1.本发明涉及物联网和智慧城市领域,尤其涉及一种垃圾桶满溢监测方法。
背景技术:
2.社区垃圾桶一般是露天放置,经常出现垃圾溢出的现象,环卫工人需要定时巡逻查看桶内垃圾是否溢出,这就需要分配大量的工作人员来完成卫生清理工作,极其浪费人力和时间,而且稍不及时就经常出现垃圾满地乱跑的现象,严重影响着居民的生活环境。因此,设计一种垃圾桶满溢监测方法来管理小区内的垃圾已经成为了当前城市卫生管理的一项重要工作。
3.垃圾桶满溢监测方法,是由传感器感知技术、物联网传输技术和数据分析技术组合而成。在智慧城市和城市精细化管理领域,许多相关应用都是依靠此类技术来实现,比如水位探测技术,通过安装水位计感知水位高度数据,依靠物联网技术将数据传输给后台,利用一些模型和算法对数据进行分析,主要用于城市道路积水、湖泊、河流、水库等的水位检测;再比如烟雾探测技术,首先通过烟雾传感器探测到烟雾浓度数据,依赖物联网技术将数据传输到后台应用,利用模型或算法对烟感数据进行分析,以便于及时发现火灾风险并发出预警。
4.现有的垃圾桶满溢监测模型方法维度单一,难以对垃圾的满溢程度做出精准监测,以称重传感器为例,首先称重传感器会获取垃圾桶内的垃圾重量数据,通过重量数据的变化判断垃圾的满溢程度,然而垃圾的大小和重量不一,相同重量的垃圾所对应的垃圾满溢程度可能也不一样,因此,仅仅依靠称重传感器判断垃圾满溢程度是不够精确的;其次,现有的垃圾桶满溢监测方法都是实时监测,通过传感器采集实时数据,发现满溢风险后再做出报警,这时再派遣环卫人员进行清理,不能及时地发现满溢风险并预先做出处理;最后,现有的预警等级划分方式都是采用阈值法,通过设置静态阈值将预警等级划分为多个级别。然而,垃圾桶的性状千差万别,大小不一,因此,不同垃圾桶的阈值大小很难界定。
5.综上所述,设计一种垃圾桶满溢监测方法精准预测未来的满溢状态并作出不同级别的风险预警,是一个亟待解决的问题。
技术实现要素:
6.鉴于上述情况,本发明的目的在于提供一种垃圾桶满溢监测方法,能预测未来的垃圾满溢状态,并将其划分不同的满溢等级,帮助后台人员精准监控垃圾的状态,提升垃圾的收集效率,降低人力成本的投入,提高城市精细化管理的水平。
7.实现本发明目的的具体技术方案是:
8.一种垃圾桶满溢监测方法,所述方法包括以下具体步骤:
9.步骤1:获取垃圾桶内的垃圾高度时间序列数据和垃圾重量时间序列数据;
10.步骤2:对数据进行预处理,得到时间序列预测模型的输入与输出;按照时间步长t,从所述时间序列数据中选取数段长度为t的连续序列,作为所述时间序列预测模型的输
入序列(x1,x2,...,x
t
);将所述输入序列右移一步的数据作为所述时间序列预测模型的输出y;对数据进行归一化处理,并划分为训练集和测试集;
11.步骤3:训练所述时间序列预测模型,获得垃圾数据的预测值;所述时间序列预测模型由t个串联的记忆单元组成,所述的输入序列与记忆单元一一对应,将上一个记忆单元的输出h
i-1
和当前的输入xi输入到当前记忆单元中,得到下一个记忆单元的输出hi,最后一个记忆单元的输出h
t
,与实际输出y计算均方误差,重复上述过程,直到模型收敛为止;其中,将最后一个记忆单元的输出h
t
作为垃圾数据的预测值
12.步骤4:训练无监督聚类算法,将所述垃圾数据的预测值划分为不同的满溢等级;按照满溢等级k,初始化k个聚类中心,依次计算所述垃圾时间序列数据到每个聚类中心的距离,将所述垃圾时间序列数据划分到最近的聚类中心,根据每个聚类中心形成的类簇更新聚类中心;重复初始化以外的所有过程直至聚类中心不再更新为止;最后,将属于同一个聚类中心的垃圾时间序列数据划分为一个满溢等级;其中,所述聚类中心为垃圾重量数据和垃圾高度数据形成的一个坐标,所述类簇为多个垃圾高度数据与多个垃圾重量数据一一对应形成的不同坐标。
13.所述记忆单元,包括:
14.遗忘门、输入门和输出门;
15.遗忘门f
t
负责保留或者丢弃上一记忆单元的信息,将上一个记忆单元的输出信息h
t-1
和当前输入的信息x
t
同时传递到sigmoid激活函数中,输出值介于0和1之间,用于决定保留或者丢弃的程度,公式如下:
16.f
t
=σ(wf·
[h
t-1
,x
t
] bf)
[0017]
其中,σ(
·
)表示sigmoid激活函数,h
t-1
表示上一个记忆单元的输出信息,x
t
表示当前记忆单元的输入,wf表示训练参数矩阵,bf表示训练参数向量;
[0018]
输入门i
t
负责将当前输入的信息保留在当前记忆单元中,包括两部分,第一部分将上一个记忆单元的输出信息h
t-1
和当前输入的信息x
t
同时传递到sigmoid函数中,用来决定当前输入信息的重要程度;第二部分将上一个记忆单元的输出信息h
t-1
和当前输入的信息x
t
同时传递到tanh激活函数中,得到一个新的侯选值向量最后根据遗忘门f
t
和输入门i
t
更新当前记忆单元的状态c
t
,公式如下:
[0019]it
=σ(wi·
[h
t-1
,x
t
] bi)
[0020][0021][0022]
其中,tanh(
·
)表示tanh激活函数,wi和wc表示训练参数矩阵,bi和bc表示训练参数向量,表示候选值向量,c
t
表示当前记忆单元的状态,*表示内积运算;
[0023]
输出门o
t
用来确定当前记忆单元的输出,将上一个记忆单元的输出信息h
t-1
和当前输入x
t
传递到sigmoid函数中,然后将当前记忆单元的状态c
t
传递给tanh函数,最后将tanh的输出与sigmoid的输出o
t
相乘,公式如下:
[0024]ot
=σ(wo·
[h
t-1
,x
t
] bo)
[0025]ht
=o
t
*tanh(c
t
)
[0026]
其中,wo表示训练参数矩阵,bo表示训练参数向量。
[0027]
所述垃圾高度数据值是通过测距传感器周期性采集得到的;所述垃圾重量数据值是通过称重传感器周期性采集得到的。
[0028]
所述测距传感器为超声波传感器、红外线传感器或者激光传感器,安装于垃圾桶内顶部。
[0029]
所述称重传感器为间歇性静态称重传感器,安装于垃圾桶内底部。
[0030]
本发明通过测距传感器采集垃圾桶内的垃圾高度时间序列数据,通过称重传感器采集垃圾桶内的垃圾重量时间序列数据,基于所采集到的数据训练时间序列预测模型,预测未来的垃圾重量和高度数据,将其划分为对应的满溢等级,后台人员据此合理安排环卫工人在固定时间处理社区垃圾桶的残留垃圾,提高了垃圾清理效率,避免了人力资源的浪费。
[0031]
有益效果是,本发明提出了一种垃圾桶满溢监测方法,从高度和重量两个维度对垃圾满溢情况进行周期性监测;同时本发明采用无监督聚类算法划分满溢等级,便于后台人员判断满溢情况,并据此及时做出处理。
附图说明
[0032]
图1为本发明实施例的流程示意图;
[0033]
图2为本发明实施例提供的一种时间序列预测模型的示意图;
[0034]
图3为本发明实施例提供的满溢等级划分的流程示意图。
具体实施方式
[0035]
为了更好地理解上述技术方案,下面将结合说明书附图对本发明进行详细的描述,显然,所描述的实施例仅仅是本发明一部份实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0036]
本发明的一种垃圾桶满溢监测方法,包括:
[0037]
获取垃圾桶内的垃圾高度数据值和垃圾重量数据值;对数据进行预处理,形成垃圾高度时间序列数据和垃圾重量时间序列数据;训练时间序列预测模型,获得垃圾数据的预测值;训练无监督聚类算法,将所述垃圾数据的预测值划分为不同的满溢等级。
[0038]
通过测距传感器对垃圾箱内的垃圾高度进行数据测量,通过称重传感器采集垃圾桶内的垃圾重量数据,将所述测距传感器和所述称重传感器采集到的数据依靠物联网通信技术传输给后台。
[0039]
按照时间步长t,从所述时间序列数据中随机采样连续且长度等于时间步长t的数据,作为所述时间序列预测模型的输入,取当前时间段数据下一时刻的数据作为所述时间序列预测模型的输出。
[0040]
根据预测步长将预测方式分为单步预测和多步预测。单步预测是指预测下一时间步长的数据值,多步预测是指预测未来多个时间步长的数据。
[0041]
所述多步预测可以采用直接多步预测,分别选用时间步长为1到n的数据作为所述时间序列预测模型的输出,训练n个模型用于预测;所述多步预测还可以采用迭代多步预
测,仅需要一个模型,先预测出第1个时间步长的数据,将其作为已知特征,继续预测第2个时间步长的数据,以此类推,可以得到第n个时间步长的数据。
[0042]
所述时间序列预测模型由多个串联的记忆单元组成;所述记忆单元由遗忘门、输入门和输出门组成。
[0043]
所述无监督聚类模型按照满溢等级k,初始化k个聚类中心,所述聚类中心为垃圾重量数据和垃圾高度数据形成的一个坐标;依次计算所述垃圾时间序列数据到每个聚类中心的距离,将所述垃圾时间序列数据划分到最近的聚类中心;根据每个聚类中心形成的类簇更新聚类中心,所述类簇为多个垃圾高度数据与多个垃圾重量数据一一对应形成的不同坐标;重复初始化以外的所有步骤直至聚类中心不再更新为止;最后,将属于同一个聚类中心的垃圾时间序列数据划分为一个满溢等级。
[0044]
实施例
[0045]
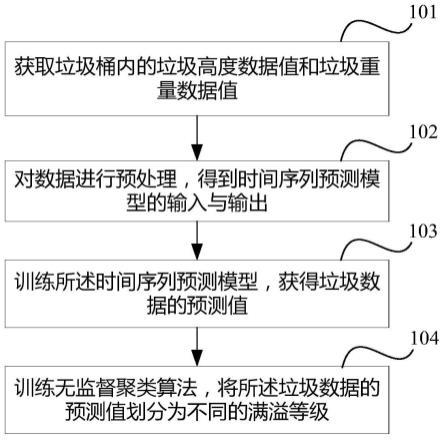
参阅图1,为本实施例的流程示意图,其流程具体包括:
[0046]
步骤101:获取垃圾桶内的垃圾高度数据值和垃圾重量数据值。
[0047]
通过测距传感器周期性地测量垃圾桶内的垃圾高度数据,获取垃圾高度时间序列数据;通过称重传感器周期性地采集垃圾桶内的垃圾重量数据,获取垃圾重量时间序列数据。其中,所述测距传感器包括但不限于超声波传感器、红外线传感器和激光测距传感器,通过信号发送和传回的时间计算垃圾桶内剩余空间的高度,用垃圾桶的总高度减去所述垃圾桶内剩余空间的高度,获得垃圾桶内垃圾的高度;所述称重传感器为间隙性静态称重传感器,将质量信号转变为可测量的电信号输出。
[0048]
步骤102:对数据进行预处理,得到时间序列预测模型的输入与输出。
[0049]
确定时间序列预测模型的输入和输出。所述垃圾时间序列数据为{x1,x2,x3,...,xn},按照时间步长t,从所述垃圾时间序列数据中随机采样m组连续数据,},按照时间步长t,从所述垃圾时间序列数据中随机采样m组连续数据,作为所述垃圾时间序列预测模型的输入,作为所述时间垃圾时间序列预测模型的输出。
[0050]
对所述测距传感器和所述称重传感器采集的数据进行数据归一化,将数据映射到[0,1]之间。数据归一化处理的公式如下:
[0051][0052]
其中,x
i*
为xi归一化后的数据值,x
max
为数据中的最大值,x
min
为数据集中的最小值;
[0053]
划分训练集和测试集。随机选择80%的数据作为所述时间序列预测模型的训练集,20%的数据作为所述时间序列预测模型的测试集。需要注意的是,划分数据集的比例不是固定的,这里只作为一种实施例进行说明。
[0054]
步骤103:训练所述时间序列预测模型,获得垃圾数据的预测值。
[0055]
参阅图2,为本实施例提供的一种时间序列预测模型的示意图。
[0056]
所述训练单元的输出为{h1,h2,...,h
t
}。以第t个训练单元为例,第t个训练单元以当前的输入x
t
和上一个训练单元的输出h
t-1
作为输入,获得h
t
作为输出。最后一个训练单元的输出h
t
作为下一时刻的垃圾数据的预测值,与所述时间垃圾高度时间序列预测模型的输
出y进行比较,计算均方根误差rmse,反向传播误差,多次训练模型直至拟合为止。均方根误差rmse的计算公式如下:
[0057][0058]
其中,m为训练样本的数量,yi为第i个训练样本的实际值,为第i个训练样本的预测值,即h
t
;
[0059]
在所述测试集上验证所述时间序列模型的效果,绘制散列图,判断实际数据和预测数据是否成正相关,计算拟合优度。
[0060]
一种可选的实施方式中,所述时间序列预测模型由至少一个记忆单元组成;所述记忆单元由遗忘门、输入门和输出门三个门控单元组成。
[0061]
遗忘门f
t
负责保留或者丢弃上一记忆单元的信息,将上一个记忆单元的输出信息h
t-1
和当前输入的信息x
t
同时传递到sigmoid激活函数中,输出值介于0和1之间,用于决定保留或者丢弃的程度,公式如下:
[0062]ft
=σ(wf·
[h
t-1
,x
t
] bf)
[0063]
其中,σ(
·
)表示sigmoid激活函数,h
t-1
表示上一个记忆单元的输出信息,x
t
表示当前记忆单元的输入,wf表示训练参数矩阵,bf表示训练参数向量;
[0064]
输入门i
t
负责将当前输入的信息保留在当前记忆单元中,包括两部分,第一部分将上一个记忆单元的输出信息h
t-1
和当前输入的信息x
t
同时传递到sigmoid函数中,用来决定当前输入信息的重要程度;第二部分将上一个记忆单元的输出信息h
t-1
和当前输入的信息x
t
同时传递到tanh激活函数中,得到一个新的侯选值向量最后根据遗忘门f
t
和输入门i
t
更新当前记忆单元的状态c
t
,公式如下:
[0065]it
=σ(wi·
[h
t-1
,x
t
] bi)
[0066][0067][0068]
其中,tanh(
·
)表示tanh激活函数,wi和wc表示训练参数矩阵,bi和bc表示训练参数向量,表示候选值向量,c
t
表示当前记忆单元的状态,*表示内积运算;
[0069]
输出门o
t
用来确定当前记忆单元的输出,将上一个记忆单元的输出信息h
t-1
和当前输入x
t
传递到sigmoid函数中,然后将当前记忆单元的状态c
t
传递给tanh函数,最后将tanh的输出与sigmoid的输出o
t
相乘,公式如下:
[0070]ot
=σ(wo·
[h
t-1
,x
t
] bo)
[0071]ht
=o
t
*tanh(c
t
)
[0072]
其中,wo表示训练参数矩阵,bo表示训练参数向量。
[0073]
步骤104:训练无监督聚类算法,将垃圾数据的预测值划分为不同的满溢等级。
[0074]
参阅图3,为本实施例提供的满溢等级划分的流程示意图。
[0075]
假定给定数据样本x,包含了n个对象x={x1,x2,...,xn},其中每个对象都具有m个
维度的属性,这里m为2,对应垃圾重量和垃圾高度;
[0076]
步骤301:首先需要初始化k个聚类中心{c1,c2,...,ck},k是人为设定的,对应了k种分类等级。
[0077]
步骤302:分别计算每一个对象到每一个聚类中心的欧式距离。
[0078][0079]
其中,xi表示第i个对象1≤i≤n,ci表示第j个聚类中心1≤j≤k,x
it
表示第i个对象的第t个属性1≤t≤m,c
jt
表示第j个对象的第t个属性。
[0080]
步骤303:依次比较每一个对象到每一个聚类中心的距离,将对象分配到距离最近的聚类中心的类簇中,得到k个类簇{s1,s2,...,sk}。
[0081]
步骤304:通过求类簇内所有对象的均值,更新每个类簇的聚类中心。
[0082][0083]
其中,c
l
表示第l个聚类中心1≤l≤k,|s
l
|表示第l个聚类中心中对象的个数,xi表示第l个类簇中第i个对象1≤i≤|s
l
|。
[0084]
迭代执行步骤302、步骤303和步骤304,直到所有聚类中心均不再更新为止。
[0085]
综上所述,本实施例能够解决现有方法在垃圾满溢状态监测方面不够精准和满溢预警等级划分不够智能的问题,从而实现对垃圾满溢状态的精准预测、垃圾满溢预警等级的合理划分。
[0086]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。