1.本发明属于医疗器械技术领域,具体涉及一种多功能手部康复机器人。
背景技术:
2.手部康复机器人是用于手部功能损伤患者在术后、社区康复或者居家康复时使用的康复机器人,根据穿戴形式可分为末端牵引式与外骨骼式,根据驱动形式可分为电机驱动、气动驱动等。目前市场上较成熟的产品为气动康复手套、刚性手部康复外骨骼机器人、手关节持续被动活动仪等。其主要目的是促进患者手部功能重建、同时促进患者认知功能、本体感觉恢复,减轻医师负担。
3.但目前市场上的手部康复机器人存在以下缺点:
4.1、现有四指康复装置的每一个手指均需要单独的一个动力源进行驱动,手腕康复装置的每一个自由度均需要一个动力源进行驱动,占用空间大,成本较高,很难做到同时实现手腕的屈曲伸展、内收外展、内旋外旋,手指的弯曲等自由度的功能,且使用者舒适感欠佳。
5.2、现在技术中手部机器人以功能角度开展设计,在一定程度上忽略了康复需求,如:手指功能障碍患者大多存在痉挛、爪形手畸形等现象,即初始状态多为“屈曲”,现有装置大多强调可以驱动四指由“自然位”运动到“完全屈曲”的位置,而实际上患者需要的是打开关节活动度,通过运动训练等方式恢复到“自然位”状态;现有技术中采用手指穿戴式的康复机构,手背上设置有带动手指展开弯曲的动力源,无法根据患者的爪形手畸形等“弯曲”状态实现舒适的康复训练,从而无法实现患者需要的真正康复训练。
技术实现要素:
6.本发明的目的在于针对现有技术不足,提供了一种以患者手部真正需要的康复为基础、可同时实现四指、腕部多自由度训练的多功能手部康复机器人。
7.本发明解决其技术问题所采用的技术方案是:一种多功能手部康复机器人,包括安装在康复平台上的转盘、安装在所述转盘上用于患者进行四指康复训练的四指康复装置和用于患者手腕进行康复训练的手腕康复装置;
8.所述四指康复装置包括安装在所述转盘上的四指驱动电机、与所述四指驱动电机的输出轴同轴设置的凸轮、安装在所述转盘上的康复支架上且与所述凸轮抵接的四组手指机构;患者手指套设在所述四指康复装置上时,所述凸轮位于患者手心的一侧。
9.进一步地,所述手指机构包括通过直线轴承滑动安装在所述康复支架上的移动柱、安装在所述移动柱底端的手指滚珠、转动安装在所述移动柱顶端的滑轮以及套设在所述直线轴承的外侧且设置在所述康复支架与所述移动柱的底端之间的压缩弹簧;所述手指滚珠与所述凸轮滚动连接。
10.进一步地,还包括设置在所述康复支架外侧的支撑壳体,所述移动柱穿出所述康复支架、支撑壳体的上端面且与所述直线轴承、支撑壳体转动安装。
11.进一步地,所述移动柱的顶端设置有用于套设患者手指的绑带。
12.进一步地,所述支撑壳体的上端面设置有用于支撑患者腕部的支撑座,所述支撑座上设置有用于稳固患者腕部的固定带。
13.进一步地,所述手腕康复装置包括安装在所述转盘上的腕部驱动电机、与所述腕部驱动电机的输出轴垂直固定设置的长度调节机构、与所述长度调节机构的输出端垂直固定安装的第一转轴以及与所述第一转轴竖直方向垂直固定连接的方形架;所述第一转轴上套设有第一握把套,所述方形架远离所述第一转轴连接处的竖直杆上套设有第二握把套,所述方形架的中间竖直杆上套设有第三握把套;所述长度调节机构的轴线与所述腕部驱动电机的输出轴轴线在水平面上相互垂直,所述第一转轴的轴线与所述长度调节机构的轴线在水平面上相互垂直。
14.进一步地,所述长度调节机构包括与所述腕部驱动电机的输出轴同轴固定设置的连接块和滑动设置在所述连接块上的滑动杆;所述滑动杆与所述第一转轴固定连接。
15.进一步地,所述转盘包括下底盘、安装在所述下底盘上的多个滚动滚珠以及套设在所述下底盘上的上端盖;所述上端盖与所述滚动滚珠转动连接;
16.所述上端盖上安装有手动卡扣,所述手动卡扣包括设置在所述转盘内部的按扣安装架、活动安装在所述按扣安装架上且一端伸出所述转盘的上端盖的滚花按扣、开设在所述按扣安装架上且与所述滚花按扣另一端配合的倾斜槽,活动安装在所述倾斜槽对应的按扣安装架上的卡扣插销以及与所述卡扣插销对应安装在所述按扣安装架上的卡扣弹簧。
17.进一步地,与所述卡扣插销对应的所述下底盘上的垂直板上开设有与所述卡扣插销配合的若干插销孔;当按压所述手动卡扣的滚花按扣时,所述卡扣插销从所述插销孔中脱出;当松开所述滚花按扣时,所述卡扣插销弹出到对应的插销孔中。
18.更进一步地,所述康复平台上设置有用于调节所述转盘位置的位置调节机构,所述位置调节机构包括沿x轴方向设置的调节导轨和与所述调节导轨配合滑动连接的调节滑块;所述转盘的下底盘与所述调节滑块固定连接。
19.本发明的一种多功能手部康复机器人的有益效果是:
20.1、本发明的四指康复装置采用一个动力源实现四根手指的同时康复训练,节省成本,同时动力源在手心的一侧,在进行康复训练时,通过手指机构从手心一侧对患者的手部施加力,改变了现有手部康复装置将患者的手指从伸直状态牵引运动到“完全屈曲”的位置的单一康复训练的固定思维模式,打开关节活动度,通过运动训练等方式恢复到“自然位”状态,实现手功能障碍患者四指从“屈曲”到“伸展”的训练,同时对于手部屈曲动作困难的患者,通过绑带束缚实现屈曲运动的训练。本发明既适用于初始为“屈曲”状态的手指康复又适用于初始状态为伸直状态的手指康复。
21.2、本发明将手指康复与手腕康复训练功能结合,同时设置有转盘和调节机构能够实现患者左手康复与右手康复的互换。降低成本、适用性较广。本发明的手指康复装置还设置有长度调节机构,可以根据患者的实际使用要求进行调节,适用不同手部尺寸患者的康复训练。本发明手指机构的移动柱与康复支架和直线轴承均转动安装,能够适应四指康复过程中收展角度的变化,保证康复训练过程中患者手部的舒适性。
22.3、本发明的手腕康复训练装置同样采用单一动力源,通过一体化握把与转盘的组合设计,通过手部的三种抓握形式,实现手腕屈曲伸展、内收外展、内旋外旋三自由度的主
动与被动训练模式,同时结构简单,转盘、位置调节机构、一体化握把的组合设计,实现患者不改变自身的位置,可进行左手、右手、左手腕、右手腕的康复训练,功能集成度高,性价比高,训练较为方便。
附图说明
23.下面结合附图和具体实施方式对本发明作进一步详细的说明。
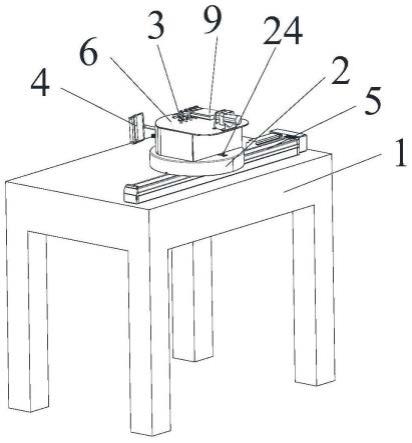
24.图1是本发明实施例的多功能手部康复机器人的立体图;
25.图2是本发明实施例的多功能手部康复机器人的上视角图;
26.图3是本发明实施例的多功能手部康复机器人的部分结构示意图;
27.图4是图2的另一视角的结构示意图;
28.图5是本发明实施例的手指机构的结构示意图;
29.图6是本发明实施例的手腕康复装置的结构示意图;
30.图7是本发明实施例的转盘的部分结构示意图;
31.图8是本发明实施例的手动卡扣的立体图;
32.图9是本发明实施例的手动卡扣的剖视图;
33.图10是本发明实施例的右手腕屈曲/伸展运动时的位置图;
34.图11是本发明实施例的左手腕屈曲/伸展运动时的位置图;
35.图12是本发明实施例的右手腕内收/外展运动时的位置图;
36.图13是本发明实施例的左手腕内收/外展运动时的位置图;
37.图14是本发明实施例的右手腕内旋/外旋运动时的位置图;
38.图15是本发明实施例的四指康复运动时的位置图。
39.图中:1、康复平台,2、转盘,21、下底盘,22、滚动滚珠,23、上端盖,24、手动卡扣,241、按扣安装架,242、滚花按扣,243、倾斜槽,244、卡扣插销,245、卡扣弹簧,246、插销孔,247、轴承,25、垂直板,3、四指康复装置,31、四指驱动电机,32、凸轮,33、康复支架,34、手指机构,341、直线轴承,342、移动柱,343、手指滚珠,344、滑轮,345、压缩弹簧,346、绑带,4、手腕康复装置,41、腕部驱动电机,42、长度调节机构,421、连接块,422、滑动杆,423、调节螺栓,43、方形架,44、第一握把套,45、第二握把套,46、第三握把套,5、位置调节机构,51、调节导轨,52、调节滑块,6、支撑壳体,7、支撑座,8、固定带,9,模型手。
具体实施方式
40.现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
41.如图1-图15所示的本发明的一种多功能手部康复机器人的具体实施例,包括安装在康复平台1上的转盘2、安装在转盘2上用于患者进行四指康复训练的四指康复装置3和用于患者手腕进行康复训练的手腕康复装置4。本实施例中四指康复装置3包括安装在转盘2上的四指驱动电机31、与四指驱动电机31的输出轴同轴设置的凸轮32、安装在转盘2上的康复支架33上且与凸轮32抵接的四组手指机构34;患者手指套设在四指康复装置3上时,凸轮32位于患者手心的一侧。四指驱动电机31带动凸轮32旋转,进而驱动四组手指组件做上下直线运动。
42.本发明的四指康复装置3巧妙地采用一个四指驱动电机31带动凸轮32转动,在做康复训练时四组手指机构34均与凸轮32地接部,采用凸轮32的转动带动手指机构34的上下移动,从而实现对患者的手指从“爪形手畸形”到伸展的运动或从展开状态到屈曲的运动。
43.如图3-5所示,手指机构34包括通过直线轴承341滑动安装在康复支架33上的移动柱342、安装在移动柱342底端的手指滚珠343、转动安装在移动柱342顶端的滑轮344以及套设在直线轴承341的外侧且设置在康复支架33与移动柱342的底端之间的压缩弹簧345,手指滚珠343与凸轮32滚动连接。手指滚珠343由凸轮32支撑驱动,沿直线轴承341做上下直线运动,移动柱342可以绕自身轴线被动旋转,以适应不同手指尺寸和不同运动角度下的手指外展状态。当进行康复训练时,患者的手指放置在滑轮344上,可以主动或被动在滑轮344上移动。
44.采用手指滚珠343与凸轮32滚动连接,在实现动力传递的同时,减少两者之间的摩擦力,保证手指机构34与凸轮32的使用寿命。
45.需要说明的是还包括设置在康复支架33外侧的支撑壳体6,移动柱342穿出康复支架33、支撑壳体6的上端面且与直线轴承341、支撑壳体6转动安装。能够适应四指康复过程中手指收展角度的变化,保证康复训练过程中患者手部的舒适性。参照图6所示,支撑壳体6的上端面设置有用于支撑患者腕部的支撑座7,支撑座7上设置有用于稳固患者腕部的固定带8。用于保证患者在做四指康复训练时手部的稳定性。
46.移动柱342的顶端设置有用于套设患者手指的绑带346,参照图5,当患者的手部为无法弯曲时,拉动患者的手指向手心方向做弯曲运动,本发明采用一个动力源实现四根手指的同时康复训练,节省成本,同时动力源在手心的一侧,在进行康复训练时,通过手指机构34从手心一侧对患者的手部施加力,改变了现有手部康复装置将患者的手指从伸直状态牵引运动到“完全屈曲”的位置的单一康复训练的思维模式,打开关节活动度,通过运动训练等方式恢复到“自然位”状态,实现手功能障碍患者四指从“屈曲”到“伸展”的训练,同时对于手部屈曲动作困难的患者,通过绑带346束缚实现屈曲运动的训练。本发明既适用于初始为“屈曲”状态的手指康复又适用于初始状态为伸直状态的手指康复。
47.如图6-7所示,本实施例中的手腕康复装置4包括安装在转盘2上的腕部驱动电机41、与腕部驱动电机41的输出轴垂直固定设置的长度调节机构42、与长度调节机构42的输出端垂直固定安装的第一转轴以及与第一转轴竖直方向垂直固定连接的方形架43;第一转轴上套设有第一握把套44,方形架43远离第一转轴连接处的竖直杆上套设有第二握把套45,方形架43的中间竖直杆上套设有第三握把套;长度调节机构42的轴线与腕部驱动电机41的输出轴轴线在水平面上相互垂直,第一转轴的轴线与长度调节机构42的轴线在水平面上相互垂直。
48.其中,长度调节机构42包括与腕部驱动电机41的输出轴同轴固定设置的连接块421和滑动设置在连接块421上的滑动杆422;滑动杆422与第一转轴固定连接。长度调节机构42的调节轴线与康复训练时患者的手臂延伸方向平行,用于根据患者的手臂长度调节手腕康复装置4的长度,从而适用不同手臂长度的患者。
49.在腕部驱动电机41的输出轴上设置有扭矩传感器,用于实时检测扭矩,实现手腕的主动康复运动。手腕康复装置4的长度调节机构42、第一连接轴、第二连接轴、方形架43、套设在第一连接轴上的第一握把套44、套设在方形架43远离第一转轴连接处的竖直杆上套
的第二握把套45以及套设在方形架43的中间竖直杆上的第三握把套整体为一体化握把,长度调节机构42上的连接块421和滑动杆422上设置有滑轨滑道,且在连接块421上设置有用于紧固滑动杆422的调节螺栓423。当根据患者的手臂长度连接块421和滑动杆422调节到合适位置后旋紧调节螺栓423固定,可以适应不同手长的人进行手腕康复训练;手腕屈伸训练时握住第一握把套44,手腕内收外展训练时握住第二握把套45、手腕内旋外旋训练时握住第三握把套。
50.如图7所示,转盘2包括下底盘21、安装在下底盘21上的多个滚动滚珠22以及套设在下底盘21上的上端盖23;上端盖23与滚动滚珠22转动连接。本实施例中上端盖23上安装有手动卡扣24,手动卡扣24包括设置在转盘2内部的按扣安装架241、活动安装在按扣安装架241上且一端伸出转盘2的上端盖23的滚花按扣242、开设在按扣安装架241上且与滚花按扣242另一端配合的倾斜槽243,活动安装在倾斜槽243对应的按扣安装架241上的卡扣插销244以及与卡扣插销244对应安装在按扣安装架241上的卡扣弹簧245,具体参照图8和图9。
51.需要进一步说明的是,与卡扣插销244对应的下底盘21上的垂直板25上开设有与卡扣插销244配合的若干插销孔246;当按压手动卡扣24的滚花按扣242时,卡扣插销244从插销孔246中脱出;当松开滚花按扣242时,卡扣插销244弹出到对应的插销孔246中,在按压滚花按扣242时,滚花按扣242下端通过轴承247在倾斜槽243中滑动。
52.在具体使用时,按下滚花按扣242后,卡扣插销244在倾斜槽243和滚花按钮的作用下缩回,从下底盘21上的垂直板25上的插销孔246脱出,上端盖23可以相对于下底盘21自由转动,当转到下一个插销孔246位置时,在卡扣弹簧245的作用下,卡扣插销244自动弹出,将上端盖23与下底盘21固定,本实施例中下底盘21的垂直板25上开设有4个插销孔246,卡扣插销244插入不同插销孔246对应不同康复训练位置,上端盖23的侧面布置了两个紧定螺钉,可以卡入下底盘21的圆槽内,保证上端盖23和下底盘21不会发生轴向相对移动。本发明的转盘2采用按压式的卡扣插销244和插销孔246配合的方式能够实现多个位置的自由切换,从而实现患者在不改变座位位置的情况下实现左右手的切换训练和手腕的三自由度训练,结构简单、可靠性高。
53.康复平台1上设置有用于调节转盘2位置的位置调节机构5,位置调节机构5包括沿x轴方向设置的调节导轨51和与调节导轨51配合滑动连接的调节滑块52;转盘2的下底盘21与调节滑块52固定连接。其中,本实施例中的x轴、y轴、z轴方向以图2中的坐标系为基准。下底盘21与位置调节机构5上的调节滑块52固定,使转盘2能够左右移动从而实现左手、右手康复训练的切换,本实施例中位置调节机构5采用电机转动带动齿轮齿条转动的方式,实现调节滑块52在调节导轨51上的移动,需要说明的是本技术不局限于此种传动调节方式,本领域技术人员能够想到的传动方式均可实现转盘2位置的移动。
54.本手腕康复装置4采用单驱动与一体化握把设计相结合的新方式,实现手部的三种抓握形式,进而较低成本的实现手腕屈曲伸展、内收外展、内旋外旋三自由度的康复训练,同时结构简单,转盘2、位置调节机构5、一体化握把的组合设计,能够实现患者不改变自己座位的位置,就可以进行左手、右手、左手腕、右手腕的康复训练,功能集成度高,性价比高,训练较为方便。
55.采用本实施例的手部康复机器人的四指康复过程如下:
56.按压滚花卡扣241,调节转盘2的下底盘21和上端盖23之间的位置,手动卡扣24上
的卡扣插销244分别插入这四个插销孔246可以到达四个不同位置,当旋转到如图10所示的位置时,做四指康复训练。
57.具体为四指驱动电机31通过凸轮32带动四指康复装置3做z轴方向的直线运动,从患者手心的一侧施力对患者四指进行训练,大多数手功能障碍患者的关节基本没有打开,呈“屈曲”或“爪形手畸形”状态,此时,主要运动形式是“从下往上”,四指的绑带346不起作用,如有患者的手部无法屈曲,则主要运动形式是“从上往下”,此时需要绑带346固定手指。四指康复装置3中的四组手指机构34均可以绕自身轴线被动转动,可适应不同患者的手部尺寸变化,也可适应同一患者训练时四指内收/外展角度的变化。
58.采用本实施例的手部康复机器人的手腕康复过程如下:
59.当调节转盘2旋转到如图11所示的位置时,一体化握把在人体的右侧,患者右手手握第一握把套44对应右手腕的屈伸和收展运动的康复训练,若患者右手手握第三握把套46,如图13所示,实现右手腕内收/外展运动的康复训练;当调节转盘2旋转到如图12所示的位置时,一体化握把在人体的左侧,患者的左手手握第一握把套11,做左手的屈伸/伸展运动的康复训练,若患者左手手握第三握把套46,如图14所示,实现左手腕内收/外展运动的康复训练;当调节转盘2旋转到如图15所示的位置时,一体化握把在人体的中间,患者手握第二握把套45,对应左手或右手腕的内旋/外旋运动的康复训练,本实施例中图10-图15中以模型手9替代患者手的位置。
60.本发明的转盘2与一体化握把的这种组合设计,再辅以位置调节机构5的左右移动,使得患者不用改变自己的位置,就能够实现左手与右手的康复,功能多样,操作方便,加工制造成本低。
61.应当理解,以上所描述的具体实施例仅用于解释本发明,并不用于限定本发明。由本发明的精神所引伸出的显而易见的变化或变动仍处于本发明的保护范围之中。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
