1.本发明属于电机技术领域,涉及一种多级式电机低速段转子位置估算方法,具体涉及一种基于低频旋转信号注入且不依赖电机凸极性和励磁机转子位置的多级式无刷电励磁同步电机低速段转子位置实时估算方法。
背景技术:
2.三级式无刷同步电机具有发电品质好、可靠性高的优势,其作为发电机已广泛应用于航空飞机电源系统中。将三级式无刷同步电机运行在电动状态带动航空发动机起动,起动完成后再由发动机带动运行在发电状态为机载用电设备供电,即实现三级式无刷同步电机的起动发电一体化,可以省去发动机专用起动机,减小系统体积重量,提升集成度,对航空飞机电源系统具有重要意义。
3.三级式无刷同步电机运行在电动状态带动航空发动机起动时需要准确的转子位置信息。传统获取转子位置的机械式位置传感器面临可靠性低、系统体积重量增加等问题。三级式无刷同步电机转子位置在线估算可以省去机械式位置传感器,实现在无位置传感器情况下的起动控制,可以提升系统可靠性,减小体积重量。
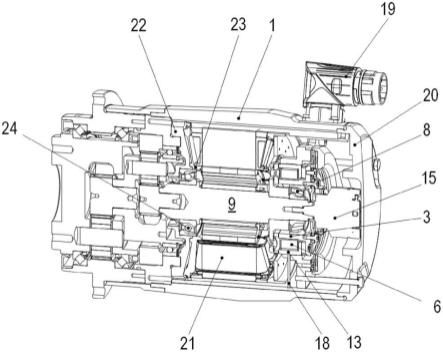
4.三级式无刷同步电机由同轴安装的永磁副励磁机、励磁机和主电机组成,其结构示意图如图1所示。在某些应用场合下可省去永磁副励磁机,形成两级式无刷同步电机。由于核心部件与运行原理基本相同,将三级式无刷同步电机和两级式无刷同步电机统称为多级式无刷同步电机。
5.传统针对多级式无刷同步电机低速段的转子位置估算方法多基于主电机的凸极性,而多级式无刷同步电机运行在电动状态带动航空发动机起动时,主电机凸极性会发生变化,导致传统方法失效。基于“主电机注入-励磁机检测”的转子位置估算方法不依赖于主电机凸极性,在主电机注入,励磁机进行检测和信号处理时,需要进行复杂的平方和运算及滤波处理,才能将信号提取出来。基于无高频信号注入的转子位置估算方法包括励磁机电流谐波法和励磁机转子电流轨迹法,但估算方法较为复杂,且计算量较大,对控制器运算能力要求较高。
6.综上所述,目前多级式无刷同步电机低速段的转子位置估算方法主要面临两个问题:1)低速过程中凸极性变化,会导致传统基于凸极性的低速段转子位置估算方法失效;2)不依赖凸极性的转子位置估算方法估算方法复杂,计算量大,对控制器性能要求较高。
技术实现要素:
7.要解决的技术问题
8.为了避免现有技术的不足之处,本发明提出一种多级式电机低速段转子位置估算方法,克服现有低速段转子位置估算技术中依赖凸极性、数据处理量大的不足。
9.技术方案
10.一种多级式电机低速段转子位置估算方法,其特征在于多级式无刷电励磁同步电
机转子位置是指多级式无刷电励磁同步电机中主电机的转子位置,估算步骤如下:
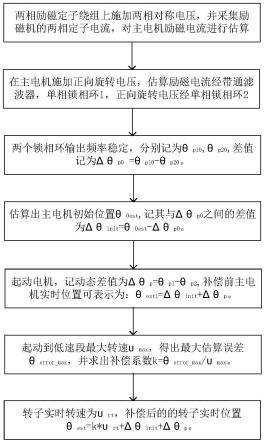
11.步骤1:在两相励磁机定子绕组上施加两相对称电压,采集两相励磁机的定子电流对主电机励磁电流进行实时估算,得到实时估算励磁电流i
f_est
;
12.步骤2:当主电机励磁电流稳定后,在主电机定子绕组上施加正向旋转低频电压,将正向旋转低频电压信号送入第一单相锁相环1,并将估算出的励磁电流i
f_est
经带通滤波器后,送入第二单相锁相环2;
13.步骤3:当第一单相锁相环1和第二单相锁相环2输出频率稳定后,第一单相锁相环1和第二单相锁相环2的输出为θ
p10
和θ
p20
,两个锁相环的相位差为δθ
p0
=θ
p10-θ
p20
且为一固定值;
14.步骤4:主电机初始位置记为θ
0est
,θ
0est
与δθ
p0
的差值记为δθ
init
=θ
0est-δθ
p0
;
15.步骤5:起动电机时,第一单相锁相环1和第二单相锁相环2的输出为θ
p1
和θ
p2
,其动态差值为δθ
p
=θ
p1-θ
p2
;则低速段补偿前主电机转子实时位置为:
16.θ
est1
=δθ
init
δθ
p
;
17.步骤6:起动过程中电机实时速度为v
rt
,则低速段补偿后的主电机转子实时位置为:
18.θ
est
=δθ
init
δθ
p
k
…vrt
19.其中:k为补偿系数。
20.所述多级式无刷电励磁同步电机包括同轴安装的主电机和两相励磁机。
21.所述步骤1在两相励磁机定子绕组上施加两相对称电压为:其中,u
esα
和u
esβ
为两相励磁机定子绕组电压,u
es
为电压幅值,ω
esf
为电压基波角速度,t为时间。
22.所述步骤1的励磁电流i
f_est
为:其中,和分别为估算的两相励磁机转子三相电流,且有:
[0023][0024]
其中,θ
er
∈[0,2π)且可选为任一固定值,m
em
为励磁机定转子互感,r
es
为定子绕组电阻,dt为时间微分,i
esα
和i
esβ
为步骤一中实时采集的两相励磁机定子电流,l
es
为励磁机定子电感。
[0025]
所述步骤2在主电机定子绕组上施加正向旋转低频电压在αβ轴的表达式为:其中,u
l
为电压幅值,t为时间,ω
l
为电压角速度,低频电压周期为
[0026]
所述补偿系数其中:v
max
转/分钟为低速段时最大速度,θ
error_max
为滤波器导致的最大估算误差。
[0027]
所述带通滤波器中心频率带宽f
bw
满足条件其中pn为主电机极对数。
[0028]
所述多级式无刷电励磁同步电机还包括同轴安装的主电机和三相励磁机,将其三相电压或采集三相电流经过clark变换,即得到等效两相励磁机如2中所述的u
esα
和u
esβ
,i
esα
和i
esβ
。
[0029]
有益效果
[0030]
本发明提出的一种多级式电机低速段转子位置估算方法,是一种基于低频旋转信号注入的多级式电机低速段转子位置实时估算方法。通过在主电机定子绕组注入正向旋转的低频电压信号,并实时采集两相励磁机定子绕组电流,对主电机励磁电流进行实时估算,并将估算的励磁电流通过带通滤波器后,与正向旋转的低频电压信号分别经过单相锁相环,两个锁相环输出差值的增量,即为主电机转子位置增量。本发明所提方法不受主电机凸极性和励磁机转子位置影响,估算精度较高,且信号提取及位置估算方法简单,对处理器性能要求较低。
[0031]
本发明的有益效果包括:
[0032]
1)基于主电机定转子互感,避免了传统方法依赖凸极性的低速段转子位置估算方法,因而避免了多级式电机起动过程中因主电机凸极性消失、反转而造成的起动失败问题;
[0033]
2)基于估算的主电机励磁电流和两个单相锁相环对低速段主电机转子位置进行实时估算,两个单相锁相环输出差值的增量即为主电机转子位置的增量,避免了传统基于“主电机注入-励磁机检测”方法中复杂的平方和运算和滤波环节处理,方法更加简单;
[0034]
3)已有基于励磁机电流轨迹法和主电机估算励磁电流方差法等低段转子位置估算方法,需要对励磁机一个周期内的励磁电流进行采集、存储和求方差等处理,对处理器性能要求高,本发明避免了对数据进行过多的存储和数学运算,因而对处理器性能要求更低,更容易推广普及;
[0035]
4)仿真结果如图7所示,估算误差在0.1弧度,即5.7
°
以内,能够满足本领域对误差在10
°
以内的需求。
附图说明
[0036]
图1为三级式无刷同步电机结构示意图。
[0037]
图2为本发明所提多级式无刷同步电机低速段转子位置估算方法流程图。
[0038]
图3为本发明主电机定子绕组注入低频旋转信号波形图。
[0039]
图4为本发明主电机估算励磁电流与经过带通滤波器后所提取低频信号波形图。
[0040]
图5为本发明起动过程中两个单相锁相环输出波形图。
[0041]
图6为本发明给定转速与反馈转速对比图。
[0042]
图7为本发明主电机实际位置与估算位置、估算误差结果图。
具体实施方式
[0043]
现结合实施例、附图对本发明作进一步描述:
[0044]
多级式电机低速段转子位置估算新方法,应用于多级式无刷电励磁同步电机,所述多级式无刷电励磁同步电机包括同轴安装的主电机和两相励磁机,所述多级式无刷电励磁同步电机转子位置是指多级式无刷电励磁同步电机中主电机的转子位置。
[0045]
实施例中多级式无刷同步电机的励磁机为两相励磁机,即励磁机定子励磁绕组为互差90电角度的两相绕组。励磁机为6对极,主电机为3对极。下面以主电机转速从0-240转/分钟为例进行详细说明。
[0046]
1.在所述两相励磁机定子绕组上施加两相对称电压,并采集所述两相励磁机的定子电流对主电机励磁电流进行实时估算,实时估算电流记为i
f_est
;
[0047]
所述励磁机定子两相电压为:
[0048][0049]
其中,u
esα
和u
esβ
为两相励磁机定子绕组电压,u
es
为电压幅值,ω
esf
为电压基波角速度,t为时间,且估算的主电机励磁电流为:
[0050][0051]
其中,和分别为估算的两相励磁机转子三相电流,且有:
[0052][0053]
其中,θ
er
∈[0,2π)且可选为任一固定值,m
em
为励磁机定转子互感,r
es
为定子绕组电阻,dt为时间微分,i
esα
和i
esβ
为步骤一中实时采集的两相励磁机定子电流,l
es
为励磁机定子电感;
[0054]
实施例中在励磁机定子两相绕组(分别记为α相绕组和β相绕组)上施加两相对称电压,励磁电压幅值50v,励磁频率200hz,采集两相励磁机的定子两相电流,分别记为i
esα
和i
esβ
,则有:
[0055][0056]
任意选取θ
er
=π/12,根据式(2)和(3)可估算出主电机励磁电流。当θ
er
与励磁机真实位置之间的误差为时,简称励磁机理想误差,估算出的主电机稳态励磁电流中只有直流量,可表示为i
f_dc
。当θ
er
与励磁机真实位置之间的误差为其他值时,简称励磁机非理想误差,估算出的主电机稳态励磁电流中有直流量和周期交流量,且周期交流量
频率为励磁机定子电压频率的6倍,进而估算出的励磁电流可表示为i
f_dc
i(6ω
esf
t);
[0057]
2.主电机励磁电流稳定后,在所述主电机定子绕组上施加正向旋转低频电压,将正向旋转低频电压信号送入单相锁相环1,并将估算出的励磁电流经带通滤波器后,送入单相锁相环2,带通滤波器带宽和中心频率,由低频电压频率和低速段最大转速共同决定;
[0058]
所述主电机定子绕组上施加正向旋转低频电压在αβ轴的表达式为:
[0059][0060]
其中,u
l
为电压幅值,t为时间,ω
l
为电压角速度,低频电压周期为
[0061]
根据权利要求1所述的方法,其特征在于,将估算出的励磁电流经带通滤波器,带通滤波器中心频率和带宽分别为f0和f
bw
,且f0可表示为:
[0062][0063]
其中pn为主电机极对数,f
bw
满足条件:
[0064][0065]
实施例中注入低频电压幅值u
l
=0.5v,ω
l
=300*2π,则注入的正向旋转低频信号如图3所示,可表示为:
[0066][0067]
则带通滤波器的中心频率f0=294hz,且选取带宽为f
bw
=60hz,在较为复杂的励磁机非理想误差条件下,估算的励磁电流表达式为:
[0068][0069]
其中i
fl
为低频注入感应出的低频电流幅值,θ
real
为转子位置实际值,为信号传递引起的相位延迟,i
f_est
经过带通滤波器后,提取的低频信号表达式为:
[0070][0071]
其中i
fl1
为经过带通滤波器后的低频电流幅值,为信号传递引起的相位总延迟;
[0072]
3.单相锁相环1和2输出频率稳定后,其输出分别记为θ
p10
和θ
p20
,其差值记为δθ
p0
=θ
p10-θ
p20
且为一固定值;
[0073]
4.主电机初始位置记为θ
0est
,θ
0est
与δθ
p0
的差值记为δθ
init
=θ
0est-δθ
p0
;
[0074]
5.起动电机,并记单相锁相环1和2的输出为θ
p1
和θ
p2
,其动态差值为δθ
p
=θ
p1-θ
p2
,则低速段补偿前主电机转子实时位置可表示为:
[0075]
θ
est1
=δθ
init
δθ
p
ꢀꢀꢀ
(11)
[0076]
6.当达到低速段时最大速度v
max
转/分钟时,由滤波器导致的最大估算误差为θ
error_max
,则补偿系数为:
[0077]
[0078]
步骤七:起动过程中电机实时速度为v
rt
,则低速段补偿后的主电机转子实时位置可表示为:
[0079]
θ
est
=δθ
init
δθ
p
k
·vrt
ꢀꢀꢀ
(13)
[0080]
实施例中,当达到低速段时最大速度240转/分钟时,由滤波器导致的最大估算误差为θ
error_max
=0.56弧度,则补偿系数为:
[0081][0082]
7.起动过程中电机实时速度为v
rt
,则低速段补偿后的主电机转子实时位置可表示为:
[0083]
θ
est
=δθ
init
δθ
p
k
·vrt
ꢀꢀꢀ
(15)
[0084]
本发明对主电机励磁电流估算时,如在励磁机理想误差状态下,i(6ω
esf
t)恒为0,i
f_est
经过带通滤波器后,提取的低频信号表达式与励磁机非理想误差状态下相同。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。