1.本发明涉及相变换热设备技术领域,具体涉及一种高温热管内部气相工质多参数测量系统及工作方法。
背景技术:
2.高温热管通常采用液态金属作为工质,由于液态金属具有汽化潜热高的优点,高温热管可以实现高效的热量传递。由于高温热管无运动部件,可应用于太阳能集热器、热管冷却反应堆、航天飞行器热防护等领域。由于液态金属是非透明的,并且基于材料相容性的考量,高温热管的管壳材料通常选用镍、钼、钨等非透明的高温金属结构材料,因此,通过可视化的手段对高温热管内部工质进行的测量是困难的。此外,高温热管内部初始为高真空状态且工作温度较高,在高温热管内部布置传感器也较为困难。本发明针对液态金属高温热管的气相工质参数难以测量的问题,提出了一种高温热管内部气相工质多参数测量系统及工作方法,以期获得高温热管内气相工质的参数指导高温热管的优化。
技术实现要素:
3.为实现高温热管内部气相工质参数的测量,本发明的目的在于提供一种高温热管内部气相工质多参数测量系统及工作方法,本发明系统结构简化,响应快速,抗干扰能力强,可用于液态金属高温热管内部气相工质参数的测量。
4.为了达到上述目的,本发明采取以下技术方案:
5.一种高温热管内部气相工质多参数测量系统,包括处理器1、第一信号发生器21、第二信号发生器22、第一激光控制器31、第二激光控制器32、第一半导体激光器41、第二半导体激光器42、光纤耦合分束器5、标准发射端准直器61、第二热管发射端准直器62、第三热管发射端准直器63、第四热管发射端准直器64、高温热管7、热管第二光路82、热管第三光路83、热管第四光路84、第二热管接收端准直器92、第三热管接收端准直器93、第四热管接收端准直器94、近红外标准具101、第二热管光电探测器102、第三热管光电探测器103、第四热管光电探测器104、第一信号放大器111、第二信号放大器112、第三信号放大器113、第四信号放大器114、第一锁相放大器121、第二锁相放大器122、第三锁相放大器123、第四锁相放大器124、第一信号转换器131、第二信号转换器132、第三信号转换器133、第四信号转换器134、数据集成器14和超声波增材焊机15;所述处理器1分别连接第一信号发生器21的输入端和第二信号发生器22的输入端,第一信号发生器21的输出端依次连接第一激光控制器31和第一半导体激光器41,第二信号发生器22的输出端依次连接第二激光控制器32和第二半导体激光器42,第一半导体激光器41和第二半导体激光器42产生的激光通过光纤到达光纤耦合分束器5并分束为四条光路分别连接至标准发射端准直器61、第二热管发射端准直器62、第三热管发射端准直器63和第四热管发射端准直器64,标准发射端准直器61的激光发射至近红外标准具101,近红外标准具101产生的信号依次经过第一信号放大器111、第一锁相放大器121、第一信号转换器131到达数据集成器14,第二热管发射端准直器62的激光在
高温热管7内形成热管第二光路82并被第二热管接收端准直器92接收传输至第二热管光电探测器102,第二热管光电探测器102产生的信号依次经过第二信号放大器112、第二锁相放大器122、第二信号转换器132到达数据集成器14,第三热管发射端准直器63的激光在高温热管7内形成热管第三光路83并被第三热管接收端准直器93接收传输至第三热管光电探测器103,第三热管光电探测器103产生的信号依次经过第三信号放大器113、第三锁相放大器123、第三信号转换器133到达数据集成器14,第四热管发射端准直器64的激光在高温热管7内形成热管第四光路84并被第四热管接收端准直器94接收传输至第四热管光电探测器104,第四热管光电探测器104产生的信号依次经过第四信号放大器114、第四锁相放大器124、第四信号转换器134到达数据集成器14,数据集成器14汇总数据传输至处理器1;所述第二热管发射端准直器62、第三热管发射端准直器63、第四热管发射端准直器64、第二热管接收端准直器92、第三热管接收端准直器93、第四热管接收端准直器94穿透高温热管7的壁面,第二热管发射端准直器62和第二热管接收端准直器92直线对齐形成热管第二光路82,第三热管发射端准直器63和第三热管接收端准直器93直线对齐形成热管第三光路83,第四热管发射端准直器64和第四热管接收端准直器94直线对齐形成热管第四光路84,热管第二光路82和第三光路83与高温热管7的轴向方向垂直,热管第四光路84与高温热管7的轴向方向成锐角;所述第二热管发射端准直器62、第三热管发射端准直器63、第四热管发射端准直器64、第二热管接收端准直器92、第三热管接收端准直器93、第四热管接收端准直器94通过超声波增材焊机15焊接至高温热管7管壁实现密封。
6.所述第一半导体激光器41和第二半导体激光器42为可调谐半导体激光器,选用外腔调谐半导体激光器、垂直腔表面发射激光器、法珀激光器、分布反馈式半导体激光器或分布布拉格反射激光器。
7.所述第一半导体激光器41和第二半导体激光器42产生不同波长的激光:对于采用钠为工质的高温热管7,第一半导体激光器41和第二半导体激光器42分别产生波长为589.6纳米和589纳米的激光;对于钾为工质的高温热管7,第一半导体激光器41和第二半导体激光器42分别产生波长为766.0纳米和766.5纳米或769.9纳米和770.1纳米的激光;对于锂为工质的高温热管7,第一半导体激光器41和第二半导体激光器42分别产生波长为纳米670.8纳米或610.4纳米的激光。
8.所述第二热管发射端准直器62、第三热管发射端准直器63、第四热管发射端准直器64、第二热管接收端准直器92、第三热管接收端准直器93和第四热管接收端准直器94采用蓝宝石镜面或石英玻璃镜面,镜面为聚光镜面以提升信号质量。
9.所述高温热管7内部气相工质的测量参数为温度、压力、速度和流量。
10.所述第二热管发射端准直器62、第三热管发射端准直器63、第四热管发射端准直器64、第二热管接收端准直器92、第三热管接收端准直器93、第四热管接收端准直器94和高温热管7之间采用与高温热管7同种材料的薄膜通过超声波增材焊机15焊接。
11.所述第一半导体激光器41和第二半导体激光器42能产生高频正弦波信号及低频扫描信号,高频正弦波信号实现激光信号的高频调制,降低低频噪声的干扰。
12.所述的一种高温热管内部气相工质多参数测量系统的工作方法,步骤如下:
13.步骤1:将第二热管发射端准直器62、第三热管发射端准直器63和第四热管发射端准直器64分别与第二热管接收端准直器92、第三热管接收端准直器93和第四热管接收端准
直器94以两两组合的方式穿透高温热管7的管壁并通过超声波增材焊机15实现固定;
14.步骤2:对高温热管7的蒸发端进行加热,对高温热管7的冷凝段进行冷却;
15.步骤3:待高温热管7测点位置的温度高于高温热管7内工质的熔点后,通过处理器1控制第一信号发生器21和第二信号发生器22向第一激光控制器31和第二激光控制器32发出信号,第一激光控制器31和第二激光控制器32产生驱动信号驱动第一半导体激光器41和第二半导体激光器42产生不同波长的激光;第一半导体激光器41和第二半导体激光器42发出的两束激光经过光纤耦合分束器5后分束成为四束激光分别进入标准发射端准直器61、第二热管发射端准直器62、第三热管发射端准直器63和第四热管发射端准直器64;通过近红外标准具101接收标准发射端准直器61的光信号;通过第二热管光电探测器102接收经第二热管发射端准直器62、热管第二光路82和第二热管接收端准直器92的光信号;通过第三热管光电探测器103接收经第三热管发射端准直器63、热管第三光路83和第三热管接收端准直器93的光信号;通过第四热管光电探测器104接收经第四热管发射端准直器64、热管第四光路84和第四热管接收端准直器94的激光;近红外标准具101的信号分别经过第一信号放大器111、第一锁相放大器121和第一信号转换器131到达数据集成器14和处理器1,并记录数据;第二热管光电探测器102的信号分别经过第二信号放大器112、第二锁相放大器122和第二信号转换器132到达数据集成器14和处理器1,并记录数据;第三热管光电探测器103的信号分别经过第三信号放大器113、第三锁相放大器123和第三信号转换器133到达数据集成器14和处理器1,并记录数据;第四热管光电探测器104的信号分别经过第四信号放大器114、第四锁相放大器124和第四信号转换器134到达数据集成器14和处理器1,并记录数据;
16.通过标准发射端准直器61和近红外标准具101之间的光路获得激光器光强调制系数和调制深度;
17.步骤3:基于比尔朗伯定律和免标定wms-2f/1f理论,根据记录的激光吸收谱线和高温热管7的测点布置,计算获得高温热管7的测点位置的气相工质温度、压力、速度和流量。
18.和现有技术相比较,本发明具备如下优点:
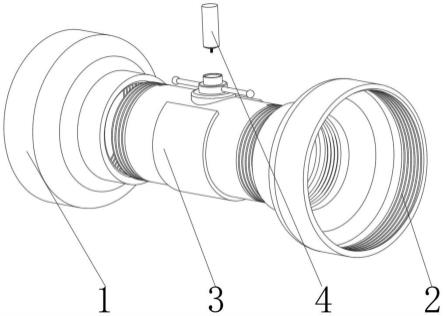
19.本发明超声波增材焊机实现在高温热管7管壁上安装第二热管发射端准直器62、第三热管发射端准直器63、第四热管发射端准直器64、第二热管接收端准直器92、第三热管接收端准直器93、第四热管接收端准直器94,相比传统焊接方式,具有热影响区域小、形变量小、密封高、一体化程度好的优点;通过热管第二光路82、热管第三光路83、热管第四光路84的气相工质的吸收光谱的测量,同时实现气相工质温度、压力、速度在内的多参数测量,采用非侵入测量方法对高温热管7内工质的流场影响小,响应速度高。
附图说明
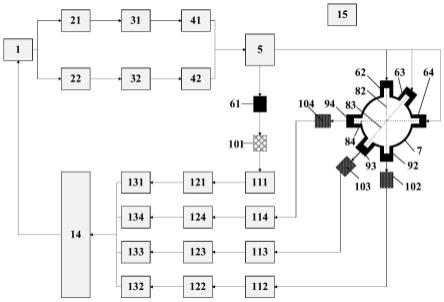
20.图1为本发明高温热管内部气相工质多参数测量系统示意图。
具体实施方式
21.现结合实例、附图对本发明作进一步描述:
22.如图1所示,本发明一种高温热管内部气相工质多参数测量系统,包括处理器1、第
一信号发生器21、第二信号发生器22、第一激光控制器31、第二激光控制器32、第一半导体激光器41、第二半导体激光器42、光纤耦合分束器5、标准发射端准直器61、第二热管发射端准直器62、第三热管发射端准直器63、第四热管发射端准直器64、高温热管7、热管第二光路82、热管第三光路83、热管第四光路84、第二热管接收端准直器92、第三热管接收端准直器93、第四热管接收端准直器94、近红外标准具101、第二热管光电探测器102、第三热管光电探测器103、第四热管光电探测器104、第一信号放大器111、第二信号放大器112、第三信号放大器113、第四信号放大器114、第一锁相放大器121、第二锁相放大器122、第三锁相放大器123、第四锁相放大器124、第一信号转换器131、第二信号转换器132、第三信号转换器133、第四信号转换器134、数据集成器14和超声波增材焊机15;所述处理器1分别连接第一信号发生器21的输入端和第二信号发生器22的输入端,第一信号发生器21的输出端依次连接第一激光控制器31和第一半导体激光器41,第二信号发生器22的输出端依次连接第二激光控制器32和第二半导体激光器42,第一半导体激光器41和第二半导体激光器42产生的激光通过光纤到达光纤耦合分束器5并分束为四条光路分别连接至标准发射端准直器61、第二热管发射端准直器62、第三热管发射端准直器63和第四热管发射端准直器64,标准发射端准直器61的激光发射至近红外标准具101,近红外标准具101产生的信号依次经过第一信号放大器111、第一锁相放大器121、第一信号转换器131到达数据集成器14,第二热管发射端准直器62的激光在高温热管7内形成热管第二光路82并被第二热管接收端准直器92接收传输至第二热管光电探测器102,第二热管光电探测器102产生的信号依次经过第二信号放大器112、第二锁相放大器122、第二信号转换器132到达数据集成器14,第三热管发射端准直器63的激光在高温热管7内形成热管第三光路83并被第三热管接收端准直器93接收传输至第三热管光电探测器103,第三热管光电探测器103产生的信号依次经过第三信号放大器113、第三锁相放大器123、第三信号转换器133到达数据集成器14,第四热管发射端准直器64的激光在高温热管7内形成热管第四光路84并被第四热管接收端准直器94接收传输至第四热管光电探测器104,第四热管光电探测器104产生的信号依次经过第四信号放大器114、第四锁相放大器124、第四信号转换器134到达数据集成器14,数据集成器14汇总数据传输至处理器1;所述第二热管发射端准直器62、第三热管发射端准直器63、第四热管发射端准直器64、第二热管接收端准直器92、第三热管接收端准直器93、第四热管接收端准直器94穿透高温热管7的壁面,第二热管发射端准直器62和第二热管接收端准直器92直线对齐形成热管第二光路82,第三热管发射端准直器63和第三热管接收端准直器93直线对齐形成热管第三光路83,第四热管发射端准直器64和第四热管接收端准直器94直线对齐形成热管第四光路84,热管第二光路82和第三光路83与高温热管7的轴向方向垂直,热管第四光路84与高温热管7的轴向方向成锐角;所述第二热管发射端准直器62、第三热管发射端准直器63、第四热管发射端准直器64和第二热管接收端准直器92、第三热管接收端准直器93、第四热管接收端准直器94通过超声波增材焊机15焊接至高温热管7管壁实现密封。
23.作为本发明的优选实施方式,所述第一半导体激光器41、第二半导体激光器42为可调谐半导体激光器,选用外腔调谐半导体激光器、垂直腔表面发射激光器、法珀激光器、分布反馈式半导体激光器或分布布拉格反射激光器,具有质量轻、体积小、调制效率高、易于控制的优点。
24.作为本发明的优选实施方式,所述第一半导体激光器41和第二半导体激光器42产
生不同波长的激光:对于采用钠为工质的高温热管7,第一半导体激光器41和第二半导体激光器42分别产生波长为589.6纳米和589纳米的激光;对于钾为工质的高温热管7,第一半导体激光器41和第二半导体激光器42分别产生波长为766.0纳米和766.5纳米或769.9纳米和770.1纳米的激光;对于锂为工质的高温热管7,第一半导体激光器41、第二半导体激光器42分别产生波长为纳米670.8纳米或610.4纳米的激光;针对不同工质的高温热管,采用不同频率激光,具有非侵入、响应迅速、适应性强的优点,对高温热管7内工质流场影响小。
25.作为本发明的优选实施方式,所述第二热管发射端准直器62、第三热管发射端准直器63、第四热管发射端准直器64、第二热管接收端准直器92、第三热管接收端准直器93、第四热管接收端准直器94采用蓝宝石镜面或石英玻璃镜面,镜面为聚光镜面以提升信号质量。
26.作为本发明的优选实施方式,所述高温热管7内部气相工质的测量参数为温度、压力、速度、流量。
27.作为本发明的优选实施方式,所述第二热管发射端准直器62、第三热管发射端准直器63、第四热管发射端准直器64、第二热管接收端准直器92、第三热管接收端准直器93、第四热管接收端准直器94和高温热管7之间采用与高温热管7同种材料的薄膜通过超声波增材焊机15焊接,采用超声波增材焊机15易于控制热影响区域,具有一致性好、密封性佳的优点。
28.作为本发明的优选实施方式,所述第一半导体激光器41和第二半导体激光器42可以产生高频正弦波信号及低频扫描信号,正弦波信号实现激光信号的高频调制,降低低频噪声的干扰。
29.本发明的工作原理为:将第二热管发射端准直器62、第三热管发射端准直器63和第四热管发射端准直器64分别与第二热管接收端准直器92、第三热管接收端准直器93和第四热管接收端准直器94以两两组合的方式穿透高温热管7的管壁并通过超声波增材焊机15实现固定。对高温热管7的蒸发端进行加热,对高温热管7的冷凝段进行冷却。待高温热管7测点位置的温度高于高温热管7内工质的熔点后,通过处理器1控制第一信号发生器21和第二信号发生器22向第一激光控制器31和第二激光控制器32发出信号,第一激光控制器31和第二激光控制器32产生驱动信号驱动第一半导体激光器41和第二半导体激光器42产生不同波长的激光。第一半导体激光器41和第二半导体激光器42发出的两束激光经过光纤耦合分束器5后分束成为四束激光分别进入标准发射端准直器61、第二热管发射端准直器62、第三热管发射端准直器63和第四热管发射端准直器64。通过近红外标准具101接收标准发射端准直器61的光信号;通过第二热管光电探测器102接收经第二热管发射端准直器62、热管第二光路82和第二热管接收端准直器92的光信号;通过第三热管光电探测器103接收经第三热管发射端准直器63、热管第三光路83和第三热管接收端准直器93的光信号;通过第四热管光电探测器104接收经第四热管发射端准直器64、热管第四光路84和第四热管接收端准直器94的激光。近红外标准具101的信号分别经过第一信号放大器111、第一锁相放大器121和第一信号转换器131到达数据集成器14和处理器1,并记录数据;第二热管光电探测器102的信号分别经过第二信号放大器112、第二锁相放大器122和第二信号转换器132到达数据集成器14和处理器1,并记录数据;第三热管光电探测器103的信号分别经过第三信号放大器113、第三锁相放大器123和第三信号转换器133到达数据集成器14和处理器1,并记录
数据;第四热管光电探测器104的信号分别经过第四信号放大器114、第四锁相放大器124和第四信号转换器134到达数据集成器14和处理器1,并记录数据。
30.通过标准发射端准直器61和近红外标准具101之间的光路获得激光器光强调制系数和调制深度。
31.基于比尔朗伯定律,针对热管第二光路82来自第一半导体激光器41、第二半导体激光器42并经光纤耦合分束器5分束的不同频率的激光821和激光822获得公式(1)和公式(2)。公式(1)和公式(2)中未知量为po、t、x
abs,o
,且基于工质状态方程可知x
abs,o
为po和t的函数。联立公式(1)和公式(2)和工质状态方程,可以获得高温热管7测点处的工质温度和压力,并由温度和压力基于状态方程获得工质的密度。
[0032][0033][0034]
式中,α
v,821
和α
v,822
分别为激光821和激光822在高温热管7内的吸光度;po是高温热管7测点处气相工质的总压;x
abs,o
是高温热管7测点处气相工质摩尔分数,即浓度;so是高温热管7测点处吸收谱线强度,so是气相工质的温度t单一变量的函数;φ是关于波长的线性函数;l
82
是热管第二光路82的吸收光程。
[0035]
基于免标定wms-2f/1f理论公式,对比第一半导体激光器41、第二半导体激光器42中高温热管7内气相工质的吸收强度并选择吸收强度较大的激光频率作为标准,分别针对热管第三光路83、热管第四光路84内不同频率的激光831和激光841获得r
2f/1f
信号值,如公式(3)和公式(4)。求解该公式获得气相工质的速度。已知高温热管7测点处的温度、压力、密度、速度和截面积,获得该测点处的质量流量。
[0036][0037][0038][0039]
式中,r
2f/1f,83
和r
2f/1f,84
分别是是热管第三光路83和热管第四光路84内具有较大吸收强度的激光的2f/1f信号值;io是具有较大吸收强度激光的激光器光强调制系数;v是具有较大吸收强度激光的激光器中心频率,a是具有较大吸收强度激光的激光器频率调制深度;θ是工作变量;u是气相工质速度;δv是垂直光路和锐角光路的两个r
2f/1f
的峰值频率差;c是光速;β是热管第三光路83和热管第四光路84之间的夹角;l
83
和l
84
分别为热管第三光路83和热管第四光路84内的吸收光程。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。