1.本技术属于机器人充电技术领域,具体涉及一种机器人系统。
背景技术:
2.当前,机器人的应用越来越多,机器人的充电问题也得到重视。
3.当前市场采用的充电方式为接触式充电,即机器人与充电机构相接触来实现充电,但是,如此一来,对机器人的充电位置要求较高,而且,接触式充电方式通常采用插头和接口相配合的结构,需要较高的定位精度,容易出现接触不良、无法充电的情况,故充电效果和充电安全性无法保证。
技术实现要素:
4.本技术实施例的目的是提供一种机器人系统,能够解决相关技术中机器人的充电位置要求高、充电效果和充电安全性较差的问题。
5.本技术实施例提供一种机器人系统,包括机器人主体、充电桩以及充电组件,其中:
6.所述机器人主体和所述充电桩可分离设置,且所述机器人主体相对所述充电桩可移动;
7.所述充电组件包括发射线圈和接收线圈,所述发射线圈设于所述充电桩,所述机器人主体包括壳组,所述壳组设有第一空腔,所述接收线圈设于所述第一空腔;
8.在所述机器人主体移动至预设充电位、且所述发射线圈和所述接收线圈均处于通电状态的情况下,所述发射线圈和所述接收线圈之间产生电磁感应,所述充电桩对所述机器人主体充电。
9.在本技术实施例中,机器人主体与充电桩之间采用非接触式充电方式,利用电磁感应原理进行充电,故对机器人主体的定位精度低,充电位置要求较低;同时,规避充电插头和接口的使用,不会出现接触不良、无法充电的情况,故充电效果和安全性得到保证。另外,接收线圈安装在壳组的第一空腔内,不会暴露于空气中,避免接收线圈被破坏。
附图说明
10.图1是本技术实施例公开的机器人系统的结构示意图;
11.图2是本技术实施例公开的机器人主体的剖视图;
12.图3是本技术实施例公开的充电桩的剖视图;
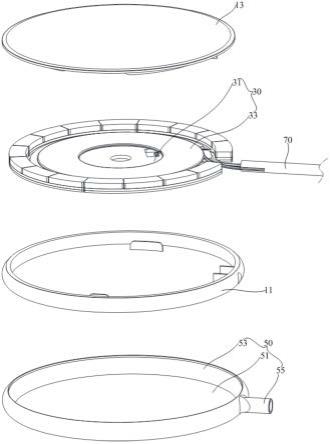
13.图4是本技术实施例公开的机器人主体的结构示意图;
14.图5是本技术实施例公开的机器人系统的俯视图;
15.图6是本技术实施例公开的壳体的结构示意图。
16.附图标记说明:
17.100-机器人主体;110-壳组;111-壳体;112-第一支架;120-底盘;
18.200-充电桩;210-主体部;211-第一端;212-第二端;220-凸起部;230-避让空间;
19.310-发射线圈;320-接收线圈;
20.400-第二支架;410-第一支撑部;420-第二支撑部;
21.500-第一控制器;
22.600-第二控制器;
23.700-第三支架;
24.800-第四支架。
具体实施方式
25.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员获得的所有其他实施例,都属于本技术保护的范围。
26.本技术的说明书和权利要求书中的术语“第一”、“第二”等是用于区别类似的对象,而不用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便本技术的实施例能够以除了在这里图示或描述的那些以外的顺序实施,且“第一”、“第二”等所区分的对象通常为一类,并不限定对象的个数,例如第一对象可以是一个,也可以是多个。此外,说明书以及权利要求中“和/或”表示所连接对象的至少其中之一,字符“/”,一般表示前后关联对象是一种“或”的关系。
27.下面结合附图,通过具体的实施例及其应用场景对本技术实施例提供的机器人系统进行详细地说明。
28.参考图1-图6,本技术公开的机器人系统包括机器人主体100、充电桩200以及充电组件。其中,机器人主体100能够在某一平面内移动,充电桩200储存有电能或者连接外部供电设备,且充电桩200借助充电组件,能够将电能输送给机器人主体100,从而对机器人主体100供电。
29.如图1所示,机器人主体100和充电桩200可分离设置,且机器人主体100相对充电桩200可移动。具体地,在机器人主体100处于使用状态的情况中,机器人主体100在某一平面内相对充电桩200移动;在机器人主体100处于未使用状态的情况下,机器人主体100相对充电桩200的位置固定,且机器人主体100可以与充电桩200连接在一起,或者,机器人主体100与充电桩200分离设置。
30.在本实施例中,机器人主体100为清洁机器人。当然,机器人主体100也可以采用其它类别的机器人。
31.如图2和图3所示,充电组件包括发射线圈310和接收线圈320,其中,发射线圈310设置于充电桩200,具体地,发射线圈310可以设置在充电桩200之内,也可以设置在充电桩200的外表面,也可以设置在充电桩200的其它位置;机器人主体100包括壳组110,壳组110具有第一空腔,接收线圈320设置在第一空腔内。也就是说,接收线圈320由壳组110包围,故接收线圈320不会暴露于空气中。
32.具体地,通常机器人主体100包括主体结构件,主体结构件可以与接收线圈320共同设置在第一空腔内,主体结构件也可以设置在机器人主体100上不同于第一空腔的空间内。
33.这样一来,在机器人主体100移动至预设充电位、且发射线圈310和接收线圈320均处于通电状态的情况下,如图1所示,发射线圈310和接收线圈320相对,此时发射线圈310和接收线圈320之间产生电磁感应,从而使充电桩200对机器人主体100充电。
34.需要说明的是,预设充电位并非一个固定位置,而是泛指发射线圈310和接收线圈320能够产生电磁感应的情况下,机器人主体100所处的位置。
35.如此设置,机器人主体100与充电桩200之间采用非接触式充电方式,利用电磁感应原理进行充电,故对机器人主体100的定位精度低,充电位置要求较低;同时,规避充电插头和接口的使用,不会出现接触不良、无法充电的情况,故充电效果和安全性得到保证。另外,接收线圈320安装在壳组110的第一空腔内,不会暴露于空气中,避免接收线圈320被破坏。
36.在可选的实施例中,壳组110包括壳体111,壳体111的内部设有第三空腔,主体结构件设置在第三空腔内,且接收线圈320设置在壳体111之外。这样一来,接收线圈320不会占用壳体111的内部空间,即接收线圈320不会占用第三空腔,进而避免主体结构件空间不足的情况。
37.具体地,如图2所示,壳组110还包括第一支架112,第一支架112设置在壳体111的外表面,且第一支架112与接收线圈320相连,壳体111的外表面设有第一凹槽,第一凹槽与第一支架112共同构成第一空腔,接收线圈320设置在第一凹槽内。其中,第一支架112与接收线圈320之间可通过焊接、粘接等方式固定连接,也可以通过螺纹紧固件(如螺栓)连接的方式实现可拆卸连接。而且,此处对第一支架112的结构不做限制,能够封闭第一凹槽且能够与壳体111连接即可。
38.在安装过程中,首先将接收线圈320与第一支架112相连接,然后接收线圈320伸入第一凹槽的同时,第一支架112封闭第一凹槽的槽口,最后对第一支架112和壳体111进行连接即可。
39.当然,在其它实施例中,第一凹槽可以设置在第一支架112上,接收线圈320设置在第一凹槽内,壳体111封闭第一凹槽的槽口;也可以第一支架112和壳体111的外表面均设有第一凹槽,两个第一凹槽共同构成第一空腔。
40.如此设置,壳体111与第一支架112相配合,既能对接收线圈320进行封闭保护,避免接收线圈320裸露,又能避免接收线圈320占用壳体111的内部空间。
41.可选地,第一支架112与壳体111可拆卸地相连接。具体地,第一支架112与壳体111可以通过螺纹连接件(如螺栓)进行连接,也可以通过卡接结构相连接,也可以通过其它可拆卸方式连接。在本实施例中,第一支架112和壳体111均设有螺纹孔,通过螺纹连接件依次贯穿第一支架112的螺纹孔和壳体111的螺纹孔,从而实现第一支架112和壳体111的连接。
42.当然,在其它实施例中,第一支架112与壳体111之间也可以通过焊接、粘接等方式固定连接。
43.如此设置,使用者能够根据需要对第一支架112进行安装或拆卸,进而对接收线圈320进行安装或拆卸,便于检修。
44.在可选的实施例中,机器人主体100为清扫机器人,清扫机器人设有清扫盘,清扫盘凸起于壳组110,也就是说,清扫盘凸起于壳体111的外表面,而且,如图3所示,充电桩200具有避让空间230,在机器人主体100移动至预设充电位的情况下,清扫盘伸入避让空间230
内。
45.机器人主体100充电时,机器人主体100与充电桩200之间的距离较近,清扫盘容易撞击充电桩200。如此设置,由于避让空间230的存在,避免清扫盘撞击充电桩200,保证充电的顺利进行。
46.可选地,充电桩200包括主体部210和凸起部220,凸起部220设置于主体部210,发射线圈310设于凸起部220,发射线圈310在凸起部220上的位置不做限制。而且,在垂直于第一平面的方向上,主体部210具有第一端211和第二端212,凸起部220位于第一端211和第二端212之间,避让空间230设置在凸起部220和第一端211之间。其中,第一平面为机器人主体100的移动平面,垂直于第一平面的方向为机器人主体100的高度方向,也就是第一端211至第二端212的方向。需要说明的是,垂直于第一平面的方向即为图3中y方向。
47.如此设置,在机器人主体100移动至预设充电位的情况下,凸起部220面向机器人主体100,同时,由于发射线圈310设置在凸起部220上,故接收线圈320与发射线圈310之间的距离较小,保证足够的电磁感应强度,进而保证充电效率。
48.在本实施例中,发射线圈310设置在凸起部220远离主体部210的端部。这样一来,在机器人主体100移动至预设充电位的情况下,发射线圈310与接收线圈320之间的距离进一步减小,进一步增大电磁感应强度,提高充电效率。
49.在可选的实施例中,充电组件还包括第二支架400,第二支架400设置于凸起部220,发射线圈310设置在第二支架400上,且第二支架400与凸起部220可拆卸地相连。具体地,第二支架400作为发射线圈310安装到凸起部220上的中间连接件,第二支架400与发射线圈310之间可以通过粘接、焊接等固定连接方式相连接,也可以通过螺纹连接件(如螺栓)、卡接结构等可拆卸方式相连接;第二支架400与凸起部220之间也可以通过螺纹连接件(如螺栓)、卡接结构等可拆卸方式相连接。
50.在本实施例中,第二支架400和凸起部220均设有螺纹孔,螺纹连接件依次贯穿第二支架400的螺纹孔和凸起部220的螺纹孔,以实现第二支架400和凸起部220的连接,此处对第二支架400的具体结构不做限制。
51.如此设置,使用者能够根据需要对第二支架400进行安装或拆卸,进而对发射线圈310进行安装或拆卸,便于检修。
52.在可选的实施例中,如图3所示,第二支架400包括第一支撑部410和第二支撑部420,第一支撑部410设有第二凹槽,发射线圈310位于第二凹槽内,第二支撑部420设置在第二凹槽的槽口处,即第二支撑部420封闭第二凹槽的槽口,第一支撑部410和第二支撑部420共同构成封闭的第二空腔,发射线圈310设置在第二空腔内。
53.具体地,发射线圈310可以与第二支撑部420相连接,在第二支撑部420封闭第二凹槽的同时,发射线圈310伸入第二凹槽内,发射线圈310与第二支撑部420之间可以固定连接,也可以采用可拆卸方式相连接。对于第一支撑部410与凸起部220的连接方式不做限制,二者可以固定连接,也可以采用可拆卸方式相连接。
54.在本实施例中,第一支撑部410和凸起部220中的一者与第二支撑部420可拆卸地相连,可拆卸连接方式可以为螺栓连接、通过卡接结构相连接等方式。这样一来,第二支撑部420安装或拆卸的同时,能够实现发射线圈310的安装或拆卸。
55.如此设置,第一支撑部410和第二支撑部420作为中间连接件,实现发射线圈310的
安装,同时,第一支撑部410和第二支撑部420构成第二空腔来容纳发射线圈310,对发射线圈310进行保护。
56.在本技术的技术方案中,充电组件还包括第一控制器500和第二控制器600中的至少一者。也就是说,充电组件可以包括第一控制器500,也可以包括第二控制器600,也可以包括第一控制器500和第二控制器600。
57.其中,第一控制器500设置于机器人主体100,第一控制器500用于控制接收线圈320的电连通或电断开,第一控制器500与接收线圈320通信连接。具体地,第一控制器500可以设置在壳体111之内,也可以设置在壳体111之外,此处对第一控制器500的具体位置不做限制。在本实施例中,参考图2、图4和图6所示,第一控制器500安装在壳体111之内。
58.第二控制器600设置于充电桩200,第二控制器600用于控制发射线圈310的电连通或电断开,第二控制器600与发射线圈310通信连接。具体地,第二控制器600可以设置在充电桩200的内部,也可以设置在充电桩200的表面,此处对第二控制器600的具体位置不做限制。在本实施例中,参考图3所示,第二控制器600安装在主体部210之内,且位于主体部210背向凸起部220的一侧。
59.在本实施例中,充电组件包括第一控制器500和第二控制器600,在机器人主体100移动至预设充电位的情况下,第一控制器500控制发射线圈310通电,第二控制器600控制接收线圈320通电;在机器人主体100离开预设充电位的情况下,第一控制器500控制发射线圈310断电,第二控制器600控制接收线圈320断电。
60.如此设置,在机器人主体100脱离预设充电位的情况下,即充电桩200未对机器人主体100充电时,控制第一控制器500和第二控制器600中的至少一者,能够使接收线圈320和发射线圈310中的至少一者断电,停止电磁感应过程,避免未充电状态下充电组件耗电。
61.可选地,充电组件还包括第三支架700和第四支架800中的至少一者。具体地,在充电组件包括第一控制器500的情况下,充电组件还包括第三支架700;在充电组件包括第二控制器600的情况下,充电组件还包括第四支架800;在充电组件包括第一控制器500和第二控制器600的情况下,充电组件还包括第三支架700和第四支架800中的至少一者,也就是说,此时,充电组件可以包括第三支架700,可以包括第四支架800,也可以包括第三支架700和第四支架800。
62.其中,如图2所示,第三支架700设置在壳组110之内,具体地,第三支架700设置在壳体111的内部空间内,也就是设置在上述壳体111的第三空腔内,同时,第一控制器500安装在第三支架700上,且第三支架700与机器人主体100相连。也就是说,第三支架700作为第一控制器500安装到机器人主体100上的中间连接件。
63.可选地,第三支架700可以与壳体111可拆卸地相连接。在本实施例中,机器人主体100还包括底盘120,底盘120伸入壳体111之内,且第三支架700与底盘120可拆卸地相连,此处对第三支架700的具体结构不做限制。具体地,第三支架700与底盘120可以通过螺纹连接件(如螺栓)相连接,也可以通过卡接结构相连接,也可以通过其它方式实现可拆卸连接。
64.如此设置,利用第三支架700,将第一控制器500安装到机器人主体100上,并且根据需要对第三支架700进行安装或拆卸,进而对第一控制器500进行安装或拆卸,便于检修。
65.在可选的实施例中,第四支架800设置于充电桩200之内,具体地,第四支架800可以设置在主体部210内,当然,第四支架800也可以设置在凸起部220内。同时,第二控制器
600安装于第四支架800,且第四支架800与充电桩200相连。也就是说,第四支架800作为第二控制器600安装到充电桩200上的中间连接件。
66.可选地,第四支架800可以与充电桩200可拆卸地相连接。其中,第四支架800可以与主体部210可拆卸地相连,也可以与凸起部220可拆卸地相连。具体地,第四支架800与充电桩200可以通过螺纹连接件(如螺栓)相连接,也可以通过卡接结构相连接,也可以通过其它方式实现可拆卸连接。
67.如此设置,通过第四支架800,将第二控制器600安装到充电桩200上,并且根据需要对第四支架800进行安装或拆卸,进而对第二控制器600进行安装或拆卸,便于检修。
68.上面结合附图对本技术的实施例进行了描述,但是本技术并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本技术的启示下,在不脱离本技术宗旨和权利要求所保护的范围情况下,还可做出很多形式,均属于本技术的保护之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。