一种基于高斯分布qpso算法的工程优化求解方法
技术领域
1.本发明涉及计算机人工智能技术领域,具体但不限于涉及一种基于高斯分布qpso算法的工程优化求解方法。
背景技术:
2.大多数工程优化问题(eops)都可以归结为约束优化问题(cops),cops包含限制可行搜索区域的多个不同约束(即,相等约束和不平等约束)。由于cops通常具有混合、连续或离散的目标函数和非线性约束,因此它们比无约束优化问题更难解决。
3.一般来说,有两种解决cops的方法,分别是传统的数学编程方法和元启发式算法(mhas)。目前已经实现了各种传统的数学规划方法来解决诸如线性规划、同质线性规划、整数规划、动态规划和非线性规划等问题,这些方法使用梯度信息来搜索初始起点附近的解决方案空间。通常,基于梯度的方法收敛得更快,并且可以获得比局部搜索任务上的随机方法更高的精度。但是,由于cops通常不是连续函数,因此很难找到一个好的初始点并计算复杂的导数。相反,随机优化方法的mha已经显示出解决cop的显着性能。通过在搜索空间中使用概率采样而不是确定性搜索规则来更新当前解决方案,mha可以在执行优化任务时探索和检测搜索空间中的有希望的区域。各种各样的mhas被用来处理cops,其中包括遗传算法(ga)、粒子群优化(pso)、社会文明算法(sc)和微分进化(de)等。最近,提出了一些替代辅助进化算法,如全局和局部替代辅助de方法和替代辅助分类协作de方法,以降低解决昂贵cops的计算成本。
4.在所有这些mha中,规范pso已被广泛用于解决复杂的优化问题,因为它具有快速的搜索速度,强大的全局搜索能力以及易于实现的特点。然而,在一些复杂的情况下,特别是在解决高维度和多约束条件的cops时,经常出现鲁棒性不足,收敛过早和开发pso不平衡的情况。为了缓解这些问题,已经提出了许多改进的pso方法。这些pso变体的目标主要是防止过早收敛并提高收敛速度。他和王介绍了一种有效的协同进化粒子群优化(cpso)算法来解决cop。杨修改了粒子的更新公式,提出了提出了加速粒子群优化(apso),apso从规范的pso中去除了粒子速度矢量,因此群的粒子仅由它们的位置矢量表示。随后,najeh将粒子的记忆结合起来以增加群体多样性,并提出了一种改进的加速粒子群优化iapso,它在许多cop上表现良好。为了捕获粒子的所有邻居的信息,研究人员提出了有限信息pso(lipso)。与完全基于信息的pso(fipso)相比,该算法使用相对有限的源提供足够的信息。ran等人提出了一种用于大规模全局优化问题的竞争群体优化器(cso),其中每个粒子的个人最佳位置和全局最佳位置都不涉及更新粒子。通过结合最佳人类学习策略寻找最优解,tanweer等人提出了一种自调节粒子群优化(srpso)算法。此外,受物理理论的启发,一些研究人员对经典pso模型进行了一些修改。例如,量子行为粒子群优化(qpso)算法是pso的一种变体,在解决无约束优化问题方面表现出了卓越的性能。coelho提出了高斯量子行为粒子群优化(gqpso)算法,以提高qpso在搜索过程后期的局部搜索能力。在g-qpso算法中,对于qpso的随机系数,通过具有零均值和单位方差的高斯分布生成随机数,使得粒子可以避免远离当
前位置移动并逃离局部最小值。随机漂移粒子群优化(rdpso)是受放置在外部电场中的金属导体中的自由电子模型启发的另一种pso变体。添加一些算子或将其他现有算法与规范pso模型相结合以生成新的混合算法是提高pso算法性能的另一种有效且重要的方法。例如,khamsawang等人提出了一种混合pso-de算法来提高pso的局部搜索能力,该算法在经济调度问题上表现良好。遗传学习粒子群优化算法(glpso)使用遗传进化为pso培育了有前途的示例,文献中42个基准函数的glpso和其他测试算法的性能比较验证了算法的有效性、效率、鲁棒性和可扩展性。
5.由于eop有很多限制,可行区域的景观非常复杂,当存在平等约束时,全局最优点通常位于可行区域的边界上。因此,为了使候选解落入可行区域并尽可能收敛到全局最优点,算法在搜索过程的后期具有较强的局部搜索能力是必不可少的。被称为概率算法的qpso使用基于量子三角洲势阱模式的策略来采样先前最佳点周围的粒子位置,并采用平均最佳位置来吸引粒子,以便全局和局部搜索能力粒子平衡良好。因此,与大多数现有的pso变体相比,qpso算法在执行大多数优化任务方面表现出更好的鲁棒性。然而,由于算法的强随机性,qpso在搜索过程的后期具有相对较弱的局部搜索能力。改进算法的直接方法是修改qpso算法的更新公式,gqpso是代表。与qpso相比,gqpso增强了qpso的本地搜索能力,并在eop上获得了更好的结果。但是,该算法牺牲了其全局搜索能力以实现更快的收敛速度。
6.有鉴于此,需要提供一种新的方法,以期解决上述至少部分问题。
技术实现要素:
7.针对工程优化问题中出现的种群容易过早收敛以及后期局部搜索能力差的问题,本发明提出了一种基于高斯分布qpso算法的工程优化求解方法,有效提高解决工程优化问题的有效性和鲁棒性。
8.实现本发明目的的技术解决方案为:
9.在搜索过程中,qpso算法使粒子以一定的概率到达搜索空间中的任何位置。然而,尽管该算法具有很强的全局搜索能力,但其局部搜索能力在搜索过程的后期通常会减弱。特别是在求解eop时,由于算法的随机性,qpso中的粒子倾向于远离全局最佳位置的小邻域。因此,为了在搜索过程的后期提高qpso算法的局部搜索能力,引入高斯概率分布以使粒子以增加的概率出现在其局部吸引子附近的区域。
10.然而,具有大方差的高斯分布具有强随机性,这使得生成的序列中的随机数分布在宽范围内。结果,粒子群在早期搜索阶段可能处于发散状态,这导致算法的较低收敛速度。此外,粒子群的搜索方向应根据群中每个粒子的重要性来指导,这可以通过加权平均最佳位置来反映,每个个人最佳位置的权重代表这种重要性。为此目的,该算法根据它们自己的ed(p
i,t
,g
t
),即粒子i的个人最佳位置与当前全局最佳位置g
t
之间的欧几里得距离,在每次迭代中给出粒子不同的权重。
11.在ig-qpso算法中,迭代t处的粒子i的权重系数由a
i,t
表示,计算如下:
[0012][0013]
因此,igqpso中粒子的更新方程是:
[0014]
[0015]
其中
[0016][0017][0018]
其中,是迭代t时个人最佳位置的加权平均值,是由高斯分布产生的随机数,在迭代t时具有零均值和方差σ
t
。和c
t
分别表示粒子i的局部吸引子和迭代t时个人最佳位置的平均值,并且在qpso中被定义为相同。式(2)中的参数β固定为0.75,这在本发明中根据经验设定。高斯概率分布的方差σ线性下降。较小的σ使算法具有较强的局部搜索能力,因为粒子的更新位置相对更接近其局部吸引子点且概率更高。相反,较大的σ使得算法在搜索过程中具有较强的全局搜索能力。从理论上讲,ig-qpso算法不仅可以在搜索过程的早期阶段保持较强的全局搜索能力和适当的收敛速度,而且还可以在后期增强局部搜索能力,从而使算法更加适用于解决eop。
[0019]
本发明提出的一种基于高斯分布qpso算法的工程优化求解方法的步骤如下面的算法一所示:
[0020][0021]
本发明采用以上技术方案与现有技术相比,具有以下技术效果:
[0022]
1、本发明的基于高斯分布qpso算法的工程优化求解方法,通过改变高斯分布以生成随机序列数来提供粒子出现在其局部吸引子附近区域中的可能性增加,因此,它不仅在搜索过程的早期阶段保持了qpso的全局搜索能力,而且在后期也增强了本地搜索能力。
[0023]
2、考虑到粒子重要性之间的差异,本发明的基于高斯分布qpso算法的工程优化求解方法提出了一种新的策略,即:使用加权平均最佳位置来替换规范qpso中的位置,ig-qpso对接近当前全球最佳解决方案的粒子给出了更大的权重系数,这使得重要粒子能够指导粒子群的搜索方向。
[0024]
3、与规范qpso算法中的平均最佳位置相比,本发明的基于高斯分布qpso算法的工程优化求解方法中的加权平均最佳位置更接近当前全局最佳解决方案,这导致粒子快速聚集到全局最佳位置附近的区域。
[0025]
4、本发明的基于高斯分布qpso算法的工程优化求解方法减轻了高斯分布带来的大方差算法的随机性,进一步加快了算法的收敛速度,特别是在早期搜索阶段。因此,本发明的方法为工程优化问题中群体智能算法难以在搜索后期阶段,即狭窄的局部搜索区域内难以找到最优解决方案的缺点,提供了一种新的方法。
附图说明
[0026]
附图用来提供对本发明的进一步理解,与说明描述一起用于解释本发明的实施例,并不构成对本发明的限制。在附图中:
[0027]
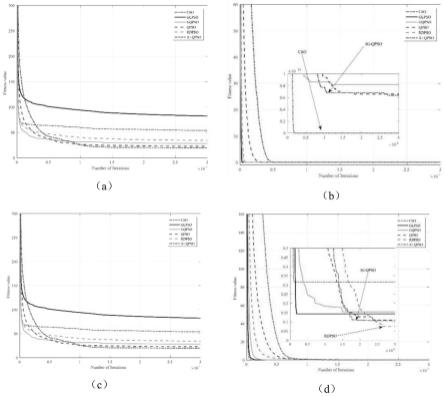
图1示出了本发明的基于高斯分布qpso算法和其他pso变体在两个单模型和两个多模型函数上的收敛行为的示意图。
[0028]
图2示出了本发明一实施例中的焊接梁组设计问题。
[0029]
图3示出了本发明的基于高斯分布qpso算法的收敛行为及焊接梁设计问题的比较算法的收敛行为曲线。
[0030]
图4示出了本发明一实施例中的压力容器设计问题。
[0031]
图5示出了本发明的基于高斯分布qpso算法的收敛行为及压力容器问题的比较算法的收敛行为曲线。
[0032]
图6示出了本发明一实施例中的减速器设计优化问题。
[0033]
图7示出了本发明的基于高斯分布qpso算法的收敛行为及压力容器问题的比较算法的收敛行为曲线。
[0034]
图8示出了本发明一实施例中的齿轮设计问题。
[0035]
图9示出了本发明的基于高斯分布qpso算法的收敛行为及齿轮设计问题的比较算法的收敛行为曲线。
[0036]
图10示出了本发明一实施例中的多盘制动器设计问题。
[0037]
图11示出了本发明的基于高斯分布qpso算法的收敛行为及多盘制动器设计问题的比较算法的收敛行为曲线。
[0038]
图12示出了本发明一实施例中的张力线设计问题。
[0039]
图13示出了本发明的基于高斯分布qpso算法的收敛行为及张力线设计问题的比较算法的收敛行为曲线。
具体实施方式
[0040]
为了进一步理解本发明,下面结合实施例对本发明优选实施方案进行描述,但是应当理解,这些描述只是为进一步说明本发明的特征和优点,而不是对本发明权利要求的
限制。
[0041]
该部分的描述只针对典型的实施例,本发明并不仅局限于实施例描述的范围。不同实施例的组合、不同实施例中的一些技术特征进行相互替换,相同或相近的现有技术手段与实施例中的一些技术特征进行相互替换也在本发明描述和保护的范围内。
[0042]
1.基准数据集及参数设置
[0043]
为了评估所提出算法的性能,我们首先测试了ig-qpso和其他比较算法,包括pso,cso,apso,glpso,gqpso,iapso,lipso,qpso,rdpso以及srpso,在10个cec的2013基准函数上。然后,对eops的一些实例进行了igqpso等测试算法的测试,包括焊接梁设计、压力容器设计、减速器设计、齿轮传动系设计、多盘离合器制动设计和张力线设计问题。
[0044]
为了公平比较,比较算法的参数是根据文献的建议设定的。至于ig-qpso,对于cec 2013基准函数和eop的实验,方差σ设置为从5降低到0.01。此外,cec 2013基准函数的实验在matlab 2018a中实现,eop实验在python 2.7环境中实现。在实验中使用的计算机cpu配置为1.8ghz intel core i5,ram为4g 1600mhz ddr3。
[0045]
2.工程优化问题数学描述
[0046]
由于工程优化问题(eop)通常在数学上表示为约束优化问题(cop),首先简要概述非线性cop,然后在本节中描述约束处理方法。
[0047]
2.1cops的一般规定
[0048]
通常,cop可以描述为:
[0049][0050]
其中j=1,2,
…
,j,k=j 1,j 2,
…
,nc,i=1,2,
…
,d,且nc是cop的约束数量。x=(x1,x2,
…
,xd)表示一个候选解决方案。gj(x)和hk(x)是第j个不等式约束和第k个等式约束。通常,等式约束hk(x)可以转换为两个不等式约束,可被描述为|hk(x)|≤∈,其中∈是一个阈值在[10-5
,10-3
]的变量。解决cop的目标是在可行区域中搜索同时满足所有约束条件的全局最优解。
[0051]
2.2约束处理
[0052]
使用群体智能算法(如粒子群优化算法)解决cop的困难在于如何有效地处理约束。惩罚函数方法通常是处理此类问题最常用的方法。传统的惩罚函数方法一般分为内部惩罚函数法和外部惩罚函数法。内部惩罚函数方法也称为障碍物惩罚函数方法,它在整个搜索过程中搜索可行区域内的最优解。外部惩罚函数方法从不可行的解决方案开始,逐渐接近可行的空间。由于外部惩罚方法不需要提供初始可行的解决方案,因此计算成本低于内部惩罚函数方法,因此我们使用这种方法来解决cops,如下所述。
[0053][0054]
其中r是控制惩罚的正合理数,q是候选解决方案违反的约束数。f(x)是目标函数,如果x满足所有约束,则v等于f(x)。否则,v的值等于f(x)和惩罚值的总和。
[0055]
2.3pso算法
[0056]
在规范的pso中,每个粒子的速度和位置由其自身的个人最佳位置和整个群体发现的全局最佳位置决定。令和分别表示粒子i(i=1,2,
…
,m,其中m代表种群大小)在第t次迭代中的速度和位置,其中d是优化问题的决策数。因此,粒子i在迭代t 1时的速度和当前位置由下式给出:
[0057][0058]
其中c1和c2是加速系数,通常都设置为2。和是在(0,1)上均匀分布的两个不同的随机数序列。在每次迭代中,每个粒子都从自己的个人最佳解pi和全局最佳解g中学习。
[0059]
2.4qpso算法
[0060]
qpso算法受到量子力学理论和规范pso轨迹分析的启发。这是一种概率算法,粒子位置的更新方程与经典pso非常不同。在qpso中,每个粒子的更新方程是:
[0061][0062]
其中
[0063][0064]
其中表示粒子i在第(t 1)次迭代中的位置的第j个分量。是第t次迭代中粒子i的局部吸引子的第j个分量。α是收缩膨胀(ce)系数,是用于在搜索过程中控制qpso中粒子收敛速度的正实数。具体而言,较小的ce系数意味着粒子更快的收敛。是qpso中所有粒子的个人最佳位置的平均值。和是均匀分布在(0,1)上的两个不同的随机数序列。
[0065]
3.cec 2013基准功能的结果
[0066]
为了验证ig-qpso的性能,所有结果都是通过独立进行50次算法运行获得的。在cec2013基准函数的实验中,群体大小m和最大迭代次数t分别设置为30和300000。应该注意的是,f1到f5是单峰函数,f6到f10是多峰函数,在我们的实验中,所有函数的维数都是30。
[0067]
表1显示了所提出的ig-qpso和其他十个测试竞争对手在十个cec 2013基准函数上获得的最终最佳适应度值的平均值和标准偏差。它还显示了每个基准函数上所有算法的排名以及每个算法的平均排名。可以清楚地看出,ig-qpso在所有测试算法中表现最佳,从算法的最低平均秩值可以看出。cso在大多数基准功能上表现良好,特别是在单峰功能上。但是,该算法的性能不是很稳定,从不同测试功能的排名可以看出。ig-qpso与其他竞争对手之间的wilcoxon检验结果如表2所示,表明ig-qpso与其他竞争对手的最佳适应值平均值之间存在显着差异,除了函数f1和f8。
[0068]
图1显示了ig-qpso和其他五个竞争对手(包括cso,rdpso,qpso,glqpso和gqpso)的收敛行为,它们在所有比较算法中具有更好的最终最佳适应度值平均值。如图1所示,在早期搜索阶段,ig-qpso的收敛速度低于所有其他算法,然后最终找到令人满意的解决方案。此外,根据图1(a)和图1(b),cso在早期搜索阶段收敛非常快,因此它可以在单峰测试函数(如函数f2和f5)上找到一个很有前途的解决方案。然而,从图1(c)和图1(d)可以看出,cso方法陷入局部最优区域,在求解多模态函数时最终找到一个不令人满意的解。
[0069]
表1 ig-qpso和其他竞争对手对cec 2013基准功能的适应性值
[0070][0071][0072]
表2 ig-qpso与其他算法之间的wilcoxon检验结果
[0073][0074]
4.对比实验分eop的结果
[0075]
表3显示了不同eop的参数设置,包括问题d的维数,约束数nc,群大小m,最大迭代次数t和正有理数r。对于公平比较,m,t和r分别设置为30,30000和7000。对于所有eop,ig-qpso中的参数σ从5线性减小到0.01。应该指出的是,r没有设置在齿轮设计问题中,因为它没有限制。
[0076]
表3参数设定
[0077][0078]
4.1焊接梁组设计问题
[0079]
这个问题的目标是设计一个成本最低的焊接梁,受到一些限制。图2显示了由梁a和将其固定在构件b上所需的焊缝组成的焊接梁的结构。目的是找到具有四个设计变量(即x1,x2,x3,x4)和四个约束(即剪切应力τ,梁σ中的弯曲应力,棒pc上的屈曲载荷和梁δ上的末端偏转)的最小制造成本。
[0080]
表4焊接梁设计问题不同算法得到的最佳解的比较
[0081][0082]
表4显示了ig-qpso算法的最佳解决方案与竞争对手在设计变量,适应度值和约束值方面的比较。从该表中我们可以看出,只有三种算法,即pso,gqpso和所提出的ig-qpso算法,找到了满足所有约束的最佳已知解决方案。此外,apso在这个问题上表现最差,rdpso和srpso获得的最佳解决方案违反了一些约束条件,因此无法与其他最佳解决方案进行比较。
[0083]
表5焊接梁设计问题不同算法给出的统计结果比较
[0084][0085]
测试算法的统计结果在表5中给出。根据该表,通过igqpso算法的50次运行获得的最终适应度值的平均值是1.6699,这是通过其他测试算法获得的所有结果中的最低值。此外,ig-qpso是最稳定的算法,因为ig-qpso算法的50次运行中获得的最终适应度值的标准偏差(sd)优于其他算法的效果。因此,我们可以得出结论,ig-qpso算法在焊接梁设计问题上的所有测试算法中表现最佳。图3显示了ig-qpso和其他四种算法(包括gqpso,pso,qpso和srpso)的收敛行为,因为它们产生的50次运行中获得的最终最佳适应度值的平均值小于其他测试算法,如我们可以在表5中看到。很明显,在搜索过程的早期阶段,ig-qpso的收敛速度比gqpso慢,最终找到最佳解决方案。相比之下,cso最初收敛非常快,但很快陷入当地
的最佳区域。以上分析表明,ig-qpso早期具有较强的全局搜索能力,并逐渐增强其局部搜索能力,帮助其找到更令人满意的最终解决方案。
[0086]
4.2压力容器设计问题
[0087]
压力容器设计问题的目标是最小化材料成本,制造成本和焊接成本的总和,如图4所示。该问题的目标函数由四个决策变量确定,即压力容器ts的厚度,头部th的厚度,容器r的半径以及没有头部l的容器的长度。
[0088]
表6不同算法对压力容器问题得到的最佳解的比较
[0089][0090][0091]
应用ig-qpso算法解决该问题,并将获得的解决方案与其他测试算法产生的最佳解决方案进行比较,如表6所示。从该表中可以看出,ig-qpso算法50次以上的最佳适应度值为6230.7303,是所有测试算法中最低的,相应的最佳解决方案满足所有约束优化条件。
[0092]
表7不同算法给出的压力容器问题统计结果的比较
[0093][0094]
每种算法的统计结果如表7所示。ig-qpso算法的50次独立运行产生的平均值是6230.7303,这是测试算法产生的所有结果中最好的一个。同时,该算法的50次运行中最终适应度值的sd是所有测试算法中第二好的。这些结果证实ig-qpso具有比竞争对手更好的算法性能和稳健性。此外,如统计结果所示,pso的性能次之,发现相对较好的结果,标准偏差最低。ig-qpso,cso,qpso,gqpso和srpso的收敛行为如图5所示。同样,在早期搜索阶段,igqpso收敛速度慢于pso,qpso和gqpso,但之后加速收敛,最终找到最佳解决方案。此外,gqpso中的粒子聚合到局部最优区域的速度非常快,因为算法只需要30次迭代就能找到一
个相对满意的解。
[0095]
4.3减速器设计优化问题
[0096]
减速器问题的目的,如图6所示,是在齿轮弯曲应力,表面应力,轴的横向偏转和轴中应力的限制下使其总重量最小化。设计变量x1,x2,
…
,x7分别是面宽,齿模块,小齿轮中的齿数,轴承之间的第一轴的长度,轴承之间的第二轴的长度以及第一和第二轴的直径。第三个变量是整数,其余的决策变量是连续实数。
[0097]
表8不同算法对减速器设计问题的最佳解决方案比较
[0098][0099]
表9减速器设计问题的不同算法给出的统计结果比较
[0100][0101]
表8列出了我们提出的ig-qpso和比较算法发现的最佳解决方案的比较。根据该表,我们发现pso,qpso,gqpso和ig-qpso获得了最着名的解决方案,其优于通过其他测试算法获得的解决方案。此外,ig-qpso 50次运行的最终适应度值的平均值和sd均小于其他比较方法的平均值和sd,如表9所示。ig-qpso和其他算法在齿轮设计问题上的收敛行为如图7
所示。类似于上述两个eop的性能,cso在开始时收敛非常快,因为粒子在大约25次迭代时聚集到局部最佳区域。总之,ig-qpso算法在找到最知名解决方案的所有算法中具有更好的收敛性。
[0102]
4.4齿轮设计问题
[0103]
齿轮设计问题的目标是最小化齿轮比的成本,如图8所示。问题的决策变量是齿轮a,b,d和f的牙齿数量,如a.4所示,它们在数学公式中由x1,x2,
…
,x5表示。约束条件只是设计变量的范围限制。请注意,这是一个离散优化问题,因为要优化的设计变量都是整数,这可能使实际编码的pso算法更难以执行优化任务。
[0104]
表10不同算法得到的齿轮设计问题最佳解的比较
[0105][0106]
表11不同算法给出的齿轮设计问题统计结果比较
[0107][0108]
对于这个问题,表10中提供了ig-qpso和其他比较算法找到的最佳解决方案及其相应适应度值之间的比较。可以观察到ig-qpso算法收敛到最着名的解决方案,这与gqpso和qpso算法发现的解决方案相同。如表11中的统计结果所示,ig-qpso是所有测试算法中第三好的算法。就最终最佳适应度值和稳定性(即sd)而言,qpso和gqpso算法优于其他测试的优化算法。ig-qpso的收敛行为如图9所示,从中我们可以看出该算法未能收敛到令人满意的解。但是,我们发现在搜索过程的最后阶段,最佳适应度值仍然呈下降趋势。
[0109]
4.5多盘离合器制动器设计问题
[0110]
这个问题旨在通过最小化制动系统的质量来设计多离合器制动器,如图10所示。有五个离散的决策变量:x=(ri,r0,t,f,z)=(x1,x2,x3,x4,x5),其中ri={60,61,
…
,80}是以毫米为单位的内半径,r0={90,91,
…
,110}是以毫米为单位的外半径,f={600,610,
…
,1000}是z中的驱动力,z={2,3,
…
,9}是摩擦表面的数量也称为圆盘。
[0111]
表12和表13分别列出了所有测试算法的最佳解决方案和统计结果的比较。从表12
中可以看出,ig-qpso算法再次找到了cso,glpso,pso,qpso,rdpso和srpso算法也发现的最佳解决方案。然而,qpso和ig-qpso在每次运行中找到了最佳解决方案,对于通过这两种算法获得的超过50次运行的最终最佳适应度值的sd为零,如表13所示。图11表明ig-qpso比比较算法具有更平滑的收敛性。因此,我们可以得出结论,ig-qpso在开发和勘探之间有很好的平衡。
[0112]
表12通过不同算法获得的关于多盘离合器制动设计问题的最佳解决方案的比较
[0113][0114]
表13不同算法对多盘离合器制动设计问题的统计结果比较
[0115][0116]
4.6张力线设计问题
[0117]
张力线设计问题的目标是最小化线的重量(如图12所示)。x1,x2,x3分别表示张力线的直径,张力线的宽度和张力线的数量。表14列出了所提出的ig-qpso获得的最佳解决方案以及用于性能比较的比较算法。根据该表,ig-qpso和许多竞争对手在不违反任何约束的情况下找到了最着名的解决方案。如表15所示,显然ig-qpso的50次运行中的平均值和最佳最终适应度值均为0.0110,并且所提出的ig-qpso获得令人满意的sd。同样,图13显示ig-qpso在所有比较算法中找到了最佳解决方案。
[0118]
表14由张力串设计问题的不同算法给出的统计结果的比较
[0119][0120]
表15通过不同算法获得的关于张力串设计问题的最佳解决方案的比较
[0121][0122]
5相关公式
[0123]
5.1焊接梁列车设计
[0124]
目标函数和约束公式如下:
[0125]
最小化
[0126][0127]
从属于:
[0128][0129][0130]
其中
[0131][0132]
δ
max
=0.25in。
[0133]
5.2压力容器设计
[0134]
压力容器设计问题y=[ts,th,r,s]=[x1,x2,x3,x4]的优化问题可描述为:
[0135]
最小化
[0136][0137]
从属于:
[0138][0139]
这四个决策变量的范围是:
[0140][0141]
5.3减速器设计优化
[0142]
目标函数可被定义为:
[0143][0144]
从属于:
[0145][0146][0147]
其中2.6≤x1≤3.6,0.7≤x2≤0.8,17≤x3≤28,7.3≤x4≤8.3,7.3≤x5≤8.3,2.9≤x6≤3.9,5.0≤x7≤5.5
[0148]
5.4齿轮设计
[0149]
齿轮设计问题的数学公式如下所述。
[0150]
最小化
[0151][0152]
从属于:
[0153][0154]
其中所有x
′i都是整数。
[0155]
5.5多盘离合器制动设计
[0156]
多盘离合器制动设计问题的目标函数和约束描述如下。
[0157]
最小化
[0158][0159]
从属于:
[0160][0161]
其中其中
[0162]
5.6张力线设计
[0163]
目标函数及其相应的约束是:
[0164][0165]
从属于
[0166][0167]
其中
[0168][0169]
这里本发明的描述和应用是说明性的,并非想将本发明的范围限制在上述实施例中。说明书中所涉及的效果或优点等相关描述可因具体条件参数的不确定或其它因素影响而可能在实际实验例中不能体现,效果或优点等相关描述不用于对发明范围进行限制。这里所披露的实施例的变形和改变是可能的,对于那些本领域的普通技术人员来说实施例的替换和等效的各种部件是公知的。本领域技术人员应该清楚的是,在不脱离本发明的精神或本质特征的情况下,本发明可以以其它形式、结构、布置、比例,以及用其它组件、材料和部件来实现。在不脱离本发明范围和精神的情况下,可以对这里所披露的实施例进行其它变形和改变。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。