1.本发明属于摄影测量与遥感技术领域,具体涉及一种遥感影像连接点匹配方法及计算机可读介质。
背景技术:
2.影像匹配是指通过一定的匹配算法在两幅或多幅影像之间识别同名点的过程。作为图像融合、目标变化检测等问题的前期步骤,影像匹配已经广泛应用在遥感、数字摄影测量、地图学及军事应用等多个领域。然而,不同于普通视觉图像,遥感影像具有幅宽广、数据量大的特点,常规影像匹配算法难以有效应用于遥感影像匹配,需进一步对匹配算法优化与改进。现有遥感影像匹配算法无标准流程,需从业者同时兼备图像处理与摄影测量知识,限制了常规影像匹配算法在遥感影像匹配中的进一步应用。因此迫切需要一种遥感影像连接点匹配框架,该框架可充分顾及遥感影像的特点,对其进行特定处理,使得常规影像匹配算法能直接应用于遥感影像匹配。
技术实现要素:
3.本发明针对现有遥感影像匹配算法无统一框架的不足,为降低遥感影像匹配难度,设计一种遥感影像连接点匹配框架。该框架通过基于物方地理约束对影像进行格网划分,并通过子块局部纠正消除地形影响,随后对子块匹配出的点位通过定位模型换算为整幅影像上像素点坐标,将子块对应的整幅影像像方坐标进行合并从而完成整幅影像连接点生成。该框架结合分块并行思路,可提高效率,有效降低遥感影像连接点匹配的门槛。
4.为了达到上述目的,本发明提供的技术方案是一种遥感影像连接点匹配方法,包括以下步骤:
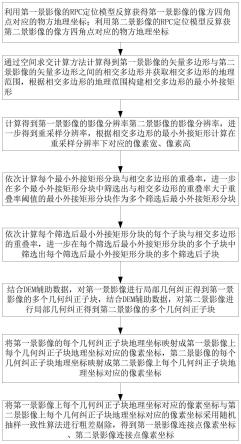
5.步骤1:获取第一景影像及对应的rpc定位模型,获取第一景影像的像素宽、像素高以构建第一景影像的像方四角点,利用第一景影像的rpc定位模型反算获得第一景影像的像方四角点对应的物方地理坐标;获取第二景影像及对应的rpc定位模型,获取第二景影像的像素宽、像素高以构建第二景影像的像方四角点,利用第二景影像的rpc定位模型反算获第二景影像的像方四角点对应的物方地理坐标;
6.步骤2,采用第一景影像的像方四角点对应的物方地理坐标构建第一景影像的矢量多边形,采用第二景影像的像方四角点对应的物方地理坐标构建第二景影像的矢量多边形,通过空间求交计算方法计算得到第一景影像的矢量多边形与第二景影像的矢量多边形之间的相交多边形并获取相交多边形的地理范围,根据相交多边形的地理范围构建相交多边形的最小外接矩形。
7.步骤3:将dem辅助数据结合第一景影像的rpc定位模型计算得到第一景影像的影像分辨率,将dem辅助数据结合第二景影像的rpc定位模型计算得到第二景影像的影像分辨率,进一步得到重采样分辨率,根据相交多边形的最小外接矩形计算在重采样分辨率下对应的像素宽、像素高;
8.步骤4:对相交多边形的最小外接矩形进行格网划分得到多个最小外接矩形分块,依次计算每个最小外接矩形分块与相交多边形的重叠率,进一步在多个最小外接矩形分块中筛选出与相交多边形的重叠率大于重叠率阈值的最小外接矩形分块作为多个筛选后最小外接矩形分块;
9.步骤5:对多个筛选后最小外接矩形分块依次进行格网划分,得到每个筛选后最小外接矩形分块的多个子块,依次计算每个筛选后最小外接矩形分块的每个子块与相交多边形的重叠率,进一步在每个筛选后最小外接矩形分块的多个子块中筛选出与相交多边形的重叠率大于精细重叠率阈值的每个筛选后最小外接矩形分块的子块作为每个筛选后最小外接矩形分块的多个筛选后子块;
10.步骤6:根据每个筛选后最小外接矩形分块的每个筛选后矩形子块,结合dem辅助数据,对第一景影像进行局部几何纠正得到第一景影像的多个几何纠正子块,根据每个筛选后最小外接矩形分块的每个筛选后子块的四角经纬度,结合dem辅助数据,对第二景影像进行局部几何纠正得到第二景影像的多个几何纠正子块;
11.步骤7:将每个第一景影像几何纠正子块作为参考影像、第二景影像几何纠正子块作为配准影像,采用匹配算法获取多组同名点对位于第一景影像几何纠正子块地理坐标与第二景影像几何纠正子块地理坐标;将第一景影像的每个几何纠正子块地理坐标映射成第一景影像上每个几何纠正子块地理坐标对应的像素坐标,第二景影像的每个几何纠正子块地理坐标映射成第二景影像上每个几何纠正子块地理坐标对应的像素坐标;
12.步骤8:将第一景影像上每个几何纠正子块地理坐标对应的像素坐标与第二景影像上每个几何纠正子块地理坐标对应的像素坐标采用随机抽样一致性算法进行粗差剔除,得到第一景影像连接点像素坐标、第二景影像连接点像素坐标;
13.作为优选,步骤2所述获取相交多边形的地理范围,具体如下:
14.依次获取相交多边形中每个点的经度、每个点的纬度;
15.在相交多边形中多个点的经度中筛选出相交多边形中每个点的经度最小值、相交多边形中每个点的经度最大值构建相交多边形的经度范围,定义如下:
16.[long_min,long_max]
[0017]
其中,long_min表示相交多边形中每个点的经度最小值,long_max表示相交多边形中每个点的经度最大值;
[0018]
在相交多边形中多个点的纬度中筛选出相交多边形中每个点的纬度最小值、相交多边形中每个点的维度最大值,作为相交多边形的纬度范围,定义如下:
[0019]
[lat_min,lat_max]
[0020]
其中,lat_min表示相交多边形中每个点的纬度最小值,lat_max表示相交多边形中每个点的纬度最大值;
[0021]
通过相交多边形的经度范围、相交多边形的纬度范围构建相交多边形的地理范围;
[0022]
步骤2所述相交多边形的地理范围构建相交多边形的最小外接矩形,具体如下:
[0023]
将(long_min、lat_min)、(long_min、lat_max)、(long_max、lat_max)、(long_min、lat_max)作为相交多边形的最小外接矩形的四个顶点以构建相交多边形的最小外接矩形;
[0024]
作为优选,步骤3所述结合第一景影像的rpc定位模型计算得到第一景影像的影像
分辨率,具体过程如下:
[0025]
所述第一景影像定义为:imga;
[0026]
获取第一景影像imga像素宽,定义为:imga_w;
[0027]
获取第一景影像imga像素高,定义为:imga_h;
[0028]
获取第一景影像第一像素点的像素坐标,定义为:
[0029][0030]
其中,n表示像素步长,表示第一景影像第一像素点的列坐标,表示第一景影像第一像素点的行坐标,p
1,1
表示第一景影像第一像素点;
[0031]
结合dem辅助数据与第一景影像的rpc定位模型,采用光线追踪法计算第一景影像第一像素点的像素坐标对应的三维地理坐标,定义为:
[0032]
(u
1,1
,v
1,1
,w
1,1
)
[0033]
其中,u
1,1
表示表第一景影像第一像素点三维地理坐标的经度,v1,1表示第一景影像第一像素点三维地理坐标的纬度,w
1,1
表示第一景影像第一像素点三维地理坐标的高程;
[0034]
获取第一景影像第二像素点的像素坐标,定义为:
[0035][0036]
其中,n表示像素步长,表示第一景影像第二像素点的列坐标,表示第一景影像第二像素点的列坐标,p
1,2
表示第二景影像第二像素点;
[0037]
结合dem辅助数据与第一景影像rpc定位模型,采用光线追踪法计算第一景影像第二像素点的像素坐标对应的三维地理坐标定义为:
[0038]
(u
1,2
,v
1,2
,w
1,2
)
[0039]
其中,u
1,2
表示表第一景影像第二像素点三维地理坐标的经度,v
1,2
表示第一景影像第二像素点三维地理坐标的纬度,w
1,2
表示第二景影像第一像素点三维地理坐标的高程;
[0040]
计算第一景影像分辨率,具体如下:
[0041][0042]
其中,irs1为第一景影像分辨率,n表示像素步长;
[0043]
步骤3所述结合第二景影像的rpc定位模型计算得到第二景影像的影像分辨率,具体过程如下:
[0044]
所述第二景影像定义为:imgb;
[0045]
获取第二景影像imgb像素宽,定义为:imgb_w;
[0046]
获取第二景影像imgb像素高,定义为:imgb_h;
[0047]
获取第二景影像第一像素点的像素坐标,定义为:
[0048][0049]
其中,n表示像素步长,表示第二景影像第一像素点的列坐标,
表示第二景影像第一像素点的行坐标,p
2,1
表示第二景影像第一像素点;
[0050]
结合dem辅助数据与第二景影像的rpc定位模型,采用光线追踪法计算第二景影像第一像素点的像素坐标对应的三维地理坐标,定义为:
[0051]
(u
2,1
,v
2,1
,w
2,1
)
[0052]
其中,u
2,1
表示表第二景影像第一像素点三维地理坐标的经度,v
2,1
表示第二景影像第一像素点三维地理坐标的纬度,w
2,1
表示第二景影像第一像素点三维地理坐标的高程;
[0053]
获取第二景影像第二像素点的像素坐标,定义为:
[0054][0055]
其中,n表示像素步长,表示第二景影像第二像素点的列坐标,表示第二景影像第二像素点的列坐标,p
2,2
表示第二景影像第二像素点;
[0056]
结合dem辅助数据与第二景影像rpc定位模型,采用光线追踪法计算第二景影像第二像素点的像素坐标对应的三维地理坐标定义为:
[0057]
(u
2,2
,v
2,2
,w
2,2
)
[0058]
其中,u
2,2
表示表第二景影像第二像素点三维地理坐标的经度,v
2,2
表示第二景影像第二像素点三维地理坐标的纬度,w
2,2
表示第二景影像第二像素点三维地理坐标的高程;
[0059]
计算第二景影像分辨率,具体如下:
[0060][0061]
其中,irs2为第二景影像分辨率,n表示像素步长;
[0062]
步骤3所述进一步得到重采样分辨率,具体过程如下:
[0063]
将第一景影像分辨率、第二景影像分辨率之间较大值作为重采样分辨率,所述重采样分辨率定义为:irs
final
;
[0064]
步骤3所述根据相交多边形的最小外接矩形计算在重采样分辨率下对应的像素宽m_w、像素高m_h,公式如下:
[0065][0066]
其中,m_w表示相交多边形的最小外接矩形计算在重采样分辨率下对应的像素宽,m_h相交多边形的最小外接矩形计算在重采样分辨率下对应的表示像素高,irs
final
表示重采样分辨率,long_min表示相交多边形中每个点的经度最小值,long_max表示相交多边形中每个点的经度最大值,lat_min表示相交多边形中每个点的纬度最小值,lat_max表示相交多边形中每个点的纬度最大值;
[0067]
作为优选,步骤4所述对相交多边形的最小外接矩形进行格网划分得到多个最小外接矩形分块,具体过程如下:
[0068]
设定列方向分格网划分个数为nblk_x,设定行方向分格网划分个数为nblk_y;
[0069]
计算每个最小外接矩形分块的像素宽、每个最小外接矩形分块的像素高,具体如
下:
[0070][0071]
其中,blockx为每个最小外接矩形分块的像素宽度,blocky为每个最小外接矩形分块的像素高度,nblk_x为列方向分格网划分个数,nblk_y为设定行方向分格网划分个数,m_w表示相交多边形的最小外接矩形计算在重采样分辨率下对应的像素宽,m_h相交多边形的最小外接矩形计算在重采样分辨率下对应的表示像素高;
[0072]
第j行第i列的最小外接矩形分块,定义为:
[0073]
blk
i,j
[0074]
i∈[1,nblk_x],j∈[1,nblk_y]
[0075]
其中,i表示列方向的分块序号,j表示行方向的分块序号,nblk_x为列方向分格网划分个数,nblk_y为设定行方向分格网划分个数;
[0076]
计算第j行第i列的最小外接矩形分块的左上角像素坐标,具体如下:
[0077][0078][0079][0080]
其中,blockx为每个最小外接矩形分块的像素宽度,blocky为每个最小外接矩形分块的像素高度,表示第j行第i列的最小外接矩形分块的左上角像素坐标,表示第j行第i列的最小外接矩形分块的左上角像素坐标的行坐标,表示第j行第i列的最小外接矩形分块的左上角像素坐标的列坐标;
[0081]
计算第j行第i列的最小外接矩形分块的右下角像素坐标,具体如下:
[0082][0083][0084][0085]
其中,表示第j行第i列的最小外接矩形分块的右下角像素坐标,表示第j行第i列的最小外接矩形分块的右下角像素坐标的行坐标,表示第j行第i列的最小外接矩形分块的右下角像素坐标的列坐标;
[0086]
依次计算第j行第i列的最小外接矩形分块的最小外接矩形的经度最小值、经度最大值、纬度最小值、纬度最大值,具体如下:
[0087][0088]
其中,表示第j行第i列的最小外接矩形分块的经度最小值,表示第j行第i列的最小外接矩形分块的经度最大值,表示第j行第i列的最小外
接矩形分块的纬度最小值,表示第j行第i列的最小外接矩形分块的纬度最大值,long_min表示相交多边形中每个点的经度最小值,long_max表示相交多边形中每个点的经度最大值,lat_min表示相交多边形中每个点的纬度最小值,lat_max表示相交多边形中每个点的纬度最大值;
[0089]
将将作为四个顶点以构建第j行第i列的最小外接矩形分块对应的地理矩形分块;
[0090]
步骤4所述依次计算每个最小外接矩形分块与相交多边形的重叠率,具体如下:
[0091]
第j行第i列的最小外接矩形分块的重叠率,计算方式如下:
[0092][0093]
i∈[1,nblk_x],j∈[1,nblk_y]
[0094]
其中,i表示列方向的分块序号,j表示行方向的分块序号,nblk_x为列方向分格网划分个数,nblk_y为设定行方向分格网划分个数,表示第j行第i列的最小外接矩形分块的重叠率,intersect(*)表示空间求交操作,area(*)表示计算多边形面积,blk
i,j
代表第j行第i列的最小外接矩形分块,roigeopoly代表相交多边形;
[0095]
若则
[0096]
若则
[0097]
其中,α表示重叠率阈值,表示第j行第i列的最小外接矩形分块的属性;
[0098]
步骤4所述多个筛选后最小外接矩形分块获取方式如下:
[0099]
在多个最小外接矩形分块中筛选出的最小外接矩形分块,得到多个筛选后最小外接矩形分块,具体定义如下:
[0100][0101]
g∈[1,k],ig∈[1,nblk_x],jg∈[1,nblk_y]
[0102]
其中,i表示列方向的分块序号,j表示行方向的分块序号,nblk_x为列方向分格网划分个数,nblk_y为设定行方向分格网划分个数,表示第g个筛选后最小外接矩形分块,即第ig行第jg列的最小外接矩形分块,k表示筛选后最小外接矩形分块的数量;
[0103]
作为优选,步骤5所述对多个筛选后最小外接矩形分块依次进行格网划分,得到每个筛选后最小外接矩形分块的多个子块,具体如下:
[0104]
设定分块列方向分格网划分个数为ncel_x,设定分块行方向分格网划分个数ncel_y;
[0105]
计算每个筛选后最小外接矩形分块的子块的像素宽、每个筛选后最小外接矩形分块的子块的像素高,具体如下:
[0106][0107]
其中,cellx为每个筛选后最小外接矩形分块的子块的像素宽度、celly每个筛选
后最小外接矩形分块的子块的像素高度;ncel_x为分块列方向分格网划分个数,ncel_y为分块行方向分格网划分个数,blockx为每个最小外接矩形分块的像素宽度,blocky为每个最小外接矩形分块的像素高度;
[0108]
在第g个筛选后最小外接矩形分块中第q行第p列的子块,定义为:
[0109][0110]
g∈[1,k],q∈[1,ncel_x],p∈[1,ncel_y]
[0111]
其中,g表示筛选后最小外接矩形分块的子块,k表示筛选后最小外接矩形分块的数量,q表示列方向的子块序号,p表示行方向的子块序号,ncel_x为分块列方向分格网划分个数,ncel_y为分块行方向分格网划分个数。
[0112]
计算第g个筛选后最小外接矩形分块中第q行第p列的子块的左上角像素坐标,具体如下:
[0113][0114][0115][0116]
其中,cellx为每个筛选后最小外接矩形分块的子块的像素宽度、celly每个筛选后最小外接矩形分块的子块的像素高度,表示第g个筛选后最小外接矩形分块中第q行第p列的子块的左上角像素坐标,表示第g个筛选后最小外接矩形分块中第q行第p列的子块的左上角像素坐标的行坐标,表示第g个筛选后最小外接矩形分块中第q行第p列的子块的左上角像素坐标的列坐标。表示第g个筛选后最小外接矩形分块,且位于第j行第i列的左上角像素坐标的行坐标,表示第g个筛选后最小外接矩形分块,且位于第j行第i列的左上角像素坐标的列坐标。
[0117]
计算第g个筛选后最小外接矩形分块中第q行第p列的子块的右下角像素坐标,具体如下:
[0118][0119][0120][0121]
其中,cellx为每个筛选后最小外接矩形分块的子块的像素宽度、celly每个筛选后最小外接矩形分块的子块的像素高度,表示第g个筛选后最小外接矩形分块中第q行第p列的子块的右下角像素坐标,表示第g个筛选后最小外接矩形分块中第q行第p列的子块的右下角像素坐标的行坐标,表示第g个筛选后最小外接矩形分块中第q行第p列的子块的右下角像素坐标的列坐标。表示第g个筛选后最小外接矩形分块,且位于第j行第i列的左上角像素坐标的行坐标,表示第g个筛选后最小外接矩形分块,且位于第j行第i列的左上角像素坐标的列坐标;
[0122]
依次计算第g个筛选后最小外接矩形分块中第q行第p列的子块的经度最小值、经度最大值、纬度最小值、纬度最大值,具体如下:
[0123][0124]
其中,表示第g个筛选后最小外接矩形分块中第q行第p列的子块经度最小值,表示第g个筛选后最小外接矩形分块中第q行第p列的子块的经度最大值,表示第g个筛选后最小外接矩形分块中第q行第p列的子块的纬度最小值,表示第g个筛选后最小外接矩形分块中第q行第p列的子块的纬度最大值,long_min表示相交多边形中每个点的经度最小值,long_max表示相交多边形中每个点的经度最大值,lat_min表示相交多边形中每个点的纬度最小值,lat_max表示相交多边形中每个点的纬度最大值;
[0125]
将将作为四个顶点以构建第g个筛选后最小外接矩形分块中第q行第p列的子块对应的地理矩形分块;
[0126]
步骤5所述计算每个筛选后最小外接矩形分块的每个子块与相交多边形的重叠率,具体如下:
[0127][0128]
g∈[1,k],q∈[1,ncel_x],p∈[1,ncel_y]
[0129]
其中,g表示筛选后最小外接矩形分块的子块,k表示筛选后最小外接矩形分块的数量,q表示列方向的子块序号,p表示行方向的子块序号,ncel_x为分块列方向分格网划分个数,ncel_y为分块行方向分格网划分个数。表示第g个筛选后最小外接矩形分块中第q行第p列的子块的重叠率,intersect(*)表示空间求交操作,area(*)表示计算多边形面积,代表第g个筛选后最小外接矩形分块中第q行第p列的子块,roigeopoly代表相交多边形;
[0130]
若则
[0131]
若则
[0132]
其中,β表示重叠率阈值,表示第g个筛选后最小外接矩形分块中第q行第p列的子块的属性;
[0133]
步骤5所述筛选后最小外接矩形分块的多个筛选后子块获取方式如下:
[0134]
在筛选后最小外接矩形分块的多个筛选后子块中筛选出的子块块,得到筛选后最小外接矩形分块的多个筛选后子块,具体定义如下:
[0135][0136]
g∈[1,k],h∈[1,o],qh∈[1,ncel_x],ph∈[1,ncel_y]
[0137]
其中,g表示筛选后最小外接矩形分块的子块,k表示筛选后最小外接矩形分块的数量,qh表示列方向的子块序号,ph表示行方向的子块序号,ncel_x为分块列方向分格网划分个数,ncel_y为分块行方向分格网划分个数,表示第g个筛选后最小外接矩形分块中筛选的第h个子块,即第g个筛选后最小外接矩形分块中筛选的第ph行第qh列的子块,o表示第g个筛选后最小外接矩形分块中筛选的子块的数量。
[0138]
作为优选,步骤6所述对第一景影像进行局部几何纠正得到第一景影像的多个几何纠正子块,具体如下:
[0139]
根据第g个筛选后最小外接矩形分块中筛选的第ph行第qh列的子块对应的四个顶点的坐标四个顶点的坐标对该区域按照重采样分辨率irs
final
结合第一景影像rpc定位模型与辅助dem数据采用间接法进行局部几何纠正,从而得到第一景影像的几何纠正子块,定义为g∈[1,k],h∈[1,o]。
[0140]
其中,表示第g个筛选后最小外接矩形分块中筛选的第ph行第qh列的子块。表示第g个筛选后最小外接矩形分块中筛选的第ph行第qh列的子块经度最小值,表示第g个筛选后最小外接矩形分块中筛选的第ph行第qh列的子块的经度最大值,表示第g个筛选后最小外接矩形分块中筛选的第ph行第qh列的子块的纬度最小值,表示第g个筛选后最小外接矩形分块中筛选的第ph行第qh列的子块的纬度最大值。k表示筛选后最小外接矩形分块的数量,o表示第g个筛选后最小外接矩形分块中筛选的子块的数量;
[0141]
步骤6所述对第二景影像进行局部几何纠正得到第二景影像的多个几何纠正子块,具体如下:
[0142]
根据第g个筛选后最小外接矩形分块中筛选的第ph行第qh列的子块对应的四个顶点的坐标四个顶点的坐标对该区域按照重采样分辨率irs
final
结合第二景影像rpc定位模型与辅助dem数据采用间接法进行局部几何纠正,从而得到第二景影像的几何纠正子块,定义为g∈[1,k],h∈[1,o];
[0143]
其中,表示第g个筛选后最小外接矩形分块中筛选的第ph行第qh列的子块。表示第g个筛选后最小外接矩形分块中筛选的第ph行第qh列的子块经度最小值,表示第g个筛选后最小外接矩形分块中筛选的第ph行第qh列的子块的经度最大值,表示第g个筛选后最小外接矩形分块中筛选的第ph行第qh列的子块的纬度最小值,表示第g个筛选后最小外接矩形分块中筛选的第ph行第qh列的子块的纬度最大值。k表示筛选后最小外接矩形分块的数量,o表示第g个筛选后最小外接矩形分块中筛选的子块的数量。
[0144]
作为优选,步骤7所述采用匹配算法获取多组同名点对位于第一景影像几何纠正子块地理坐标与第二景影像几何纠正子块地理坐标具体如下:
[0145]
对第一景影像几何的每个纠正子块和第二景影像的每个几何纠正子块进行匹配,获得位于第一景影像的每个几何纠正子块上同名点的像素坐标和位于第二景影像的每个几何纠正子块上同名点的像素坐标;
[0146]
对第一景影像的每个几何纠正子块上同名点的像素坐标根据该子块的左上角经纬度获取该子块的最小经度值、最小纬度值,对同名点的像素坐标按照像素坐标与重采样分辨率乘积与最小值之和的方式将其映射为地理坐标;
[0147]
对第二景影像的每个几何纠正子块上同名点的像素坐标根据该子块的左上角经纬度获取该子块的最小经度值、最小纬度值,对同名点的像素坐标按照像素坐标与重采样分辨率乘积与最小值之和的方式将其映射为地理坐标;
[0148]
步骤7所述将第一景影像的每个几何纠正子块地理坐标映射成第一景影像上每个几何纠正子块地理坐标对应的像素坐标为:
[0149]
根据第一景影像的每个几何纠正子块地理坐标在对应的经度、纬度位置从dem辅助数据上采用双线性内插获取对第一景影像的每个几何纠正子块的高程;
[0150]
结合第一景影像的每个几何纠正子块地理坐标、第一景影像的每个几何纠正子块的高程构建第一景影像的每个几何纠正子块的地理三维坐标;
[0151]
结合第一景影像的每个几何纠正子块的地理三维坐标,采用第一景影像的rpc定位模型利用基于rpc的模型正算得到,第一景影像上每个几何纠正子块地理坐标对应的像素坐标;
[0152]
步骤7所述将第二景影像的每个几何纠正子块地理坐标映射到第二景影像上的像素坐标具体如下为:
[0153]
根据第二景影像的每个几何纠正子块地理坐标在对应的经度、纬度位置从dem辅助数据上采用双线性内插获取第二景影像的每个几何纠正子块的的高程;
[0154]
结合第二景影像的每个几何纠正子块地理坐标、第二景影像的每个几何纠正子块的高程构建第二景影像的每个几何纠正子块的地理三维坐标;
[0155]
结合第二景影像的每个几何纠正子块的地理三维坐标,采用第二景影像的rpc定位模型利用基于rpc的模型正算得到,第二景影像上每个几何纠正子块地理坐标对应的像素坐标。
[0156]
作为优选,步骤8所述第一景影像连接点像素坐标为:
[0157]
经过粗差剔除后的第一景影像每个几何纠正子块匹配后经过地理坐标映射的像素坐标;
[0158]
作为优选,步骤8所述第二景影像连接点像素坐标为:
[0159]
经过粗差剔除后的第二景影像每个几何纠正子块匹配后经过地理坐标映射的像素坐标。
[0160]
本发明还提供了一种计算机可读介质,所述计算机可读介质存储电子设备执行的计算机程序,当所述计算机程序在电子设备上运行时,使得所述电子设备执行所述变压器组合状态评估的方法的步骤。
[0161]
本发明优点在于,通过基于物方地理约束对影像进行格网划分,结合重叠率有效剔除无效区域,并通过对子块局部几何纠正消除地形影响从而将遥感影像连接点匹配问题简化为普通视觉图像的匹配,可有效降低遥感影像连接点匹配的门槛。此外,该方法的分块
思路易于并行结构设计,可进一步提高连接点匹配效率。
附图说明
[0162]
图1:本发明实施例的方法流程图。
具体实施方式
[0163]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0164]
具体实施时,本发明技术方案提出的方法可由本领域技术人员采用计算机软件技术实现自动运行流程,实现方法的系统装置例如存储本发明技术方案相应计算机程序的计算机可读存储介质以及包括运行相应计算机程序的计算机设备,也应当在本发明的保护范围内。
[0165]
下面结合图1介绍本发明实施例的技术方案为一种遥感影像连接点匹配方法,具体如下:
[0166]
步骤1:获取第一景影像及对应的rpc定位模型,获取第一景影像的像素宽、像素高以构建第一景影像的像方四角点,利用第一景影像的rpc定位模型反算获得第一景影像的像方四角点对应的物方地理坐标;获取第二景影像及对应的rpc定位模型,获取第二景影像的像素宽、像素高以构建第二景影像的像方四角点,利用第二景影像的rpc定位模型反算获第二景影像的像方四角点对应的物方地理坐标;
[0167]
步骤2,采用第一景影像的像方四角点对应的物方地理坐标构建第一景影像的矢量多边形,采用第二景影像的像方四角点对应的物方地理坐标构建第二景影像的矢量多边形,通过空间求交计算方法计算得到第一景影像的矢量多边形与第二景影像的矢量多边形之间的相交多边形并获取相交多边形的地理范围,根据相交多边形的地理范围构建相交多边形的最小外接矩形。
[0168]
步骤2所述获取相交多边形的地理范围,具体如下:
[0169]
依次获取相交多边形中每个点的经度、每个点的纬度;
[0170]
在相交多边形中多个点的经度中筛选出相交多边形中每个点的经度最小值、相交多边形中每个点的经度最大值构建相交多边形的经度范围,定义如下:
[0171]
[long_min,long_max]
[0172]
其中,long_min表示相交多边形中每个点的经度最小值,long_max表示相交多边形中每个点的经度最大值;
[0173]
在相交多边形中多个点的纬度中筛选出相交多边形中每个点的纬度最小值、相交多边形中每个点的维度最大值,作为相交多边形的纬度范围,定义如下:
[0174]
[lat_min,lat_max]
[0175]
其中,lat_min表示相交多边形中每个点的纬度最小值,lat_max表示相交多边形中每个点的纬度最大值;
[0176]
通过相交多边形的经度范围、相交多边形的纬度范围构建相交多边形的地理范
围;
[0177]
步骤2所述相交多边形的地理范围构建相交多边形的最小外接矩形,具体如下:
[0178]
将(long_min、lat_min)、(long_min、lat_max)、(long_max、lat_max)、(long_min、lat_max)作为相交多边形的最小外接矩形的四个顶点以构建相交多边形的最小外接矩形;
[0179]
步骤3:将dem辅助数据结合第一景影像的rpc定位模型计算得到第一景影像的影像分辨率,将dem辅助数据结合第二景影像的rpc定位模型计算得到第二景影像的影像分辨率,进一步得到重采样分辨率,根据相交多边形的最小外接矩形计算在重采样分辨率下对应的像素宽、像素高;
[0180]
步骤3所述结合第一景影像的rpc定位模型计算得到第一景影像的影像分辨率,具体过程如下:
[0181]
所述第一景影像定义为:imga;
[0182]
获取第一景影像imga像素宽,定义为:imga_w;
[0183]
获取第一景影像imga像素高,定义为:imga_h;
[0184]
获取第一景影像第一像素点的像素坐标,定义为:
[0185][0186]
其中,n表示像素步长,表示第一景影像第一像素点的列坐标,表示第一景影像第一像素点的行坐标,p
1,1
表示第一景影像第一像素点;
[0187]
结合dem辅助数据与第一景影像的rpc定位模型,采用光线追踪法计算第一景影像第一像素点的像素坐标对应的三维地理坐标,定义为:
[0188]
(u
1,1
,v
1,1
,w
1,1
)
[0189]
其中,u
1,1
表示表第一景影像第一像素点三维地理坐标的经度,v
1,1
表示第一景影像第一像素点三维地理坐标的纬度,w
1,1
表示第一景影像第一像素点三维地理坐标的高程;
[0190]
获取第一景影像第二像素点的像素坐标,定义为:
[0191][0192]
其中,n表示像素步长,表示第一景影像第二像素点的列坐标,表示第一景影像第二像素点的列坐标,p
1,2
表示第二景影像第二像素点;
[0193]
结合dem辅助数据与第一景影像rpc定位模型,采用光线追踪法计算第一景影像第二像素点的像素坐标对应的三维地理坐标定义为:
[0194]
(u
1,2
,v
1,2
,w
1,2
)
[0195]
其中,u
1,2
表示表第一景影像第二像素点三维地理坐标的经度,v
1,2
表示第一景影像第二像素点三维地理坐标的纬度,w
1,2
表示第二景影像第一像素点三维地理坐标的高程;
[0196]
计算第一景影像分辨率,具体如下:
[0197][0198]
其中,irs1为第一景影像分辨率,n表示像素步长;
[0199]
步骤3所述结合第二景影像的rpc定位模型计算得到第二景影像的影像分辨率,具体过程如下:
[0200]
所述第二景影像定义为:imgb;
[0201]
获取第二景影像imgb像素宽,定义为:imgb_w;
[0202]
获取第二景影像imgb像素高,定义为:imgb_h;
[0203]
获取第二景影像第一像素点的像素坐标,定义为:
[0204][0205]
其中,n表示像素步长,表示第二景影像第一像素点的列坐标,表示第二景影像第一像素点的行坐标,p
2,1
表示第二景影像第一像素点;
[0206]
结合dem辅助数据与第二景影像的rpc定位模型,采用光线追踪法计算第二景影像第一像素点的像素坐标对应的三维地理坐标,定义为:
[0207]
(u
2,1
,v
2,1
,w
2,1
)
[0208]
其中,u
2,1
表示表第二景影像第一像素点三维地理坐标的经度,v
2,1
表示第二景影像第一像素点三维地理坐标的纬度,w
2,1
表示第二景影像第一像素点三维地理坐标的高程;
[0209]
获取第二景影像第二像素点的像素坐标,定义为:
[0210][0211]
其中,n表示像素步长,表示第二景影像第二像素点的列坐标,表示第二景影像第二像素点的列坐标,p
2,2
表示第二景影像第二像素点;
[0212]
结合dem辅助数据与第二景影像rpc定位模型,采用光线追踪法计算第二景影像第二像素点的像素坐标对应的三维地理坐标定义为:
[0213]
(u
2,2
,v
2,2
,w
2,2
)
[0214]
其中,u
2,2
表示表第二景影像第二像素点三维地理坐标的经度,v
2,2
表示第二景影像第二像素点三维地理坐标的纬度,w
2,2
表示第二景影像第二像素点三维地理坐标的高程;
[0215]
计算第二景影像分辨率,具体如下:
[0216][0217]
其中,irs2为第二景影像分辨率,n表示像素步长;
[0218]
步骤3所述进一步得到重采样分辨率,具体过程如下:
[0219]
将第一景影像分辨率、第二景影像分辨率之间较大值作为重采样分辨率,所述重采样分辨率定义为:irs
final
;
[0220]
步骤3所述根据相交多边形的最小外接矩形计算在重采样分辨率下对应的像素宽m_w、像素高m_h,公式如下:
[0221]
[0222]
其中,m_w表示相交多边形的最小外接矩形计算在重采样分辨率下对应的像素宽,m_h相交多边形的最小外接矩形计算在重采样分辨率下对应的表示像素高,irs
final
表示重采样分辨率,long_min表示相交多边形中每个点的经度最小值,long_max表示相交多边形中每个点的经度最大值,lat_min表示相交多边形中每个点的纬度最小值,lat_max表示相交多边形中每个点的纬度最大值;
[0223]
步骤4:对相交多边形的最小外接矩形进行格网划分得到多个最小外接矩形分块,依次计算每个最小外接矩形分块与相交多边形的重叠率,进一步在多个最小外接矩形分块中筛选出与相交多边形的重叠率大于重叠率阈值的最小外接矩形分块作为多个筛选后最小外接矩形分块;
[0224]
步骤4所述对相交多边形的最小外接矩形进行格网划分得到多个最小外接矩形分块,具体过程如下:
[0225]
设定列方向分格网划分个数为nblk_x,设定行方向分格网划分个数为nblk_y;
[0226]
计算每个最小外接矩形分块的像素宽、每个最小外接矩形分块的像素高,具体如下:
[0227][0228]
其中,blockx为每个最小外接矩形分块的像素宽度,blocky为每个最小外接矩形分块的像素高度,nblk_x为列方向分格网划分个数,nblk_y为设定行方向分格网划分个数,m_w表示相交多边形的最小外接矩形计算在重采样分辨率下对应的像素宽,m_h相交多边形的最小外接矩形计算在重采样分辨率下对应的表示像素高;
[0229]
第j行第i列的最小外接矩形分块,定义为:
[0230]
blk
i,j
[0231]
i∈[1,nblk_x],j∈[1,nblk_y]
[0232]
其中,i表示列方向的分块序号,j表示行方向的分块序号,nblk_x为列方向分格网划分个数,nblk_y为设定行方向分格网划分个数;
[0233]
计算第j行第i列的最小外接矩形分块的左上角像素坐标,具体如下:
[0234][0235][0236][0237]
其中,blockx为每个最小外接矩形分块的像素宽度,blocky为每个最小外接矩形分块的像素高度,表示第j行第i列的最小外接矩形分块的左上角像素坐标,表示第j行第i列的最小外接矩形分块的左上角像素坐标的行坐标,表示第j行第i列的最小外接矩形分块的左上角像素坐标的列坐标;
[0238]
计算第j行第i列的最小外接矩形分块的右下角像素坐标,具体如下:
[0239][0240]
[0241][0242]
其中,表示第j行第i列的最小外接矩形分块的右下角像素坐标,表示第j行第i列的最小外接矩形分块的右下角像素坐标的行坐标,表示第j行第i列的最小外接矩形分块的右下角像素坐标的列坐标;
[0243]
依次计算第j行第i列的最小外接矩形分块的最小外接矩形的经度最小值、经度最大值、纬度最小值、纬度最大值,具体如下:
[0244][0245]
其中,表示第j行第i列的最小外接矩形分块的经度最小值,表示第j行第i列的最小外接矩形分块的经度最大值,表示第j行第i列的最小外接矩形分块的纬度最小值,表示第j行第i列的最小外接矩形分块的纬度最大值,long_min表示相交多边形中每个点的经度最小值,long_max表示相交多边形中每个点的经度最大值,lat_min表示相交多边形中每个点的纬度最小值,lat_max表示相交多边形中每个点的纬度最大值;
[0246]
将将作为四个顶点以构建第j行第i列的最小外接矩形分块对应的地理矩形分块;
[0247]
步骤4所述依次计算每个最小外接矩形分块与相交多边形的重叠率,具体如下:
[0248]
第j行第i列的最小外接矩形分块的重叠率,计算方式如下:
[0249][0250]
其中,i表示列方向的分块序号,j表示行方向的分块序号,nblk_x为列方向分格网划分个数,nblk_y为设定行方向分格网划分个数,表示第j行第i列的最小外接矩形分块的重叠率,intersect(*)表示空间求交操作,area(*)表示计算多边形面积,blk
i,j
代表第j行第i列的最小外接矩形分块,roigeopoly代表相交多边形;
[0251]
若则
[0252]
若则
[0253]
其中,α表示重叠率阈值,表示第j行第i列的最小外接矩形分块的属性;
[0254]
步骤4所述多个筛选后最小外接矩形分块获取方式如下:
[0255]
在多个最小外接矩形分块中筛选出的最小外接矩形分块,得到多个筛选后最小外接矩形分块,具体定义如下:
[0256][0257]
g∈[1,k],ig∈[1,nblk_x],jg∈[1,nblk_y]
[0258]
其中,i表示列方向的分块序号,j表示行方向的分块序号,nblk_x为列方向分格网划分个数,nblk_y为设定行方向分格网划分个数,表示第g个筛选后最小外接矩形分块,即第ig行第jg列的最小外接矩形分块,k表示筛选后最小外接矩形分块的数量;
[0259]
步骤5:对多个筛选后最小外接矩形分块依次进行格网划分,得到每个筛选后最小外接矩形分块的多个子块,依次计算每个筛选后最小外接矩形分块的每个子块与相交多边形的重叠率,进一步在每个筛选后最小外接矩形分块的多个子块中筛选出与相交多边形的重叠率大于精细重叠率阈值的每个筛选后最小外接矩形分块的子块作为每个筛选后最小外接矩形分块的多个筛选后子块;
[0260]
步骤5所述对多个筛选后最小外接矩形分块依次进行格网划分,得到每个筛选后最小外接矩形分块的多个子块,具体如下:
[0261]
设定分块列方向分格网划分个数为ncel_x,设定分块行方向分格网划分个数ncel_y;
[0262]
计算每个筛选后最小外接矩形分块的子块的像素宽、每个筛选后最小外接矩形分块的子块的像素高,具体如下:
[0263][0264]
其中,cellx为每个筛选后最小外接矩形分块的子块的像素宽度、celly每个筛选后最小外接矩形分块的子块的像素高度;ncel_x为分块列方向分格网划分个数,ncel_y为分块行方向分格网划分个数,blockx为每个最小外接矩形分块的像素宽度,blocky为每个最小外接矩形分块的像素高度;
[0265]
在第g个筛选后最小外接矩形分块中第q行第p列的子块,定义为:
[0266][0267]
g∈[1,k],q∈[1,ncel_x],p∈[1,ncel_y]
[0268]
其中,g表示筛选后最小外接矩形分块的子块,k表示筛选后最小外接矩形分块的数量,q表示列方向的子块序号,p表示行方向的子块序号,ncel_x为分块列方向分格网划分个数,ncel_y为分块行方向分格网划分个数。
[0269]
计算第g个筛选后最小外接矩形分块中第q行第p列的子块的左上角像素坐标,具体如下:
[0270][0271][0272][0273]
其中,cellx为每个筛选后最小外接矩形分块的子块的像素宽度、celly每个筛选后最小外接矩形分块的子块的像素高度,表示第g个筛选后最小外接矩形分块中第q行第p列的子块的左上角像素坐标,表示第g个筛选后最小外接矩形分块中第q行第p列的子块的左上角像素坐标的行坐标,表示第g个筛选后最小外接矩形分块中第q行
第p列的子块的左上角像素坐标的列坐标。表示第g个筛选后最小外接矩形分块,且位于第j行第i列的左上角像素坐标的行坐标,表示第g个筛选后最小外接矩形分块,且位于第j行第i列的左上角像素坐标的列坐标。
[0274]
计算第g个筛选后最小外接矩形分块中第q行第p列的子块的右下角像素坐标,具体如下:
[0275][0276][0277][0278]
其中,cellx为每个筛选后最小外接矩形分块的子块的像素宽度、celly每个筛选后最小外接矩形分块的子块的像素高度,表示第g个筛选后最小外接矩形分块中第q行第p列的子块的右下角像素坐标,表示第g个筛选后最小外接矩形分块中第q行第p列的子块的右下角像素坐标的行坐标,表示第g个筛选后最小外接矩形分块中第q行第p列的子块的右下角像素坐标的列坐标。表示第g个筛选后最小外接矩形分块,且位于第j行第i列的左上角像素坐标的行坐标,表示第g个筛选后最小外接矩形分块,且位于第j行第i列的左上角像素坐标的列坐标;
[0279]
依次计算第g个筛选后最小外接矩形分块中第q行第p列的子块的经度最小值、经度最大值、纬度最小值、纬度最大值,具体如下:
[0280][0281]
其中,表示第g个筛选后最小外接矩形分块中第q行第p列的子块经度最小值,表示第g个筛选后最小外接矩形分块中第q行第p列的子块的经度最大值,表示第g个筛选后最小外接矩形分块中第q行第p列的子块的纬度最小值,表示第g个筛选后最小外接矩形分块中第q行第p列的子块的纬度最大值,long_min表示相交多边形中每个点的经度最小值,long_max表示相交多边形中每个点的经度最大值,lat_min表示相交多边形中每个点的纬度最小值,lat_max表示相交多边形中每个点的纬度最大值;
[0282]
将将作为四个顶点以构建第g个筛选后最小外接矩形分块中第q行第p列的子块对应的地理矩形分块;
[0283]
步骤5所述计算每个筛选后最小外接矩形分块的每个子块与相交多边形的重叠率,具体如下:
[0284][0285]
g∈[1,k],q∈[1,ncel_x],p∈[1,ncel_y]
[0286]
其中,g表示筛选后最小外接矩形分块的子块,k表示筛选后最小外接矩形分块的数量,q表示列方向的子块序号,p表示行方向的子块序号,ncel_x为分块列方向分格网划分个数,ncel_y为分块行方向分格网划分个数。表示第g个筛选后最小外接矩形分块中第q行第p列的子块的重叠率,intersect(*)表示空间求交操作,area(*)表示计算多边形面积,代表第g个筛选后最小外接矩形分块中第q行第p列的子块,roigeopoly代表相交多边形;
[0287]
若则
[0288]
若则
[0289]
其中,β表示重叠率阈值,表示第g个筛选后最小外接矩形分块中第q行第p列的子块的属性;
[0290]
步骤5所述筛选后最小外接矩形分块的多个筛选后子块获取方式如下:
[0291]
在筛选后最小外接矩形分块的多个筛选后子块中筛选出的子块块,得到筛选后最小外接矩形分块的多个筛选后子块,具体定义如下:
[0292][0293]
g∈[1,k],h∈[1,o],qh∈[1,ncel_x],ph∈[1,ncel_y]
[0294]
其中,g表示筛选后最小外接矩形分块的子块,k表示筛选后最小外接矩形分块的数量,qh表示列方向的子块序号,ph表示行方向的子块序号,ncel_x为分块列方向分格网划分个数,ncel_y为分块行方向分格网划分个数,表示第g个筛选后最小外接矩形分块中筛选的第h个子块,即第g个筛选后最小外接矩形分块中筛选的第ph行第qh列的子块,o表示第g个筛选后最小外接矩形分块中筛选的子块的数量。
[0295]
步骤6:根据每个筛选后最小外接矩形分块的每个筛选后矩形子块,结合dem辅助数据,对第一景影像进行局部几何纠正得到第一景影像的多个几何纠正子块,根据每个筛选后最小外接矩形分块的每个筛选后子块的四角经纬度,结合dem辅助数据,对第二景影像进行局部几何纠正得到第二景影像的多个几何纠正子块;
[0296]
步骤6所述对第一景影像进行局部几何纠正得到第一景影像的多个几何纠正子块,具体如下:
[0297]
根据第g个筛选后最小外接矩形分块中筛选的第ph行第qh列的子块对应的四个顶点的坐标四个顶点的坐标对该区域按照重采样分辨率irs
final
结合第一景影像rpc定位模型与辅助dem数据采用间接法进行局部几何纠正,从而得到第一景影像的几何纠正子块,定义为g∈[1,k],h∈[1,o]。
[0298]
其中,表示第g个筛选后最小外接矩形分块中筛选的第ph行第qh列的子块。
表示第g个筛选后最小外接矩形分块中筛选的第ph行第qh列的子块经度最小值,表示第g个筛选后最小外接矩形分块中筛选的第ph行第qh列的子块的经度最大值,表示第g个筛选后最小外接矩形分块中筛选的第ph行第qh列的子块的纬度最小值,表示第g个筛选后最小外接矩形分块中筛选的第ph行第qh列的子块的纬度最大值。k表示筛选后最小外接矩形分块的数量,o表示第g个筛选后最小外接矩形分块中筛选的子块的数量;
[0299]
步骤6所述对第二景影像进行局部几何纠正得到第二景影像的多个几何纠正子块,具体如下:
[0300]
根据第g个筛选后最小外接矩形分块中筛选的第ph行第qh列的子块对应的四个顶点的坐标四个顶点的坐标对该区域按照重采样分辨率irs
final
结合第二景影像rpc定位模型与辅助dem数据采用间接法进行局部几何纠正,从而得到第二景影像的几何纠正子块,定义为g∈[1,k],h∈[1,o];
[0301]
其中,表示第g个筛选后最小外接矩形分块中筛选的第ph行第qh列的子块。表示第g个筛选后最小外接矩形分块中筛选的第ph行第qh列的子块经度最小值,表示第g个筛选后最小外接矩形分块中筛选的第ph行第qh列的子块的经度最大值,表示第g个筛选后最小外接矩形分块中筛选的第ph行第qh列的子块的纬度最小值,表示第g个筛选后最小外接矩形分块中筛选的第ph行第qh列的子块的纬度最大值。k表示筛选后最小外接矩形分块的数量,o表示第g个筛选后最小外接矩形分块中筛选的子块的数量。
[0302]
步骤7:将每个第一景影像几何纠正子块作为参考影像、第二景影像几何纠正子块作为配准影像,采用匹配算法获取多组同名点对位于第一景影像几何纠正子块地理坐标与第二景影像几何纠正子块地理坐标;将第一景影像的每个几何纠正子块地理坐标映射成第一景影像上每个几何纠正子块地理坐标对应的像素坐标,第二景影像的每个几何纠正子块地理坐标映射成第二景影像上每个几何纠正子块地理坐标对应的像素坐标;
[0303]
步骤7所述采用匹配算法获取多组同名点对位于第一景影像几何纠正子块地理坐标与第二景影像几何纠正子块地理坐标具体如下:
[0304]
对第一景影像几何的每个纠正子块和第二景影像的每个几何纠正子块进行匹配,获得位于第一景影像的每个几何纠正子块上同名点的像素坐标和位于第二景影像的每个几何纠正子块上同名点的像素坐标;
[0305]
对第一景影像的每个几何纠正子块上同名点的像素坐标根据该子块的左上角经纬度获取该子块的最小经度值、最小纬度值,对同名点的像素坐标按照像素坐标与重采样分辨率乘积与最小值之和的方式将其映射为地理坐标;
[0306]
对第二景影像的每个几何纠正子块上同名点的像素坐标根据该子块的左上角经纬度获取该子块的最小经度值、最小纬度值,对同名点的像素坐标按照像素坐标与重采样分辨率乘积与最小值之和的方式将其映射为地理坐标;
[0307]
步骤7所述将第一景影像的每个几何纠正子块地理坐标映射成第一景影像上每个几何纠正子块地理坐标对应的像素坐标为:
[0308]
根据第一景影像的每个几何纠正子块地理坐标在对应的经度、纬度位置从dem辅助数据上采用双线性内插获取对第一景影像的每个几何纠正子块的高程;
[0309]
结合第一景影像的每个几何纠正子块地理坐标、第一景影像的每个几何纠正子块的高程构建第一景影像的每个几何纠正子块的地理三维坐标;
[0310]
结合第一景影像的每个几何纠正子块的地理三维坐标,采用第一景影像的rpc定位模型利用基于rpc的模型正算得到,第一景影像上每个几何纠正子块地理坐标对应的像素坐标;
[0311]
步骤7所述将第二景影像的每个几何纠正子块地理坐标映射到第二景影像上的像素坐标具体如下为:
[0312]
根据第二景影像的每个几何纠正子块地理坐标在对应的经度、纬度位置从dem辅助数据上采用双线性内插获取第二景影像的每个几何纠正子块的的高程;
[0313]
结合第二景影像的每个几何纠正子块地理坐标、第二景影像的每个几何纠正子块的高程构建第二景影像的每个几何纠正子块的地理三维坐标;
[0314]
结合第二景影像的每个几何纠正子块的地理三维坐标,采用第二景影像的rpc定位模型利用基于rpc的模型正算得到,第二景影像上每个几何纠正子块地理坐标对应的像素坐标;
[0315]
步骤8:将第一景影像上每个几何纠正子块地理坐标对应的像素坐标与第二景影像上每个几何纠正子块地理坐标对应的像素坐标采用随机抽样一致性算法进行粗差剔除,得到第一景影像连接点像素坐标、第二景影像连接点像素坐标;
[0316]
步骤8所述第一景影像连接点像素坐标为:
[0317]
经过粗差剔除后的第一景影像每个几何纠正子块匹配后经过地理坐标映射的像素坐标;
[0318]
步骤8所述第二景影像连接点像素坐标为:
[0319]
经过粗差剔除后的第二景影像每个几何纠正子块匹配后经过地理坐标映射的像素坐标。
[0320]
本发明的具体实施例还提供了一种计算机可读介质。
[0321]
所述计算机可读介质为服务器工作站;
[0322]
所述服务器工作站存储电子设备执行的计算机程序,当所述计算机程序在电子设备上运行时,使得所述电子设备执行本发明实施例的遥感影像连接点匹配方法的步骤。
[0323]
应当理解的是,本说明书未详细阐述的部分均属于现有技术。
[0324]
应当理解的是,上述针对较佳实施例的描述较为详细,并不能因此而认为是对本发明专利保护范围的限制,本领域的普通技术人员在本发明的启示下,在不脱离本发明权利要求所保护的范围情况下,还可以做出替换或变形,均落入本发明的保护范围之内,本发明的请求保护范围应以所附权利要求为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
