1.本发明涉及地理定位领域,尤其涉及在基于通信的交通系统中对干扰源进行地理定位的方法。
背景技术:
2.基于通信的交通系统是利用车辆(包括火车、汽车、轮船等)和轨道设备之间的远程通信来进行交通管理和基础设施控制的信号系统。典型的基于通信的交通系统是基于通信的列车控制(cbtc),其中,基于无线网络精确地知道列车的确切位置。这导致了更有效且安全的管理铁路交通的方式,从而在保持安全要求的同时实现运行车辆(列车)之间的最小车头时距(headway)和最大容量。
3.然而,在cbtc系统中,列车和路旁之间的通信在公共频带中操作。因此,在系统中使用的无线信号遭受由使用wi-fi、蓝牙等的其它装置引起的干扰。为了监测无线电质量或管理无线电资源,关于干扰源的知识是必不可少的。在一些研究中,讨论了如何在频域中解决干扰源的识别问题。然而,仍然需要在空间域中识别干扰源。换句话说,需要分析系统中干扰源的地理特性。
4.在本领域中,已经提出很少的解决方案来通过仅使用系统中车辆中的现有无线电模块来解决这种干扰源的精确地理定位的问题。
技术实现要素:
5.就此而言,根据本发明的一个方面,提供了一种用于在基于通信的交通系统中对干扰源进行地理定位的方法,其中,所述基于通信的交通系统包括:
[0006]-多个干扰源,多个干扰源分布在空间内并分别发射信号,
[0007]-车辆,车辆沿着已知轨迹移动,接收来自所述干扰源的信号,并且在一个时刻测量仅一个干扰源的信号的信号强度。
[0008]
所述方法包括以下步骤:
[0009]-通过用聚类方法对所测量的信号的信号强度进行聚类来分离所述干扰源;
[0010]-基于经分离的所述干扰源估计所述空间中的所述干扰源的位置。
[0011]
利用这种布置,本发明可以基于功率测量来识别干扰位置,而不会给当前系统无线电硬件增加任何复杂性。
[0012]
在一个实施方式中,所述基于通信的交通系统是基于通信的列车控制(cbtc)系统,并且所述车辆是列车。另选地,所述基于通信的交通系统也可以是用于汽车、轮船等的基于通信的交通系统,其中,所述车辆沿着已知轨迹行进并且接收用于交通管理的无线电信号。
[0013]
另外,已知轨迹例如包括至少一个车辆的已知位置、速度和方向。
[0014]
此外,优选地,仅一个干扰源发射信号,从而避免干扰源之间的冲突。另选地,随机激活所述干扰源。
[0015]
优选地,系统使用csma/ca或csma/cd协议并且干扰源使用csma/ca或csma/cd协议发射信号,然而也可以使用其它电信协议。
[0016]
另选地,迭代地应用分离所述干扰源的步骤和估计所述干扰源的位置的步骤。作为示例,分离所述干扰源的步骤使用k均值聚类方法,并且估计所述干扰源的位置的步骤使用最大似然估计。
[0017]
另选地,顺序地应用分离所述干扰源的步骤和估计所述干扰源的位置的步骤。作为示例,其中分离所述干扰源的步骤使用联合贝叶斯聚类方法,并且估计所述干扰源的位置的步骤使用最大后验概率(map)估计。
[0018]
当应用顺序方法时,从干扰源的先前已知知识逐步地应用分离所述干扰源的步骤。
[0019]
在这种情况下,通过使用顺序方法,根据本发明的方法还可以包括以下步骤:
[0020]-将信号强度的测量在几何上分成连续的簇;
[0021]-估计一个簇中的干扰源的位置;
[0022]-将所述簇中的干扰源的估计位置用作连续的簇中的另一簇的先验知识;以及
[0023]-从相邻者到另一相邻者过滤显著干扰源。
[0024]
就此而言,可以减少计算复杂性,同时仍然在一个行程中获得精确的地理位置。
[0025]
另选地,通过使用顺序方法,对于车辆具有沿着已知轨迹的多个行程的情况,根据本发明的方法还可以包括以下步骤:
[0026]-估计所述干扰源在一个行程中的位置;
[0027]-利用所述干扰源在所述行程中的估计位置作为其它行程的先验知识。
[0028]
就此而言,可以使用所述干扰源在一个行程中的估计位置来估计所述干扰源在其它行程中的位置。
[0029]
根据本发明的另一方面,还提供了一种用于对干扰源进行地理定位的基于通信的交通系统,其中,所述基于通信的交通系统包括:
[0030]-多个干扰源(k),多个干扰源分布在空间内并分别发射信号,
[0031]-车辆,该车辆沿着已知轨迹移动并具有无线电模块,该无线电模块能够接收来自所述干扰源的信号,并且在一个时刻测量仅一个干扰源的信号的信号强度;
[0032]
控制器,该控制器被配置为:
[0033]-借助于所测量的信号的信号强度分离所述干扰源;
[0034]-借助于经分离的干扰源估计所述干扰源在所述空间中的位置。
[0035]
根据本发明的又一方面,还提供了一种计算机程序,该计算机程序包括将由处理器执行的程序代码,当由所述处理器执行时,所述程序代码适于执行根据本发明的上述方法。
[0036]
在这种情况下,本发明通过仅使用列车上的现有无线电模块来解决空间识别干扰的问题。换句话说,cbtc的无线电装置测量干扰功率,然后基于距离-功率关系和移动采样机制,可以对干扰源进行地理定位。然而,挑战在于估计干扰的随机性以及它们之间的混合行为。
[0037]
本发明的其它特征和优点将在以下参考附图的描述中显现。
附图说明
[0038]
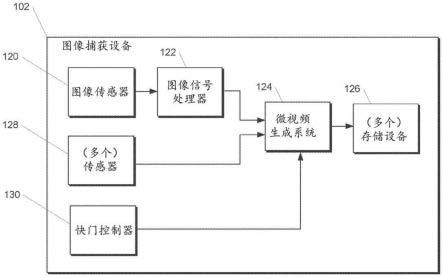
图1示出了根据本发明的示例性基于通信的列车系统。
[0039]
图2示出了根据本发明的基于通信的列车系统的示例性局部坐标系。
[0040]
图3示出了用于描述k均值聚类算法的伪代码的示例。
[0041]
图4示出了根据本发明的用于描述第一解决方案的伪代码的示例。
[0042]
图5示出了根据本发明的用于描述第二解决方案的伪代码的示例。
[0043]
图6示出了在根据本发明的示例性实施方式的顺序方法中相关的簇和行程。
具体实施方式
[0044]
图1示出了根据本发明的示例性的基于通信的列车系统。在该示例性系统中,列车ta沿方向d以v m/s的速度沿着轨道tr行进,经过轨道tr上的不同位置,例如位置t1、t2、t3、t4。在系统中,还存在数个干扰源,例如图1中所示的s1、s2和s3,这些干扰源发射干扰信号,因此需要在地理上进行识别,以避免这些干扰源的信号干扰。
[0045]
在系统中,列车ta具有无线电装置(radio),该无线电装置能够在其移动期间以每秒r次的速率接收并测量信号,例如由干扰信号发射的信号。以db为单位的路径损耗是a b.logd,其中,d是接收器和发送器(tx-rx)距离,a和b表示路径损耗系数。另外,两个不同位置(例如位置t1和位置t2)之间的遮蔽(shadowing)如下与系数相关:ρ_0e^(-(|δx|)/d_c),其中,d_c和ρ_0表示遮蔽系数,δx是列车位置差。
[0046]
干扰源s1、s2和s3位于不同的位置,随机干扰列车的无线电装置。在本发明中,从一个测量到另一个测量,干扰源被随机激活。作为示例,在本发明中使用csma/ca,并且在彼此接近的干扰源之间执行csma/ca,因此满足非竞争条件。
[0047]
在这种情况下,在本实施方式中,测量在一个时刻仅属于一个源。然而,干扰源可以随机地彼此切换,这使得观测成为混合信号。另外,由于数据流量模型,干扰出现也是随机的。因此,本发明如下通过两个主要步骤解决地理定位问题:
[0048]
源分离:由于观测值可以随机地属于干扰源之一,因此需要识别测量值所属的干扰源。
[0049]
位置估计:一旦观测被分离,就可以估计干扰源的位置,从而进行地理定位。
[0050]
这两个步骤是联合依赖的,一个的解影响另一个。
[0051]
图2示出了根据本发明的系统的上述示例性实施方式的局部2d坐标系,其具有x轴和y轴,其中,干扰源s1、s2、s3
…
具有坐标为[(x1,y1)(x2,y2)...(xk,yk)]的位置θ=[θ1,θ2,...,θk],即,θ=[θ1,θ2,...,θk]=[(x1,y1)(x2,y2)...(xk,yk)],其是本发明的输出。另外,在坐标系中,列车在其轨道上沿x轴的位置表示为t,并且t=[t1,..,tn,..,tn]。此外,干扰源和列车之间的距离在图2中被表示为d1、d2、d3
…
。应当注意,坐标系仅仅是为了说明的目的,也可以应用其它格式,例如1d或3d。
[0052]
在本发明的上下文中,还定义了以下参数:
[0053]-列车的无线电装置测量的干扰功率为z=[z1,..,zn,..,zn]
[0054]-定义指示在每个时刻哪个干扰源正在发射的隐藏变量v=[v1,..,vn,..,vn]。这不是必要的,但便于进行要在以下段落讨论的方法。
[0055]-将θ的空间离散化为在本发明中,使用离散的位置集合来数字地实施根据本
发明的方法。
[0056]-针对中的所有θ定义位置测量相关性
[0057]zn
=μn wn,
[0058]
其中,μn借助于预定义的函数从tn和θ获得,例如μn=a blog||t
n-θ||;并且其中wn是观测噪声(由于传播信道中的遮蔽)。
[0059]-可选地定义干扰源的测量相关性
[0060][0061]
其中,
[0062]
这种相关性主要是由于移动的装置的两个所考虑的位置tm和tn之间的遮蔽相关性。在对数域中,遮蔽通常是高斯的。这是可选的,因为在某些系统中可能不存在相关性。
[0063]
如上所述,本发明涉及两个主要步骤,即源分离和位置估计。作为示例,如下提出两种示例性数学方法:
[0064]-迭代方法:该方法迭代地操作以按照以下方式实现两个步骤:
[0065]-源分离:应用k均值聚类方法。v是通过使从测量到均值的距离最小化来计算的。
[0066]-位置估计:通过具有分类向量v,通过最大似然估计得到干扰源的位置θ。
[0067]-顺序方法:通过利用贝叶斯推理,通过一个接一个的测量逐步地求解源分离问题。然后采用最大后验概率(map)估计来获得干扰源的位置。
[0068]
以下各段落将进一步讨论这两种方法。在此之前,如下建立了实现这两个主要步骤的模型:
[0069]-非重叠条件:在本实施方式中,假设干扰源之间不存在冲突。这意味着在一个时刻,只有一个干扰源发射信号。例如,可以通过使用csma/ca协议或csma/cd来满足该条件。
[0070]-已知列车轨迹:在任何时刻,列车都知道它的位置、速度和方向。
[0071]-应用如图2所示的局部坐标系的局部坐标系。
[0072]-在时间n列车与干扰源k之间的距离:
[0073][0074]-如果干扰源k在时间n是活动的,则列车上的干扰接收功率
[0075]zn
=a blogd
n;k
w
n;k
,
ꢀꢀꢀꢀ
(2)
[0076]
其中,a和b是路径损耗模型的两个系数,并且w
n;k
表示在时间n相对于干扰源k在列车上的遮蔽衰弱。
[0077]-遮蔽衰弱遵循具有两个列车位置tn和tm之间的相关性的多元高斯分布,表示为
[0078][0079]
其中,d
c-ρo是遮蔽模型的系数(也已知)。
[0080]-假设路径损耗和遮蔽模型是已知的。
[0081]-假设存在k个干扰源,因此要估计的参数是它们的位置:
[0082]
θ=[θ1,..,θk,..,θk]。
ꢀꢀꢀꢀꢀꢀꢀ
(4)
[0083]-在列车上,无线电模块测量从时刻1到n的干扰功率电平,观测向量可以写为
[0084]
z=[z1,..,zn,..,zn]。
ꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0085]
在本发明中,不知道在任意时刻k个干扰源中哪个干扰源是活动的。从这个意义上讲,观测在各个源之间是混合的。考虑到非重叠条件,假设在一个时刻只有一个源正在发射。换句话说,当列车测量信号时,该信号属于仅一个干扰源。这是为了避免更复杂的情况:其中多个干扰源同时发射信号,并且当列车测量时,其测量这些信号的组合。
[0086]-引入以下隐藏变量,以便指示在时间n激活了哪个源。
[0087]
v=[v1,..,vn,..,vn],
[0088]
在此模型的基础上,现在讨论两种方法,即迭代方法和顺序方法。
[0089]-迭代方法:k均值聚类 最大似然位置估计
[0090]
为了分离干扰源,应用k均值聚类算法作为一种简单有效的方法。由于路径损耗模型是可用的,所以当列车处于tn时,从源k接收的功率集中在μ
n;k
=a blogd
n;k
。k均值算法的目标是使观测与均值点之间的距离最小化,其表示为
[0091][0092]
k均值聚类算法可以用图3所示的伪代码来描述。
[0093]-顺序方法:联合贝叶斯聚类与位置估计
[0094]
在顺序方法中,在时刻n,需要基于n-1先前估计的结果来识别哪个源正在发射。由于这个目的,贝叶斯方法表示为
[0095][0096]
在没有关于时刻n的先验p(vn|v
1:n-1
,z
1:n-1
)的知识情况下,我们假设其服从均匀分布。如下针对vn的每个可能性计算似然度p(zn|v
1:n-1
,z
1:n-1
,vn):
[0097][0098]
通过认为一旦人们在时刻n知道第k源正在干扰则观测zn的似然度仅取决于分配给第k源的先前观测而得到该表达式。如在遮蔽模型中看到的,z
1:n;k
是多元高斯随机变量,因此条件概率p(z
n;k
|z
1:n-1;k
,θk)是具有均值的高斯,并且变量表示为
[0099][0100]
其中,μ
n;k
表示源k在时间n的均值,
[0101]
∑
n|1:n-1;k
表示源k的在时间n和时间1:n-1之间的相关矩阵,
[0102]
∑
1:n-1;k
表示源k的时间1:n-1的自相关矩阵,
[0103]
μ
1:n-1;k
表示源k的在时间1:n-1的均值,
[0104]
∑
1:n-1|n;k
表示源k的在时间1:n-1和时间n之间的相关矩阵。
[0105]
聚类决策表示为:
[0106][0107]
时刻n的后验被计算为:
[0108][0109]
该后验作用类似于下一时刻n 1的先验,并且假定最初的先验p(θk|z
0;k
)是一致的。
[0110]
在最后的观测中,源的位置由最大后验(map)估计器估计为
[0111][0112]
在该算法的基础上,可以数值地实现以下两个解:
[0113]-解1:
[0114]
为了在数值上实现上述算法,离散化θ的空间。
[0115]
第一种解是同时处理所有n个观测。在这种情况下,离散化需要精细以获得良好的精度。因此,需要高计算复杂性和存储器。
[0116]
特别地,该第一解可以由图4所示的伪代码来描述。
[0117]-解2:
[0118]
另选地,当使用顺序方法时,不需要同时处理数据。实际上,可以将数据分割成更小的样本,放松离散化,然后通过顺序聚类逐渐提高精度。在保证低复杂度的同时保持良好精度的意义上,该方法更适应于a)小节中的算法。因此,在可缩放性方面,如果我们进一步希望考虑更多的观测结果,则划分数据更合适。
[0119]
第二种解可以用图5所示的伪代码来描述。
[0120]
此外,顺序方法中的这些方法允许能够考虑来自其它列车行程或来自数据库的关于干扰源位置的先验知识,如图6所示,其中沿着轨道tr存在两个列车行程1和2受到来自相同干扰源s1、s2、s3、
…
、s8的干扰。在开始时,如果关于干扰源的知识不可用,则将施加均匀概率。一旦给出列车行程的知识,则考虑以下两种数据处理可能性:
[0121]
1.批处理:所有数据处理一次,输出是θ的后验概率。该后验作用类似于其它行程
的先验。
[0122]
2.数据划分:测量可以几何地划分为连续的簇,例如行程1中的c11
…
c16和行程2中的c21...c26。然后,前一簇的后验被视为当前簇的先验,例如c11是c12的先验,c12是c13的先验。该方法允许θ以以下两种方式向下选择,以便在保持精度的同时降低计算复杂度:
[0123]
a.先验概率不大的一些θ将被消除。剩余的集合被更精细地量化。
[0124]
b.通过知道测量的距离依赖性,可以确定簇的显著干扰区。例如,如图6所示,为簇c11确定区域1并且区域1覆盖显著干扰源s1、s2和s3,并且为簇c12确定区域2并且区域2覆盖显著干扰源s2、s3和s4。从该信息中,可以消除位于该区域之外的先验的一些θ,例如,在区域2中,消除干扰源s1。
[0125]
因此,优选找到允许频繁更新干扰源位置的估计的实现方式,而不是收集若干列车行程的所有位置的所有测量值并将其作为整体进行处理。
[0126]
其目的是利用簇的干扰源估计。该估计从一个簇到下一个簇是相关的,因此,如图6所示,一个簇c11的估计结果对于一个行程中的下一个簇c12等是有用的。等效地,对于多个行程,当处理与第二列车行程(行程2)的簇c22相关联的观测时,(在当前列车行程期间更新的)先前簇c21的信息和在先前列车行程(行程1)中针对当前簇和先前簇c11和c12已经进行的估计作为估计的先验信息而有用。
[0127]
总之,在上述示例性的基于通信的列车控制系统中,当列车沿着已知轨迹行进时,列车上的无线电装置观测信道并测量来自每个位置处的干扰源的干扰功率电平,其中,干扰强度取决于列车干扰源距离,因此移动的列车允许几何地采样干扰的信号强度,从而允许估计干扰源的位置。
[0128]
在这点上,本发明可以仅基于系统中无线电硬件的功率测量来估计基于通信的交通系统中干扰源的空间特性,以便对干扰源进行地理定位,而不给系统中的当前无线电硬件增加任何复杂性。
[0129]
此外,本领域技术人员已知,可以以多种方式实现根据本发明的前述示例性解决方案,诸如由处理器执行的程序指令、软件模块、微码、计算机可读介质上的计算机程序产品、逻辑电路、专用集成电路、固件等。本发明的实施方式可以采取完全硬件实施方式、完全软件实施方式或包含硬件和软件元素两者的实施方式的形式。在优选实施方式中,本发明以软件实现,软件包括但不限于固件、驻留软件、微代码等。
[0130]
此外,本发明的实施方式可以采取可从计算机可用或计算机可读介质访问的计算机程序产品的形式,该介质提供供计算机、处理设备或任何指令执行系统使用或与其结合使用的程序代码。出于本说明书的目的,计算机可用或计算机可读介质可以是能够包含、存储、通信或传输程序以供指令执行系统、设备或装置使用或与之结合使用的任何设备。介质可以是电子、磁性、光学或半导体系统(或设备或装置)。计算机可读介质的示例包括但不限于半导体或固态存储器、磁带、可移除计算机软盘、ram、只读存储器(rom)、刚性磁盘、光盘等。光盘的当前示例包括光盘只读存储器(cd-rom)、光盘读/写(cd-r/w)和dvd。
[0131]
上述实施方式是本发明的说明。在不离开源自所附权利要求的本发明的范围的情况下,可以对它们进行各种修改。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。