1.本发明涉及电机控制技术领域,尤其涉及一种交流电机转子磁链的观测方法。
背景技术:
2.随着科技的进步,工业应用现场对电机传动系统的速度及转矩响应均有了更高的要求,矢量控制技术由于其优异的性能,也受到电机控制领域的广泛关注。
3.异步电机在进行磁场定向控制(foc)时,常使用转子磁链定向,进行转子的有功无功解耦,实现高性能控制。转子磁链定向,首先要得到异步电机的转子磁链,常用的异步电机转子磁链观测器分为两种,一种是基于电流模型的转子磁链观测器,一种是基于电压模型的转子磁链观测器。
4.传统有感矢量控制由于需要安装编码器,使系统的成本上升,同时在一些高震动及大油污强电磁环境条件下难以保证编码器可靠性,因此无速度传感器矢量控制研究也成为当下的热点。实现无感矢量其关键点在于获取准确的电机磁链位置,目前大多利用逆变器输出电压、电流结合电机模型去估算转子磁链。
5.以异步电机为例,传统电压型转子磁链计算方法包含积分环节,由于变频器系统中电压电流采样电路中存在高频噪声甚至直流偏置,使得使用积分计算存在偏移问题,无法在工程应用中直接使用,对此学者提出使用低通滤波环节代替积分环节,或加入高通滤波器,使用此类方法虽可避免积分偏移问题,但同时也引入了相位偏移,相位补偿等新问题,尤其对于变频器宽范围的运行频率区间,使得滤波器的截止频率选取及相位补偿量的确定都需要更多的参数参与计算,使此类方法在应用中有参数多且参数变化范围大等缺点。
技术实现要素:
6.本发明实施例的目的是提供一种交流电机转子磁链的观测方法,解决了传统的电压型磁链计算模型存在积分偏移问题。
7.为了实现上述目的,本发明实施例提供了一种交流电机转子磁链的观测方法,该方法包括:
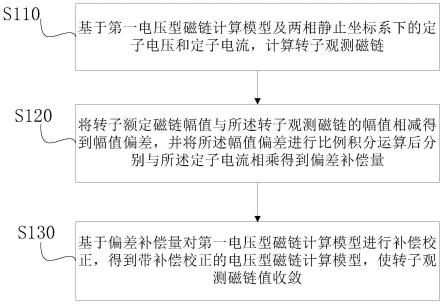
8.基于第一电压型磁链计算模型及两相静止坐标系下的定子电压和定子电流,计算转子观测磁链;
9.将转子额定磁链幅值与转子观测磁链的幅值相减得到幅值偏差,并将幅值偏差进行比例积分运算后分别与定子电流相乘得到偏差补偿量;
10.基于偏差补偿量对第一电压型磁链计算模型进行补偿校正,得到带补偿校正的电压型磁链计算模型,使转子观测磁链值收敛。
11.本发明具有以下的有益效果:本发明通过在传统电压型磁链计算模型的基础上,串入校正环节,使转子观测磁链向转子给定磁链收敛,最终实现准确的磁链位置观测,有效避免积分偏移问题,且实现过程简单便于在工程应用中实现。
附图说明
12.图1表示本发明实施例提供的交流电机转子磁链的观测方法的步骤流程图;
13.图2表示本发明实施例提供的计算幅值偏差的步骤流程图;
14.图3表示本发明实施例提供的交流电机转子磁链的观测系统的结构框架图;
15.图4为本发明实施例提供的传统电压型磁链观测模型收敛前的仿真图;
16.图5为本发明实施例提供的带补偿校正的电压型磁链观测模型收敛后的仿真图。
具体实施方式
17.为使本发明的目的、技术方案和优点更加清楚明白,下面结合具体实施方式并参照附图,对本发明实施例进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避混淆本发明的概念。
18.实施例一
19.图1表示本发明实施例提供的交流电机转子磁链的观测方法的步骤流程图,参照图1,本发明实施例提供一种交流电机转子磁链的观测方法,该方法包括:
20.步骤s110,基于第一电压型磁链计算模型及两相静止坐标系下的定子电压和定子电流,计算转子观测磁链;
21.步骤s120,将转子额定磁链幅值与转子观测磁链的幅值相减得到幅值偏差,并将幅值偏差进行比例积分运算后分别与定子电流相乘得到偏差补偿量;
22.步骤s130,基于偏差补偿量对第一电压型磁链计算模型进行补偿校正,得到带补偿校正的电压型磁链计算模型,使转子观测磁链值收敛。
23.在一可选实施例中,在计算转子观测磁链之前,还包括:
24.将采集到的定子电流进行坐标变换,得到两相静止坐标系下α、β轴的定子电流,并将变频器输出的指令电压进行坐标变换得到两相静止坐标系下α、β轴的定子电压。
25.在一可选实施例中,通过下式(1)进行坐标变换得到两相静止坐标系下α、β轴的定子电流:
[0026][0027]
其中,iu表示电机u相电流,iv表示电机v相电流,i
sα
表示α轴的定子电流,i
sβ
表示β轴的定子电流。
[0028]
在一可选实施例中,通过下式(2)进行坐标变换得到两相静止坐标系下α、β轴的定子电压:
[0029][0030]
其中,ud表示d轴指令电压,uq表示q轴指令电压,u
sα
表示α轴的定子电压,u
sβ
表示β轴的定子电压。
[0031]usα
,u
sβ
可通过输出电压采样经坐标变换获得,更进一步工程上可使用变频器输出的指令电压代替。
[0032]
图2表示本发明实施例提供的计算幅值偏差的步骤流程图,参照图2,本发明实施例提供一种交流电机转子磁链的观测方法,在一可选实施例中,计算幅值偏差,包括:
[0033]
步骤s100,基于转子观测磁链,计算两相静止坐标系下α、β轴的转子观测磁链幅值;
[0034]
步骤s200,将转子额定磁链幅值与转子观测磁链幅值相减得到幅值偏差。
[0035]
在一可选实施例中,通过下式(4)计算转子观测磁链幅值及幅值偏差:
[0036][0037]
其中,代表转子观测磁链幅值,ψ
rα
、ψ
rβ
为两相静止坐标系下的转子观测磁链,e代表幅值偏差,ψr代表转子额定磁链幅值。
[0038]
在一可选实施例中,通过下式(5)计算偏差补偿量:
[0039][0040][0041]
其中,pi(e)表示幅值偏差经pi比例积分运算,k
p
表示比例增益,ki表示积分增益,η
α
(e)表示α轴的偏差补偿量,η
β
(e)表示β轴的偏差补偿量。偏差补偿量为观测磁链偏差经pi比例积分运算后分别与i
sα
和i
sβ
相乘得到η
α
(e)和η
β
(e)偏差补偿量。
[0042]
在一可选实施例中,带补偿校正的电压型磁链计算模型为:
[0043][0044]
其中,ψ
rα
,ψ
rβ
为两相静止坐标系下的转子观测磁链,u
sα
,u
sβ
为两相静止坐标系下的定子电压,i
sα
,i
sβ
为两相静止坐标系下的定子电流,ls,lr,lm,rs分别表示定子电感,转子电感,互感以及定子电阻,为电机漏磁系数。
[0045]
已知,由电机定子电压方程和磁链方程可得传统计算转子磁链的电压模型:
[0046][0047]
在一可选实施例中,转子额定磁链幅值由变频器电机参数计算获取。
[0048][0049]us
为电机额定电压,is为电机额定电流,ls为定子电感,f为电机额定频率,ψr为转
子额定磁链幅值。
[0050]
本发明通过在传统电压型磁链计算模型的基础上,串入校正环节,使观测磁链向给定磁链收敛,最终实现准确的磁链位置观测,有效避免积分偏移问题,且实现过程简单便于在工程应用中实现。
[0051]
本发明通过对观测的α、β轴磁链求幅值(公式4)得到观测磁链幅值,将观测磁链幅值与给定磁链幅值ψr相减,得到观测磁链幅值偏差e,在对此偏差进行pi比例积分运算(公式5),将其运算结果与当前电流值相乘(公式6)得到αβ轴的积分补偿值,最终结合传统电压型转子磁链计算方法,对积分环节进行补偿校正可得到(公式7),形成带补偿校正的积分环节,可有效避免纯积分的上述缺点,从而实现对转子磁链的准确观测。
[0052]
图4表示传统电压型磁链观测模型收敛前的仿真图。
[0053]
图5为本发明实施例提供的带补偿校正的电压型磁链观测模型收敛后的仿真图。
[0054]
图4、图5中,x轴表示时间,y轴表示转子磁链值,ch1表示转子额定磁链幅值,ch2表示转子观测磁链幅值,ch3表示α轴磁链观测值,ch4表示β轴磁链观测值。
[0055]
下面以7.5kw三相异步电机为例,图4为使用传统电压型磁链观测模型的观测结果,如图4表示转子额定磁链幅值和观测磁链幅值震荡,观测结果随时间偏移。
[0056]
图5表示转子额定磁链幅值和观测磁链幅值,在0.1秒内实现快速收敛。
[0057]
实施例二
[0058]
在一可选实施例中,在计算完转子观测磁链幅值后对转子观测磁链幅值进行低通滤波得到ψ
′r,使用ψ
′r代替转子额定磁链幅值ψr,可避免实际转子观测磁链幅值与转子额定磁链幅值存在稳态偏差使转子观测磁链幅值在转子额定磁链幅值附近震荡,进一步提高磁链观测器的稳定性。通过下式(9)对转子观测磁链幅值进行低通滤波:
[0059][0060]
其中,lpf代表低通滤波器,截止频率取电机额定频率f的1/10。
[0061]
实施例三
[0062]
图3表示本发明实施例提供的交流电机转子磁链的观测系统的结构框架图,参照图3,本发明实施例提供一种交流电机转子磁链的观测系统,该系统包括:
[0063]
计算模块,用于基于第一电压型磁链计算模型及两相静止坐标系下的定子电压和定子电流,计算转子观测磁链;
[0064]
补偿模块,用于将转子额定磁链幅值与转子观测磁链的幅值相减得到幅值偏差,并将幅值偏差进行比例积分运算后分别与定子电流相乘得到偏差补偿量;
[0065]
收敛模块,用于基于偏差补偿量对第一电压型磁链计算模型进行补偿校正,得到带补偿校正的电压型磁链计算模型,使转子观测磁链值收敛。
[0066]
在一可选实施例中,计算模块在计算转子观测磁链之前,还用于将采集到的定子电流进行坐标变换,得到两相静止坐标系下α、β轴的定子电流,并将变频器输出的指令电压进行坐标变换得到两相静止坐标系下α、β轴的定子电压。
[0067]
在一可选实施例中,计算模块,用于通过下式(1)进行坐标变换得到两相静止坐标系下α、β轴的定子电流:
[0068][0069]
其中,iu表示电机u相电流,iv表示电机v相电流,i
sα
表示α轴的定子电流,i
sβ
表示β轴的定子电流。
[0070]isα
,i
sβ
通过变频器uv相电流采样经坐标变换获得。
[0071]
在一可选实施例中,计算模块,用于通过下式(2)进行坐标变换得到两相静止坐标系下α、β轴的定子电压:
[0072][0073]
其中,ud表示d轴指令电压,uq表示q轴指令电压,u
sα
表示α轴的定子电压,u
sβ
表示β轴的定子电压。
[0074]
在一可选实施例中,补偿模块,用于基于转子观测磁链,计算两相静止坐标系下α、β轴的转子观测磁链幅值;还用于将转子额定磁链幅值与转子观测磁链幅值相减得到幅值偏差。
[0075]
在一可选实施例中,补偿模块,用于通过下式(4)计算转子观测磁链幅值及幅值偏差:
[0076][0077]
其中,代表转子观测磁链幅值,ψ
rα
、ψ
rβ
为两相静止坐标系下的转子观测磁链,e代表幅值偏差,ψr代表转子额定磁链幅值。补偿模块通过对ψ
rα
,ψ
rβ
求平方和在开方获得转子观测磁链幅值。
[0078]
在一可选实施例中,补偿模块,用于通过下式(5)计算偏差补偿量:
[0079][0080][0081]
其中,pi(e)表示幅值偏差经pi比例积分运算,k
p
表示比例增益,ki表示积分增益,η
α
(e)表示α轴的偏差补偿量,η
β
(e)表示β轴的偏差补偿量。
[0082]
在一可选实施例中,带补偿校正的电压型磁链计算模型为:
[0083][0084]
其中,ψ
rα
,ψ
rβ
为两相静止坐标系下的转子观测磁链,u
sα
,u
sβ
为两相静止坐标系下的定子电压,i
sα
,i
sβ
为两相静止坐标系下的定子电流,ls,lr,lm,rs分别表示定子电感,转子电
感,互感以及定子电阻,为电机漏磁系数。
[0085]
已知,由电机定子电压方程和磁链方程可得传统计算转子磁链的电压模型:
[0086][0087]
在一可选实施例中,转子额定磁链幅值由电机参数计算获取。
[0088][0089]us
为电机额定电压,is为电机额定电流,ls为定子电感,f为电机额定频率,ψr为转子额定磁链幅值。
[0090]
本发明通过在传统电压型磁链计算模型的基础上,串入校正环节,使观测磁链向给定磁链收敛,最终实现准确的磁链位置观测,有效避免积分偏移问题,且实现过程简单便于在工程应用中实现。
[0091]
实施例四
[0092]
在一可选实施例中,在计算完转子观测磁链幅值后对转子观测磁链幅值进行低通滤波得到ψ
′r,使用ψ
′r代替转子额定磁链幅值ψr,可避免实际转子观测磁链幅值与转子额定磁链幅值存在稳态偏差使转子观测磁链幅值在转子额定磁链幅值附近震荡,进一步提高磁链观测器的稳定性。通过下式(9)对转子观测磁链幅值进行低通滤波:
[0093][0094]
其中,lpf代表低通滤波器,截止频率取电机额定频率f的1/10。
[0095]
应当理解的是,本发明的上述具体实施方式仅仅用于示例性说明或解释本发明的原理,而不构成对本发明的限制。因此,在不偏离本发明的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。此外,本发明所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。