1.本发明涉及农业器械技术领域,具体涉及一种智能犁塘机。
背景技术:
2.在鱼塘养殖生产中,鱼塘内会不断产生死亡生物体、鱼养粪便、残饵和有机肥等物质,由于长期养殖后池底便会积成厚厚的淤泥,造成水质恶化,严重的还会制造出有毒有害物质,破坏了池塘水体的生态环境,导致水产品质量造成影响,因此养殖池塘的过程中,需要经常翻动池塘底部淤泥,以减少耗氧因子,促进淤泥中的有机物氧化分解,降低夜间下层水的实际耗氧量,同时防止水质因长期堆积厌氧菌,导致水体恶化,令鱼中毒,现有的池塘底部清理淤泥的较为常见方法有自然法、人工法、机械法、化学法、生物化,其中自然法是将池塘排水,将池底曝晒后再清泥,人工法是人工下水铲淤泥,而机械法是利用大型机械挖泥,化学法是将池塘排水后,加化学药剂对淤泥进行处理,而生物法是利用动植物、微生物清除淤泥,但是这些方法大都需要将池塘排水,清理淤泥前有较大的工作量,而在养殖过程中较难对池底淤泥进行清理,且一些清理方法中需要花费较大人力,同时清理成本较高。
技术实现要素:
3.为了克服上述的技术问题,本发明的目的在于提供一种智能犁塘机,通过转动筒两侧均固定连接有螺旋片,潜水履带底盘可以带动机体与翻动模块在池塘底部行走,驱动电机可以使螺旋片转动,使池塘底部淤泥和泥土层进行翻转打散,把原有的淤泥和池塘底的泥土混合,使塘底变得有机化,这样不需要大量排水,可以节省人工,降低清理成本。
4.本发明的目的可以通过以下技术方案实现:
5.一种智能犁塘机,包括行进模块与翻动模块,所述行进模块包括潜水履带底盘与机体,所述潜水履带底盘顶面与机体底面固定连接,所述翻动模块包括连接架,所述机体内部设置有动力机构,所述动力机构输出端与连接架侧面传动连接,所述连接架内侧面转动连接有转动筒,所述转动筒两侧均固定连接有螺旋片,所述连接架侧面固定连接有驱动盒,所述驱动盒内部设置有驱动电机,所述驱动电机输出端与连接架侧面转动连接,且驱动电机输出端与转动筒一端传动连接。
6.潜水履带底盘与机体可以组成潜水履带机器人,配合翻动模块可以在池塘底部前进并将淤泥进行翻转打散,潜水履带底盘内部具有发动机,发动机可以使潜水履带底盘的轮子转动,使潜水履带底盘前进,潜水履带底盘可以带动机体与翻动模块前进,可以启动驱动电机,驱动电机可以带动转动筒转动,使转动筒带动螺旋片转动,使池塘底部淤泥和泥土层进行翻转打散,把原有的淤泥和池塘底的泥土混合,使塘底变得有机化,且可在机体内部设置rtk设备,通过rtk导航技术对犁塘机进行导航,这样犁塘机可以按预定路线在塘底自动行走,这样不需要大量排水,可以节省人工,降低清理成本。
7.进一步在于:所述潜水履带底盘两侧侧面均固定连接有调节杆,所述调节杆内侧面转动连接有丝杆,所述丝杆侧面旋合连接有与调节杆内侧面滑动连接的调节块,所述调
节块底面固定连接有与调节杆底面滑动连接的配重块,所述配重块侧面与潜水履带底盘侧面滑动连接,丝杆转动可以使调节块带动配重块移动,犁塘机在斜坡上移动时,可以将配重块移动到犁塘机高度较高的一侧,使犁塘机高度较高的一侧较为稳定地与地面接触,以避免犁塘机翻转,有利于犁塘机在斜坡上稳定前进。
8.进一步在于:两个所述调节杆一端固定连接有连接框,且两个丝杆一端均与连接框内侧面转动连接,所述丝杆位于连接框内的侧面固定套接有皮带轮,且两个皮带轮通过皮带传动连接,所述潜水履带底盘一侧侧面固定连接有与相邻调节杆另一端固定连接的动力盒,所述动力盒内部设置有动力电机,所述动力电机输出端与相邻丝杆另一端传动连接,动力电机可以带动一个丝杆转动,一个丝杆可以通过皮带轮带动另一个丝杆转动,使两个丝杆同步转动,同时调节两侧的配重块的位置,从而进行自动调节。
9.进一步在于:所述调节杆两个内侧面底部均固定连接有与调节块侧面滑动连接的限位杆,限位杆可以挡住调节块底部,对调节块进行支撑限位。
10.进一步在于:所述调节杆顶部设置有与机体侧面固定连接的两个气囊与两个连通管,两个所述气囊位于两个连通管之间,两个所述气囊顶面与底面相远离一侧均与相邻连通管一端连通,所述气囊侧面设置有滚压杆,滚压杆移动时可以碾压气囊,使一个气囊内的气体通过连通管进入另一个气囊内部,从而根据需要使机体前侧或后侧的气囊鼓起,机体在斜坡上前进时,使远离配重块的气囊鼓起,配合配重块调整犁塘机的重心位置,有利于提高调整效果,且在犁塘机前侧或后侧陷进淤泥内时,可以使配重块远离犁塘机陷进的一侧移动,并使位于犁塘机陷进淤泥的一侧的气囊鼓起,使犁塘机陷进淤泥的一侧可以尽可能翘起,使犁塘机脱离,有利于保证犁塘机的顺利移动。
11.进一步在于:所述机体两个侧面均固定两个定位框,两个所述气囊位于相邻两个定位框之间,所述定位框内侧面滑动连接有滑动杆,所述滚压杆顶端与底端均通过轴杆与相邻滑动杆内侧面转动连接,所述调节块顶面固定固定连接有与调节杆内侧面滑动连接的连接块,所述连接块顶部侧面与相邻定位框内侧面滑动连接,且连接块顶部侧面与相邻滑动杆侧面固定连接,两个滚压杆可以通过滑动杆同步移动,使一个滚压杆碾压一个气囊,并使另一个滚压杆放开另一个气囊,有利于另一个气囊的顺利鼓起,而连接块可以限制滑动杆的位置,使滑动杆沿定位框内部移动,同时定位框可以对滚压杆进行限位,使滚压杆保持碾压气囊,而调节块可以通过连接块带动滑动杆移动,从而使滚压杆移动,这样在调整配重块位置时,可以同步使滚压杆移动,使远离配重块一侧的气囊鼓起,便于调整的进行。
12.进一步在于:所述螺旋片内侧面固定连接有与转动筒侧面固定连接的若干气管,所述转动筒侧面对应若干气管开设有若干连通槽一,所述连通槽一与相邻气管一端连通,所述转动筒内侧面转动连接有与连接架侧面固定连接的固定筒,所述固定筒侧面底部对应若干连通槽一开设有若干连通槽二,所述连接架侧面固定连接有与固定筒连通的送气机构,送气机构可以向固定筒内送气,转动筒可以带动气管转动,在连通槽一转动到对应的连通槽二的位置时,固定筒内的空气可以穿过连通槽二与连通槽一进入气管内,然后通过气管移动到池塘底部,由于连通槽二位于固定筒底部,这样在翻动淤泥与池底泥土时,可以始终向淤泥与泥土混合部分注入空气,提高池底的含氧量,降低厌氧菌的含量,且提高池底含氧量,有利于缓解翻动池底,使池底水较为浑浊对鱼类的影响。
13.进一步在于:所述送气机构包括浮板,所述浮板顶面固定连接有气泵,所述气泵出
气端连通有与浮板内侧面固定连接的软管,所述软管底端穿过连接架与固定筒一端连通,浮板可以在水面上漂浮,气泵可以将外界空气送入软管内,空气可以沿软管进入固定筒内,从而对池底注气。
14.本发明的有益效果:
15.1、通过转动筒两侧均固定连接有螺旋片,潜水履带底盘与机体可以组成潜水履带机器人,潜水履带底盘可以带动机体与翻动模块在池塘底部行走,在行走的过程中,可以启动驱动电机,使转动筒带动螺旋片转动,使池塘底部淤泥和泥土层进行翻转打散,把原有的淤泥和池塘底的泥土混合,使塘底变得有机化,且可以在机体内部设置rtk设备,通过rtk导航技术使犁塘机在塘底自动行走,这样不需要大量排水,可以节省人工,降低清理成本;
16.2、通过气囊侧面设置有滚压杆,可以通过动力电机调整配重块与滚压杆的位置,滚压杆在移动过程中可以对气囊进行挤压,使远离配置块的气囊鼓起,这样通过配重块与鼓起的气囊改变犁塘机的重心位置,在犁塘机爬坡时,可以使其重心位于犁塘机前侧,以避免犁塘机翻转,有利于犁塘机在斜坡上稳定前进,且在潜水履带底盘前侧或后侧陷进淤泥内时,可以通过改变犁塘机的重心位置,使潜水履带底盘陷进淤泥内的前侧或后侧翘起,有利于犁塘机的行进。
附图说明
17.下面结合附图对本发明作进一步的说明。
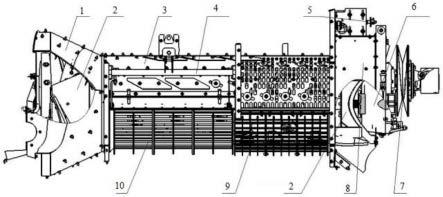
18.图1是本发明一种智能犁塘机整体结构示意图;
19.图2是本发明中的行进模块结构示意图;
20.图3是本发明中的行进模块部分结构示意图;
21.图4是本发明中的调节杆结构示意图;
22.图5是本发明中的连接框内部仰视结构示意图;
23.图6是本发明中的气囊结构示意图;
24.图7是本发明中的定位框结构示意图;
25.图8是本发明中的翻动模块正视结构示意图;
26.图9是本发明中的转动筒结构示意图;
27.图10是本发明中的转动筒内部侧视结构示意图。
28.图中:100、行进模块;110、潜水履带底盘;120、机体;130、调节杆;131、调节块;132、配重块;133、丝杆;134、连接块;135、限位杆;136、皮带轮;140、气囊;141、滚压杆;150、连接框;160、定位框;161、滑动杆;170、连通管;180、动力盒;200、翻动模块;210、连接架;220、转动筒;221、螺旋片;222、气管;223、连通槽一;230、驱动盒;240、固定筒;241、连通槽二;250、送气机构;251、浮板;252、软管;253、气泵。
具体实施方式
29.下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
30.请参阅图1-10所示一种智能犁塘机,包括行进模块100与翻动模块200,行进模块100包括潜水履带底盘110与机体120,潜水履带底盘110顶面与机体120底面固定连接,翻动模块200包括连接架210,机体120内部设置有动力机构,动力机构输出端与连接架210侧面传动连接,连接架210内侧面转动连接有转动筒220,转动筒220两侧均固定连接有螺旋片221,连接架210侧面固定连接有驱动盒230,驱动盒230内部设置有驱动电机,驱动电机输出端与连接架210侧面转动连接,且驱动电机输出端与转动筒220一端传动连接。
31.潜水履带底盘110与机体120可以组成潜水履带机器人,配合翻动模块200可以在池塘底部前进并将淤泥进行翻转打散,潜水履带底盘110内部具有发动机,发动机可以使潜水履带底盘110的轮子转动,使潜水履带底盘110前进,潜水履带底盘110可以带动机体120与翻动模块200前进,可以启动驱动电机,驱动电机可以带动转动筒220转动,使转动筒220带动螺旋片221转动,使池塘底部淤泥和泥土层进行翻转打散,把原有的淤泥和池塘底的泥土混合,使塘底变得有机化,且可在机体120内部设置rtk设备,通过rtk导航技术对犁塘机进行导航,这样犁塘机可以按预定路线在塘底自动行走,这样不需要大量排水,可以节省人工,降低清理成本。
32.动力机构可以为减速电机,在机体120内部设置可以转动的连接轴,连接轴侧面固定两个连接板,连接板与连接架210侧面固定连接,减速电机输出端可以与连接轴传动连接,这样可以通过减速电机带动连接轴转动,连接轴通过连接板带动连接架210转动,从而将翻动模块200降下,使螺旋片221与淤泥接触,从而通过螺旋片221翻动淤泥;可以在机体120四周设置摄像头与传感器,并在机体120内部设置中央控制处理器,通过摄像头与传感器了解池塘底部淤泥的信息,并通过中央控制处理器对信息进行处理,以判断淤泥的翻动情况,并了解淤泥的积累情况等。
33.潜水履带底盘110两侧侧面均固定连接有调节杆130,调节杆130内侧面转动连接有丝杆133,丝杆133侧面旋合连接有与调节杆130内侧面滑动连接的调节块131,调节块131底面固定连接有与调节杆130底面滑动连接的配重块132,配重块132侧面与潜水履带底盘110侧面滑动连接,丝杆133转动可以使调节块131带动配重块132移动,犁塘机在斜坡上移动时,可以将配重块132移动到犁塘机高度较高的一侧,使犁塘机高度较高的一侧较为稳定地与地面接触,以避免犁塘机翻转,有利于犁塘机在斜坡上稳定前进。
34.两个调节杆130一端固定连接有连接框150,且两个丝杆133一端均与连接框150内侧面转动连接,丝杆133位于连接框150内的侧面固定套接有皮带轮136,且两个皮带轮136通过皮带传动连接,潜水履带底盘110一侧侧面固定连接有与相邻调节杆130另一端固定连接的动力盒180,动力盒180内部设置有动力电机,动力电机输出端与相邻丝杆133另一端传动连接,动力电机可以带动一个丝杆133转动,一个丝杆133可以通过皮带轮136带动另一个丝杆133转动,使两个丝杆133同步转动,同时调节两侧的配重块132的位置,从而进行自动调节。调节杆130两个内侧面底部均固定连接有与调节块131侧面滑动连接的限位杆135,限位杆135可以挡住调节块131底部,对调节块131进行支撑限位。
35.调节杆130顶部设置有与机体120侧面固定连接的两个气囊140与两个连通管170,两个气囊140位于两个连通管170之间,两个气囊140顶面与底面相远离一侧均与相邻连通管170一端连通,气囊140侧面设置有滚压杆141,滚压杆141移动时可以碾压气囊140,使一个气囊140内的气体通过连通管170进入另一个气囊140内部,从而根据需要使机体120前侧
或后侧的气囊140鼓起,机体120在斜坡上前进时,使远离配重块132的气囊140鼓起,配合配重块132调整犁塘机的重心位置,有利于提高调整效果,且在犁塘机前侧或后侧陷进淤泥内时,可以使配重块132远离犁塘机陷进的一侧移动,并使位于犁塘机陷进淤泥的一侧的气囊140鼓起,使犁塘机陷进淤泥的一侧可以尽可能翘起,使犁塘机脱离,有利于保证犁塘机的顺利移动。
36.机体120两个侧面均固定两个定位框160,两个气囊140位于相邻两个定位框160之间,定位框160内侧面滑动连接有滑动杆161,滚压杆141顶端与底端均通过轴杆与相邻滑动杆161内侧面转动连接,调节块131顶面固定固定连接有与调节杆130内侧面滑动连接的连接块134,连接块134顶部侧面与相邻定位框160内侧面滑动连接,且连接块134顶部侧面与相邻滑动杆161侧面固定连接,两个滚压杆141可以通过滑动杆161同步移动,使一个滚压杆141碾压一个气囊140,并使另一个滚压杆141放开另一个气囊140,有利于另一个气囊140的顺利鼓起,而连接块134可以限制滑动杆161的位置,使滑动杆161沿定位框160内部移动,同时定位框160可以对滚压杆141进行限位,使滚压杆141保持碾压气囊140,而调节块131可以通过连接块134带动滑动杆161移动,从而使滚压杆141移动,这样在调整配重块132位置时,可以同步使滚压杆141移动,使远离配重块132一侧的气囊140鼓起,便于调整的进行。
37.螺旋片221内侧面固定连接有与转动筒220侧面固定连接的若干气管222,转动筒220侧面对应若干气管222开设有若干连通槽一223,连通槽一223与相邻气管222一端连通,转动筒220内侧面转动连接有与连接架210侧面固定连接的固定筒240,固定筒240侧面底部对应若干连通槽一223开设有若干连通槽二241,连接架210侧面固定连接有与固定筒240连通的送气机构250,送气机构250可以向固定筒240内送气,转动筒220可以带动气管222转动,在连通槽一223转动到对应的连通槽二241的位置时,固定筒240内的空气可以穿过连通槽二241与连通槽一223进入气管222内,然后通过气管222移动到池塘底部,由于连通槽二241位于固定筒240底部,这样在翻动淤泥与池底泥土时,可以始终向淤泥与泥土混合部分注入空气,提高池底的含氧量,降低厌氧菌的含量,且提高池底含氧量,有利于缓解翻动池底,使池底水较为浑浊对鱼类的影响。
38.送气机构250包括浮板251,浮板251顶面固定连接有气泵253,气泵253出气端连通有与浮板251内侧面固定连接的软管252,软管252底端穿过连接架210与固定筒240一端连通,浮板251可以在水面上漂浮,气泵253可以将外界空气送入软管252内,空气可以沿软管252进入固定筒240内,从而对池底注气,可以在软管252底端连通连接管,使连接管一端与位于机体120前侧的一个气囊140连通,且将连接管连接在气囊140靠近机体120中部的一侧,并在连接管与气囊140连接的一端设置阀门,同时可以将位于机体120前侧的两个气囊140连通,这样在犁塘机整体陷入淤泥内时,可以将配重块132向机体120前侧移动,使位于机体120后侧的气囊140鼓起,然后可以打开阀门,这时软管252内的气体可以通过连接管进入位于前侧的气囊140,从而使全部气囊140鼓起,有利于减轻犁塘机重量,便于犁塘机脱离淤泥,且这时犁塘机后侧可以翘起,有利于犁塘机脱离淤泥,然后可以使配重块132向机体120后侧移动,通过滚压杆141将气囊140后半部分的气体通过连接管排出,然后可以关闭阀门,这样气泵253将不会向气囊140内充气,且可以通过重心的来回调节使犁塘机慢慢从淤泥中脱离,有利于犁塘机的顺利前进。
39.工作原理:使用时,启动潜水履带底盘110,使潜水履带底盘110带动机体120与翻
动模块200前进,启动机体120内动力机构的调节电机,降下翻动模块200,使螺旋片221与淤泥接触,同时启动驱动电机,驱动电机可以带动转动筒220转动,转动筒220可以带动螺旋片221转动,对淤泥进行翻转打散,使淤泥与池塘底的泥土混合,在犁塘机前进时,可以通过机体120内的rtk设备进行定位引导,通过rtk设备确定机体120在池塘底的位置,为机体120的前进提供导航,使犁塘机在池塘底部进行按预定规划路线自动前进;
40.在机体120前进时,可以使浮板251漂浮在水面上,机体120可以通过软管252拉动浮板251移动,可以启动气泵253,气泵253可以将外界空气吸入并送进软管252内,然后空气可以进入固定筒240内,在转动筒220转动时,可以使气管222转动,在与气管222连通的连通槽一223转动到对应的连通槽二241的位置时,固定筒240内的空气可以穿过连通槽二241与连通槽一223进入气管222内,然后通过气管222移动到池塘底部,由于连通槽二241位于固定筒240底部,这样可以始终向淤泥与泥土混合部分注入空气;
41.犁塘机在斜坡上移动时,可以启用动力电机,动力电机可以带动丝杆133转动,一个丝杆133可以通过皮带轮136带动另一个丝杆二133转动,丝杆133转动可以使调节块131移动,调节块131可以带动配重块132移动,使配重块132移动到潜水履带底盘110的前侧或后侧,调节块131可以通过连接块134带动滚压杆141移动,使一个滚压杆141向潜水履带底盘110端部移动,另一个滚压杆141向潜水履带底盘110中部移动,这时一个滚压杆141可以碾压一个气囊140,将一个气囊140内的气体挤压进连通管170内,然后进入另一个气囊140内,使另一个气囊140鼓起,即使远离配重块132一侧的气囊140鼓起,这样可以通过鼓起的气囊140与配重块132改变犁塘机的重心位置,在犁塘机上坡时,可以使配重块132向犁塘机前进方向移动,使犁塘机的重心靠近其前侧,在犁塘机下坡时,可以使配重块132背离犁塘机前进方向移动,使犁塘机的重心靠近其后侧,这样可以使犁塘机高度相对较高的一侧较为稳定的与地面接触,且在犁塘机前侧或后侧陷进淤泥内时,可以调整配重块132的位置与使背离陷入一侧的气囊140鼓起,这样可以使犁塘机陷入淤泥的一侧尽可能翘起,从淤泥中脱离。
42.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
43.以上内容仅仅是对本发明所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。