定件136,当第一头部固定件135与第二头部固定件136闭合时用于容置禽类10头部 12,当第一头部固定件135与第二头部固定件136分离时用于落禽。优选地,第一约束构件 100还包括与头部固定件131连接的头部驱动件137,头部驱动件137优选为滑轮结构(滑轮线未示出),其能够使头部固定件131将禽类10头部12适当拉紧。
84.图22示出头部约束构件130的实施例二,第一约束构件100还包括与头部固定件131 配合进行限位的头部限位块134,头部限位块134与头部容置槽132配合形成容置禽类头部 12的空间。
85.图23示出头部约束构件130的实施例三,头部容置槽132内设有头部约束气孔133,头部约束气孔133在固定禽类10头部12时吸气和/或在完成性别识别之后需要落禽时吹气。
86.图24示出头部约束构件130的实施例四,第一约束构件100包括头部型腔141以及与头部型腔141连接的夹紧块142,禽类10头部12置于头部型腔141内时,夹紧块142旋转抵压禽类10头部12或脖颈部位,即可实现禽类10头部12的固定约束。
87.在其他实施例中,第一约束构件包括头部吸盘,头部吸盘吸附禽类的头盖骨或嘴部位置,进而约束、固定禽类头部。
88.图25、26示出第一约束构件100对禽类10背部13约束的实施例,第一约束构件100 包括背部约束构件150,背部约束构件150配置为在第三方向(z轴)约束禽类10躯体的背部13。具体而言,第一约束构件100包括背板151以及驱动背板151运动的背板驱动件152,背板151可以设置为直板、仿形、波浪形或弧形等形状。优选地,背板151设有背板气孔 153,背板气孔153的负压能够使禽类10背部13与背板151贴紧,背板气孔153优选分为对禽类10胸椎和/或骼骨位置基本对应的第一背板气孔154以及对禽类10尾椎位置基本对应的第二背板气孔155。在其他实施例中背板气孔153可以由与背板151连接的背板吸盘替代,背板吸盘同样可以提供吸附禽类10背部13的负压。背板驱动件152优选为气缸,其能够使背板151沿靠近、或远离禽类10背部13的方向运动。
89.图11至图17示出第一约束构件100对禽类10胸部14和/或腹部15约束的实施例,第一约束构件100还包括胸/腹部约束构件160,胸/腹部约束构件160配置为在第三方向约束禽类10躯体的胸部14和/或腹部15。具体而言,第一约束构件100包括腹板161以及驱动腹板161运动的腹板驱动件162,腹板161可以设置为u型槽、平板、仿形或弧形槽等形状。本实施
例中,腹板驱动件162为滑轮结构(滑轮线未示出),其能够使腹板161沿靠近、或远离禽类10胸部14和/或腹部15的方向运动。
90.如图27所示,优选地,腹板161设有腹板气孔163,腹板气孔163能够提供正压以辅助落禽。
91.图28示出第一约束构件100对禽类10脚部约束的实施例,第一约束构件100包括脚部约束构件170,脚部约束构件170对禽类10的脚部进行约束,避免禽类10产生蹬踹动作。具体而言,第一约束构件100包括脚部限位板171,脚部限位板171设有脚部限位槽172,脚部限位槽172可以设置为u型、v型、方形、半圆形等形状。优选地,第一约束构件100 还包括脚部挡块173,脚部挡块173可活动设置于脚部限位槽172处,脚部挡块173与脚部限位槽172扣合形成容置禽类10脚踝的限位空间,脚部挡块173优选能够沿第一方向(x 轴)运动,在其他的实施例中,脚部挡块173亦可设置为可绕x或y或z轴旋转,只要能够实现其与脚部限位槽172呈打开状态即可。优选地,第一约束构件100还包括脚部推出板 176,脚部推出板176与脚部挡块173联动设置,在脚部推出板176将禽类10脚踝向外推出时,脚部挡块173同时联动打开。为拉直禽类10脚部,第一约束构件100还包括与脚部限位板171连接的脚板驱动件174,脚板驱动件174优选为气缸,其能够使脚部限位板171沿靠近、或远离禽类10躯体的方向运动。
92.以上列举了多种第一约束构件100的实施例,实施例中有多处需要动力结构,在实施本实用新型技术方案时,第一约束构件100的动力结构可以从如下方式中选择一种或多种,但也不局限于此:(1)滑轮 重力结构、(2)恒力弹簧、(3)凸轮 弹簧、(4)低摩擦气缸、(5) 电机 (同步带,丝杆,齿轮齿条,连杆)、(6)液压、(7)弹簧、(8)氮气弹簧、(9)气缸 (摩擦力不稳定)、(10)电缸、(11)磁性体。
93.其他实施例中,在第一约束构件100对禽类10股骨11、头部12、背部13、胸部14、腹部15、脚部之一或组合进一步约束的基础上,禽类识别设备还包括轨迹构件,轨迹构件与第一约束构件100和/或第二约束构件200连接并限定第一约束构件100和/或第二约束构件200的运动轨迹。轨迹构件可以采用直线轴承、(直线、曲线、环形)导轨、磁悬浮导轨、 (滑台、b型)气缸等,其能够限定、引导第一约束构件100和/或第二约束构件200进行运动,而第一约束构件100和/或第二约束构件200的运动动力可以由驱动构件20提供,也可以由外力驱动,同前述,“外力”系指除设备本身之外由其他主体(例如操作者)施加的力。
94.图像采集器300是用于经泄殖腔进入禽类10肠道采集图像信息的。如图29、图30所示,在此较佳实施例中,图像采集器300包括采集镜头301以及与采集镜头301光学连接的相机模块302,相机模块302内设有图像传感器(未示出),光学图像通过图像传感器转换为第一图像信息后传输至第一处理模块。在其他实施例中,图像采集器300可通过光导纤维将前端的图像传输至图像传感器,再转换为电信号;或者将图像传感器直接装设于图像采集器300的前端,将光能转化为电能之后直接以电信号方式进行传输。
95.在其他实施例中,图像采集器300包括采集镜头301及镜头罩303,镜头罩303呈透明或半透明状。镜头罩303的材质可以选择玻璃、聚甲基丙烯酸甲酯(pmma)、聚苯乙烯(ps)、聚碳酸脂(pc)等。镜头罩303能够对采集镜头301起保护作用,降低采集镜头301损坏概率;且镜头罩303能够防止禽类10肠道内的粪便等覆盖采集镜头301,保证采集镜头301 能够采集相应的图像信息。
96.优选地,镜头罩303前端呈膨大状。禽类10的肠壁本身为半透明状态,镜头罩303呈膨大状能够进一步撑大禽类10的肠壁,使镜头罩303与肠壁贴紧,且能够使肠壁与睾丸或卵巢更近,透过肠壁观测禽类10性腺的图像更加清晰。
97.优选地,镜头罩303分为置于禽类10肠道内部的内分段以及置于禽类泄殖腔外部的外分段(图像采集器300采集第一图像信息时),采集镜头301置于内分段内。镜头罩303具有延伸至外部的外分段,能够更加有效地保护采集镜头301不受粪便的粘附,通常情况优选将采集镜头301设置于内分段中,以使采集镜头301具有更加清晰的视野;但若采集镜头 301的性能较强,采集镜头301也可置于外分段内(即采集镜头301在禽类泄殖腔之外通过镜头罩303撑开的空间对禽类10肠道内的图像信息进行采集),只要能保证采集到清晰的包含性腺的图像信息即可。
98.优选地,镜头罩303呈封闭状或镂空状。
99.本实用新型禽类性别识别设备还包括清洗端口(未示出),清洗端口对图像采集器300 喷出流体(包括但不限于气流、水流等)。在图像采集器300采集完图像信息、从禽类肠道内移出后,其可能从禽类肠道内粘附粪便,清洗端口喷出的流体能够对图像采集器300表面粘附的粪便进行清洗,避免影响下次识别操作,提高识别的准确率。
100.本实用新型禽类性别识别设备还包括消毒端口(未示出),消毒端口对图像采集器300 喷出消毒剂。图像采集器300直接与不同的雏禽肠道直接接触,若未进行消毒处理,则可能导致雏禽传染病的传播,消毒端口对图像采集器300进行消毒能够有效降低传染病的传播机率。
101.为保证设备的稳定性与美观性,禽类性别识别设备还设有底座(未示出),第一约束构件100与第二约束构件200均与底座连接。对于第一约束构件100、第二约束构件200与底座连接的理解,包括直接连接与间接连接。例如,若第一约束构件100不运动,则其可与底座直接连接;若第一约束构件100由驱动构件20驱动,则其先与驱动构件20连接,而驱动构件20与底座直接连接,进而第一约束构件100与底座实现间接连接;同样地,第二约束构件200也可通过直接或间接方式与底座连接。
102.本实用新型禽类性别识别设备还包括用于引导雄性雏禽下落的第一分选通道31、用于引导雌性雏禽下落的第二分选通道32以及用于引导未识别禽类下落的第三分选通道33。
103.图31示出了禽类性别识别方法的实施例一,包括如下步骤:s11.第一约束构件被放置禽类;s12(a).第一约束构件至少沿靠近、远离第二约束构件的方向运动和/或s12(b).第二约束构件能够至少沿靠近、远离第一约束构件的方向运动;s13.与第二约束构件连接的图像采集器经禽类泄殖腔进入禽类肠道;s14.图像采集器在禽类肠道内采集第一图像信息;s15.第一处理模块接收第一图像信息;s16.第一处理模块根据第一图像信息识别禽类性别。
104.图32示出了禽类性别识别方法的实施例二,包括如下步骤:s21.第一约束构件被放置禽类;s22(a).驱动构件带动第一约束构件或s22(b).驱动构件带动第二约束构件运动;s23(a). 第一约束构件至少沿靠近、远离第二约束构件的方向运动和/或s23(b).第二约束构件能够至少沿靠近、远离第一约束构件的方向运动;s24.与第二约束构件连接的图像采集器经禽类泄殖腔进入禽类肠道;s25.图像采集器在禽类肠道内采集第一图像信息;
s26.第一处理模块接收第一图像信息;s27.第一处理模块根据第一图像信息识别禽类性别。
105.图33示出了禽类性别识别方法的实施例三,包括如下步骤:s31.第一约束构件被放置禽类;s32.第二处理模块控制驱动构件运动;s33(a).驱动构件带动第一约束构件和/或s33(b). 驱动构件带动第二约束构件运动;s34(a).第一约束构件至少沿靠近、远离第二约束构件的方向运动和/或s34(b).第二约束构件能够至少沿靠近、远离第一约束构件的方向运动;s35.与第二约束构件连接的图像采集器经禽类泄殖腔进入禽类肠道;s36.图像采集器在禽类肠道内采集第一图像信息;s37.第一处理模块接收第一图像信息;s38.第一处理模块根据第一图像信息识别禽类性别。
106.图34示出了禽类性别识别方法的实施例四,包括如下步骤:s41.第一约束构件被放置禽类;s42.图像采集器在进入禽类泄殖腔之前,图像采集器对禽类的泄殖腔采集第二图像信息,第一处理模块根据第二图像信息判断图像采集器与禽类泄殖腔的相对位置;s43.第二处理模块控制驱动构件运动;s44(a).驱动构件带动第一约束构件和/或s44(b).驱动构件带动第二约束构件运动;s45(a).第一约束构件至少沿靠近、远离第二约束构件的方向运动和/或 s45(b).第二约束构件能够至少沿靠近、远离第一约束构件的方向运动;s46.与第二约束构件连接的图像采集器经禽类泄殖腔进入禽类肠道;s47.图像采集器在禽类肠道内采集第一图像信息;s48.第一处理模块接收第一图像信息;s49.第一处理模块根据第一图像信息识别禽类性别。
107.图35示出了禽类性别识别方法的实施例五,包括如下步骤:s51.第一约束构件被放置禽类;s52.第一约束构件至少对禽类的股骨进行约束;s53(a).第一约束构件被外力驱动沿轨迹构件限定的轨迹运动和/或s53(b).第二约束构件被外力驱动沿轨迹构件限定的轨迹运动;s54(a).第一约束构件至少沿靠近、远离第二约束构件的方向运动和/或s54(b).第二约束构件能够至少沿靠近、远离第一约束构件的方向运动;s55.与第二约束构件连接的图像采集器经禽类泄殖腔进入禽类肠道;s56.图像采集器在禽类肠道内采集第一图像信息;s57.第一处理模块接收第一图像信息;s58.第一处理模块根据第一图像信息识别禽类性别。
108.图36示出了禽类性别识别方法的实施例六,包括如下步骤:s601.第一约束构件被放置禽类;s602.图像采集器在进入禽类泄殖腔之前,图像采集器对禽类的泄殖腔采集第二图像信息,第一处理模块根据第二图像信息判断图像采集器与禽类泄殖腔的相对位置;s603.第二处理模块控制驱动构件运动;s604(a).驱动构件带动第一约束构件和/或s604(b).驱动构件带动第二约束构件运动;s605(a).第一约束构件至少沿靠近、远离第二约束构件的方向运动和/或s605(b).第二约束构件能够至少沿靠近、远离第一约束构件的方向运动;s606.与第二约束构件连接的图像采集器经禽类泄殖腔进入禽类肠道;s607.图像采集器在禽类肠道内采集第一图像信息;s608.第一处理模块接收第一图像信息;s609.第一处理模块根据第一图像信息识别禽类性别;s610.图像采集器从禽类泄殖腔移出,清洗端口对图像采集器喷出流体; s611.消毒端口对图像采集器喷出消毒剂;s612.雏禽落入对应的分选通道。
109.图37示出了禽类性别识别方法的实施例七(未示出s712至s714),包括如下步骤:s701. 第一约束构件被放置禽类;s702.图像采集器在进入禽类泄殖腔之前,图像采集器对
禽类的泄殖腔采集第二图像信息;s703.第一处理模块识别出包含泄殖腔的目标区域;s704(a).用目标区域的中心o1的坐标(a1,b1)分别对应减去第二图像信息的中心o2的坐标(a2,b2)后取绝对值,再分别除以第二图像信息对应的长a0与宽b0,得到两个比值r1、r2,比值r1与第一阈值比较,比值r2与第二阈值比较;s704(b).第一处理模块计算目标区域的长δa与第二图像信息的长a0的比值r3,计算目标区域的宽δb与第二图像信息的宽b0的比值r4,将比值r3、比值r4与第三阈值比较;s705.第二处理模块控制驱动构件运动;s706(a).驱动构件带动第一约束构件和/或s706(b).驱动构件带动第二约束构件运动;s707(a).第一约束构件至少沿靠近、远离第二约束构件的方向运动和/或s707(b).第二约束构件能够至少沿靠近、远离第一约束构件的方向运动;s708.与第二约束构件连接的图像采集器经禽类泄殖腔进入禽类肠道;s709. 图像采集器在禽类肠道内采集第一图像信息;s710.第一处理模块接收第一图像信息;s711. 第一处理模块根据第一图像信息识别禽类性别;s712.图像采集器从禽类泄殖腔移出,清洗端口对图像采集器喷出流体;s713.消毒端口对图像采集器喷出消毒剂;s714.雏禽落入对应的分选通道。
110.尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在本实用新型的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。