技术特征:
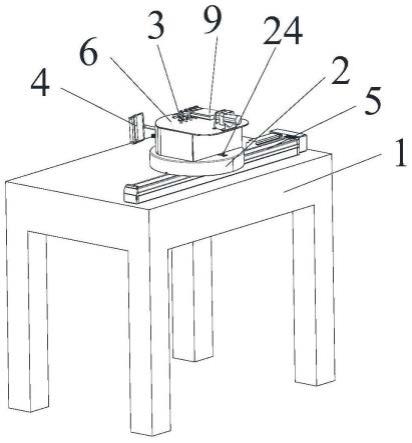
1.一种多功能手部康复机器人,其特征在于:包括安装在康复平台(1)上的转盘(2)、安装在所述转盘(2)上用于患者进行四指康复训练的四指康复装置(3)和用于患者手腕进行康复训练的手腕康复装置(4);所述四指康复装置(3)包括安装在所述转盘(2)上的四指驱动电机(31)、与所述四指驱动电机(31)的输出轴同轴设置的凸轮(32)、安装在所述转盘(2)上的康复支架(33)上且与所述凸轮(32)抵接的四组手指机构(34);患者手指套设在所述四指康复装置(3)上时,所述凸轮(32)位于患者手心的一侧。2.根据权利要求1所述的一种多功能手部康复机器人,其特征在于:所述手指机构(34)包括通过直线轴承(341)滑动安装在所述康复支架(33)上的移动柱(342)、安装在所述移动柱(342)底端的手指滚珠(343)、转动安装在所述移动柱(342)顶端的滑轮(344)以及套设在所述直线轴承(341)的外侧且设置在所述康复支架(33)与所述移动柱(342)的底端之间的压缩弹簧(345);所述手指滚珠(343)与所述凸轮(32)滚动连接。3.根据权利要求2所述的一种多功能手部康复机器人,其特征在于:还包括设置在所述康复支架(33)外侧的支撑壳体(6),所述移动柱(342)穿出所述康复支架(33)、支撑壳体(6)的上端面且与所述直线轴承(341)、支撑壳体(6)转动安装。4.根据权利要求2所述的一种多功能手部康复机器人,其特征在于:所述移动柱(342)的顶端设置有用于套设患者手指的绑带(346)。5.根据权利要求1所述的一种多功能手部康复机器人,其特征在于:所述支撑壳体(6)的上端面设置有用于支撑患者腕部的支撑座(7),所述支撑座(7)上设置有用于稳固患者腕部的固定带(8)。6.根据权利要求1所述的一种多功能手部康复机器人,其特征在于,所述手腕康复装置(4)包括安装在所述转盘(2)上的腕部驱动电机(41)、与所述腕部驱动电机(41)的输出轴垂直固定设置的长度调节机构(42)、与所述长度调节机构(42)的输出端垂直固定安装的第一转轴以及与所述第一转轴竖直方向垂直固定连接的方形架(43);所述第一转轴上套设有第一握把套(44),所述方形架(43)远离所述第一转轴连接处的竖直杆上套设有第二握把套(45),所述方形架(43)的中间竖直杆上套设有第三握把套;所述长度调节机构(42)的轴线与所述腕部驱动电机(41)的输出轴轴线在水平面上相互垂直,所述第一转轴的轴线与所述长度调节机构(42)的轴线在水平面上相互垂直。7.根据权利要求6所述的一种多功能手部康复机器人,其特征在于:所述长度调节机构(42)包括与所述腕部驱动电机(41)的输出轴同轴固定设置的连接块(421)和滑动设置在所述连接块(421)上的滑动杆(422);所述滑动杆(422)与所述第一转轴固定连接。8.根据权利要求1所述的一种多功能手部康复机器人,其特征在于:所述转盘(2)包括下底盘(21)、安装在所述下底盘(21)上的多个滚动滚珠(22)以及套设在所述下底盘(21)上的上端盖(23);所述上端盖(23)与所述滚动滚珠(22)转动连接;所述上端盖(23)上安装有手动卡扣(24),所述手动卡扣(24)包括设置在所述转盘(2)内部的按扣安装架(241)、活动安装在所述按扣安装架(241)上且一端伸出所述转盘(2)的上端盖(23)的滚花按扣(242)、开设在所述按扣安装架(241)上且与所述滚花按扣(242)另一端配合的倾斜槽(243),活动安装在所述倾斜槽(243)对应的按扣安装架(241)上的卡扣插销(244)以及与所述卡扣插销(244)对应安装在所述按扣安装架(241)上的卡扣弹簧
(245)。9.根据权利要求8所述的一种多功能手部康复机器人,其特征在于:与所述卡扣插销(244)对应的所述下底盘(21)上的垂直板(25)上开设有与所述卡扣插销(244)配合的若干插销孔(246);当按压所述手动卡扣(24)的滚花按扣(242)时,所述卡扣插销(244)从所述插销孔(246)中脱出;当松开所述滚花按扣(242)时,所述卡扣插销(244)弹出到对应的插销孔(246)中。10.根据权利要求1所述的一种多功能手部康复机器人,其特征在于:所述康复平台(1)上设置有用于调节所述转盘(2)位置的位置调节机构(5),所述位置调节机构(5)包括沿x轴方向设置的调节导轨(51)和与所述调节导轨(51)配合滑动连接的调节滑块(52);所述转盘(2)的下底盘(21)与所述调节滑块(52)固定连接。
技术总结
本发明属于医疗器械技术领域,具体涉及一种多功能手部康复机器人。机器人将手指康复与手腕康复训练功能结合,本发明的四指康复装置采用一个动力源实现四根手指的同时康复训练,节省成本,动力源在手心的一侧,在进行康复训练时,通过手指机构从手心一侧对患者的手部施加力,改变了现有手部康复装置将患者的手指从伸直状态牵引到屈曲位置的固定思维模式,同时对于手部屈曲动作困难的患者,也可通过绑带束缚实现屈曲运动的训练;本发明的手腕康复训练装置同样采用单一动力源,通过一体化握把与转盘的组合设计,可以实现手腕三自由度的主动与被动训练模式。此外,机器人的转盘和调节机构能够实现患者左手康复与右手康复的互换,降低了成本、适用性较广。适用性较广。适用性较广。
技术研发人员:王洪波 田宇 张大干 牛建业 罗静静 冯永飞 严浩 张学泽
受保护的技术使用者:复旦大学
技术研发日:2022.11.08
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。