技术特征:
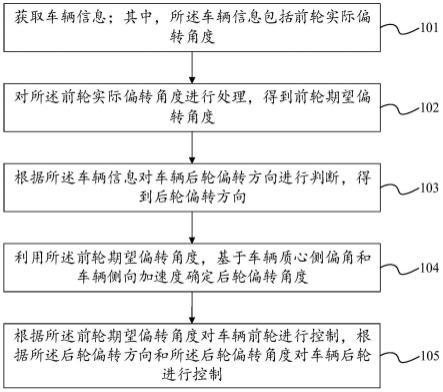
1.一种前后轮的控制方法,其特征在于,所述方法包括:获取车辆信息;其中,所述车辆信息包括前轮实际偏转角度;对所述前轮实际偏转角度进行处理,得到前轮期望偏转角度;根据所述车辆信息对车辆后轮偏转方向进行判断,得到后轮偏转方向;利用所述前轮期望偏转角度,基于车辆质心侧偏角和车辆侧向加速度确定后轮偏转角度;根据所述前轮期望偏转角度对车辆前轮进行控制,根据所述后轮偏转方向和所述后轮偏转角度对车辆后轮进行控制。2.根据权利要求1所述的方法,其特征在于,所述车辆信息包括:车辆速度、前轮平均滑转率和前轮平均滑移率;所述对所述前轮实际偏转角度进行处理,得到前轮期望偏转角度,包括:通过查询车辆速度、前轮平均滑转率与前轮转角控制系数关系表,得到前轮转角控制系数;或者,通过查询车辆速度、前轮平均滑移率与前轮转角控制系数关系表,得到前轮转角控制系数;根据所述前轮转角控制系数和所述前轮实际偏转角度进行处理,得到前轮期望偏转角度:δ1=d*δ其中,δ1为前轮期望偏转角度,d为前轮转角控制系数,δ为前轮实际偏转角度。3.根据权利要求1所述的方法,其特征在于,所述利用所述前轮期望偏转角度,基于车辆质心侧偏角和车辆侧向加速度确定后轮偏转角度,包括:基于车辆质心侧偏角和车辆侧向加速度确定的后轮转角关系函数对所述前轮期望偏转角度进行处理得到后轮偏转角度;其中,所述后轮转角关系函数是根据车辆二自由度模型算法得到的。4.根据权利要求1所述的方法,其特征在于,在基于车辆质心侧偏角和车辆侧向加速度确定的后轮转角关系函数对所述前轮期望偏转角度进行处理得到后轮偏转角度之前,还包括:基于车辆二自由度模型算法得到车辆质心侧偏角函数,所述车辆质心侧偏角函数中包括车辆质心侧偏角和车辆侧向加速度;确定所述车辆质心侧偏角和所述车辆侧向加速度满足预设条件,根据所述车辆质心侧偏角函数及所述前轮期望偏转角度得到后轮转角关系函数。5.根据权利要求4所述的方法,其特征在于,所述基于车辆二自由度模型算法得到车辆质心侧偏角函数,包括:基于所述车辆二自由度模型算法,得到车辆质心侧偏角函数:其中,m为整车质量,a为质心到前轴的距离,b为质心到后轴的距离,k1为前轴的侧偏刚度,k2为后轴的侧偏刚度,u为纵向车速,为车辆加速度,β为车辆质心侧偏角,ω
r
为车辆横摆角速度,δ1为前轮偏转角度,δ2为后轮偏转角度。
6.根据权利要求5所述的方法,其特征在于,所述确定所述车辆质心侧偏角和所述车辆侧向加速度满足预设条件,根据所述车辆质心侧偏角函数及所述前轮期望偏转角度得到后轮转角关系函数,包括:确定所述质心侧偏角为零和所述车辆侧向加速度为零,根据所述车辆质心侧偏角函数,确定所述后轮转角关系函数:7.根据权利要求1所述的方法,其特征在于,所述根据所述车辆信息对车辆后轮偏转方向进行判断,得到后轮偏转方向,包括:根据所述车辆信息对车辆状态进行判断,确定车辆状态;响应于确定所述车辆状态为驱动状态,计算得到车辆轮胎的滑转率,根据所述车辆轮胎的滑移率确定后轮偏转方向,其中,所述车辆轮胎的滑转率包括:前轮滑转率和后轮滑转率;或者,响应于确定所述车辆状态为制动状态,计算得到车辆轮胎的滑移率,根据所述车辆轮胎的滑转率确定后轮偏转方向,其中,所述车辆轮胎的滑移率包括:前轮滑移率和后轮滑移率。8.根据权利要求7所述的方法,其特征在于,所述响应于确定所述车辆状态为驱动状态,计算得到车辆轮胎的滑转率,根据所述车辆轮胎的滑移率确定后轮偏转方向,包括:响应于确定车辆为驱动状态,至少一个前轮滑转率满足前轮第一滑转率条件,且至少一个后轮滑转率满足后轮第一滑转率条件时,车辆为转向不足状态,车辆的后轮偏转方向为与前轮反向偏转;响应于确定车辆为驱动状态,至少一个前轮滑转率满足前轮第二滑转率条件,且至少一个后轮滑移率满足后轮第二滑转率条件时,车辆为转向过度状态,车辆的后轮偏转方向为与前轮同向偏转;所述响应于确定所述车辆状态为制动状态,计算得到车辆轮胎的滑移率,根据所述车辆轮胎的滑转率确定后轮偏转方向,包括:响应于确定车辆为制动状态,至少一个前轮滑转率满足前轮第一滑移率条件,且至少一个后轮滑移率满足后轮第一滑移率条件时,车辆为转向不足状态,车辆的后轮偏转方向为与前轮反向偏转;响应于确定车辆为制动状态,至少一个前轮滑移率满足前轮第二滑移率条件,且至少一个后轮滑移率满足后轮第二滑移率条件时,车辆为转向过度状态,车辆的后轮偏转方向为与前轮同向偏转。9.一种前后轮的控制系统,其特征在于,包括:车辆信息获取模块,被配置为获取车辆信息;其中,所述车辆信息包括前轮实际偏转角度;前轮期望偏转角度获取模块,被配置为对所述前轮实际偏转角度进行处理,得到前轮期望偏转角度;后轮偏转方向获取模块,被配置为根据所述车辆信息对车辆后轮偏转方向进行判断,
得到后轮偏转方向;后轮偏转角度获取模块,被配置为利用所述前轮期望偏转角度,基于车辆质心侧偏角和车辆侧向加速度确定后轮偏转角度;车辆控制模块,被配置为根据所述前轮期望偏转角度对车辆前轮进行控制,根据所述后轮偏转方向和所述后轮偏转角度对车辆后轮进行控制。10.一种电子设备,其特征在于,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如权利要求1至8任意一项所述的方法。11.一种非暂态计算机可读存储介质,其特征在于,所述非暂态计算机可读存储介质存储计算机指令,所述计算机指令用于使计算机执行权利要求1至8任意一项所述的方法。12.一种车辆,其特征在于,包括权利要求9所述的前后轮的控制系统或权利要求10所述的电子设备或权利要求11所述的存储介质。
技术总结
本公开提供一种前后轮的控制方法、系统、电子设备、存储介质及车辆。所述方法包括:获取车辆信息;其中,所述车辆信息包括前轮实际偏转角度;对所述前轮实际偏转角度进行处理,得到前轮期望偏转角度;根据所述车辆信息对车辆后轮偏转方向进行判断,得到后轮偏转方向;利用所述前轮期望偏转角度,基于车辆质心侧偏角和车辆侧向加速度确定后轮偏转角度;根据所述前轮期望偏转角度对车辆前轮进行控制,根据所述后轮偏转方向和所述后轮偏转角度对车辆后轮进行控制。轮进行控制。轮进行控制。
技术研发人员:刘福星 周德祥
受保护的技术使用者:长城汽车股份有限公司
技术研发日:2022.11.16
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。