1.本发明属于道路网拓扑修正的技术领域,具体涉及一种提取路网拓扑修正方法。
背景技术:
2.快速准确地获取道路数据,有利于政府部门对紧急事件的响应和人们的日常出行,而且对于自动驾驶等前沿研究具有十分重要的意义。传统的人工测量方法虽然可以获得较为准确的道路信息,但是采集数据的过程较为繁琐,工作量大,十分耗时。随着深度学习技术的不断发展,基于深度学习的遥感影像路网提取技术现已逐渐成熟,这种获取路网的方法也已成为全球路网数据生产的主要方法之一。但是由于各种因素,提取路网存在拓扑缺失的问题,难以实际应用。因此,需要对提取路网进行拓扑修正。
3.现有的道路网拓扑修正方法虽然可以在一定程度上解决提取路网拓扑不完善的问题,但是由于没有参考数据,不能较好地修复比较复杂的道路。而且在对拓扑缺失的道路进行补充时,通常使用直线形状的道路。然而,实际道路的形状多种多样,直线形状的道路显然不能很好地和实际道路拟合。
技术实现要素:
4.本发明的目的在于针对现有技术的不足之处,提供一种提取路网拓扑修正方法,该方法在有无参考数据的情况下均能对不同形状的道路进行拟合,解决了不同场景下提取路网拓扑修正的问题。
5.为解决上述技术问题,本发明采用如下技术方案:
6.一种基于方向延伸和端点匹配的提取路网拓扑修正方法,适用于提取路网在无参考数据下的拓扑修正,包括如下步骤:
7.步骤1,对提取路网数据进行预处理;
8.步骤2,从预处理后的提取路网数据中筛选道路端点候选集;
9.步骤3,方向指标提取:遍历道路端点候选集,计算道路端点所在道路与道路端点连线的夹角,即起始角a
from
和终止角a
to
;
10.步骤4,距离指标提取:遍历道路端点候选集,根据步骤3中的起始角a
from
和终止角a
to
计算两个道路端点间的横向距离d
l
和纵向距离d
t
;
11.步骤5,使用层次分析法分析和计算端点匹配指标的权值,并结合步骤3的方向指标和步骤4的距离指标构建端点匹配模型以计算端点匹配度;
12.步骤6,遍历道路端点候选集,计算端点匹配度,选取并连接端点匹配度最大的端点对提取路网进行拓扑修正。
13.进一步地,步骤1中预处理包括对提取路网数据中未聚合道路交叉口进行节点聚合,并对道路碎段和道路两端凸起进行去除。
14.进一步地,步骤2的具体实现方式如下:
15.对于每一个道路端点,如果为悬挂端点,则以x米为延伸距离不断进行延伸;在每
次延伸后,以x米为缓冲区半径建立缓冲区,筛选落入缓冲区内的端点候选集;重复上述过程,直至延伸次数达到n,如果延伸过程中与其他道路相交,则不再延伸;保留每次延伸过程中的端点候选集,即为最终的端点候选集。
16.进一步地,步骤3中起始角、终止角的计算公式如下:
[0017][0018][0019]
其中,a
from
为起始角,为起始道路l1的方向角,a
conn
为道路端点连线的方向角,a
to
为终止角,为终止道路l2的方向角。
[0020]
进一步地,步骤4中横向距离和纵向距离的计算公式如下:
[0021][0022][0023]
其中,d为道路端点的欧氏距离,a
from
为步骤3中的起始角,a
to
为步骤3中的终止角。
[0024]
进一步地,步骤5的具体实现方式如下:
[0025]
s5.1、对所要解决的问题进行描述,建立相应的层次分析模型;
[0026]
s5.2、分析各个匹配指标的相对重要性,构建判断矩阵;
[0027]
s5.3、根据判断矩阵计算匹配指标权值;
[0028]
s5.4、检查判断矩阵的一致性;
[0029]
s5.5、构建端点匹配模型以计算端点匹配度,端点匹配模型的计算公式如下:
[0030][0031]
其中,和分别为横向距离和纵向距离的权重,pa为起始角和终止角的权重和;和分别为横向距离和纵向距离的阈值,a
max
为起始角和终止角的阈值和。
[0032]
一种基于众源路网和几何匹配的提取路网拓扑修正方法,适用于提取路网在有参考数据下的拓扑修正,包括以下步骤:
[0033]
步骤1,对osm路网与提取路网数据进行预处理;
[0034]
步骤2,从预处理后的数据中获取道路网匹配关系;
[0035]
步骤3,根据道路网匹配关系,拓扑修正归属相同众源道路的提取道路间的拓扑缺失;
[0036]
步骤4,根据道路网匹配关系,拓扑修正归属不同众源道路的提取道路间的拓扑缺失。
[0037]
进一步地,所述步骤1包括如下子步骤:
[0038]
s1.1、构建osm路网stroke;
[0039]
s1.2、对提取路网进行打断。
[0040]
进一步地,步骤s1.1的具体包括:
[0041]
s1.1.1、顺序选取osm路网数据中的一条道路,如果该条道路没有与其他道路组成道路stroke,使用其初始化新道路stroke;
[0042]
s1.1.2、筛选与道路端点相交的道路,组成候选道路集合;
[0043]
s1.1.3、遍历候选道路集合,剔除与起始道路的道路类别不同的道路;
[0044]
s1.1.4、遍历候选道路集合,计算候选道路与起始道路的弧段夹角,选取弧段夹角最大的候选道路;
[0045]
s1.1.5、判断最大弧段夹角是否大于弧段夹角阈值,如果大于所设定的弧段夹角阈值,使用该道路更新道路stroke;
[0046]
s1.1.6、循环s1.1.2至s1.1.5,直至该条道路stroke构建完毕;
[0047]
s1.1.7、循环上述步骤,直至道路网stroke构建完毕。
[0048]
10、根据权利要求8所述的基于众源路网和几何匹配的拓扑修正方法,其特征在于,步骤s1.2包括:
[0049]
s1.2.1,循环读取osm路网数据,获取osm路网中的osm道路端点集合;
[0050]
s1.2.2,循环osm路网的道路端点集合,顺序读取一个端点,并以该端点为缓冲区中心,x米为缓冲区半径建立缓冲区,从提取路网中筛选落入缓冲区内的提取道路及提取道路端点;
[0051]
s1.2.3,如果有提取道路端点落入缓冲区内,计算端点到提取道路的垂点,将提取道路在垂点处打断;
[0052]
s1.2.4,如果没有提取道路端点落入缓冲区内,则从中选取距离端点最近的提取道路,计算端点到提取道路的垂点,将提取道路在垂点处打断。
[0053]
进一步地,步骤2中获取道路网匹配关系的方法为:
[0054]
s2.1、对于提取路网数据集中的每一条道路,首先建立该条道路的缓冲区buffer,然后从osm路网中筛选落入缓冲区buffer的道路候选集;
[0055]
s2.2、遍历道路候选集,对每条道路进行节点加密,对于每一个道路匹配对,从较短道路中选取一个节点,计算出此节点到较长道路所有节点的距离最小值,其中值即为sm_hd;
[0056]
s2.3、对于每一个道路匹配对,分别建立道路的最小面积外接矩形,获取最小面积外接矩形对角线并计算其方向角,两条道路的对应方向角之差即为angle_dif;
[0057]
s2.4、对于每一个道路匹配对,分别建立道路缓冲区,缓冲区半径设为sm_hd,两个道路缓冲区交集面积与并集面积的比值即为overlap;
[0058]
s2.5、使用层次分析法分析和计算相似性特征因子的权值,并根据sm_hd、angle_dif以及overlap构建道路网匹配模型以计算综合匹配度;
[0059]
s2.6、遍历道路匹配对,计算综合匹配度,记录综合匹配度最大的道路匹配对。
[0060]
进一步地,步骤s2.5具体实现方法如下:
[0061]
s2.5.1,对所要解决的问题进行描述,并建立相应的层次分析模型;
[0062]
s2.5.2,分析各个相似性特征指标的相对重要性,并构建判断矩阵;
[0063]
s2.5.3,根据判断矩阵计算匹配指标权值;
[0064]
s2.5.4,检查判断矩阵的一致性;
[0065]
s2.5.5,构建网道路匹配模型以计算综合匹配度,其中,道路网匹配模型为:
[0066][0067]
式中,p
sm_hd
为距离相似性特征因子的权值,p
angle_dif
为方向相似性特征因子的权值,p
overlap
为重叠度相似性特征因子的权值,m_sm_hd和m_angle_dif分别为距离相似性特征因子和方向相似性特征因子的阈值。
[0068]
进一步地,步骤3具体方法为:
[0069]
s3.1、计算道路匹配段,获取拓扑缺失段;
[0070]
s3.2、分别计算缺失段道路的起点p1到osm道路的距离l1以及终点p2到osm道路的距离l2;
[0071]
s3.3、设起点p1、终点p2到osm道路的垂足分别对应为点b1、b2,将osm道路上落入b1b2路段的所有节点加入节点集合,设节点集合为{ai,i∈{1,2,...,n}};
[0072]
s3.4、计算距离l2与距离l1的差值δl;
[0073]
s3.5、将差值δl按照长度分配到节点集合中所有节点的缩放距离上,对于每个节点ai,计算该节点的缩放距离li,具体公式为:
[0074][0075]
其中,dis(b1b2)为路段b1b2的长度,dis(b1ai)为路段b1ai的长度;
[0076]
s3.6、临摹道路上对应节点的坐标,具体计算公式为:
[0077][0078]
其中,向量和向量分别为路段b
ibi-1
和路段b
ibi 1
的单位向量,θ为其夹角,bi为原始道路的节点,qi为临摹后道路的节点。
[0079]
进一步地,步骤4具体包括以下子步骤:
[0080]
s4.1、提取osm道路交叉口,记录组成该道路交叉口的道路信息;
[0081]
s4.2、顺序选取一个osm道路交叉口,获取对应的提取道路交叉口的组成道路信息;
[0082]
s4.3、从提取道路中获取提取道路端点,如果提取道路端点为同一点,则不对其进行处理,否则进入下一步;
[0083]
s4.4、逐个计算提取道路端点与osm道路交叉口点的距离,筛选距离小于阈值的提取道路端点并计算中心点坐标;
[0084]
s4.5、对于距离小于阈值的提取道路端点所在的道路,进行节点聚合;对于距离大于阈值的提取道路端点所在的道路,以道路端点为起点,聚合中心点为终点,进行道路临摹。
[0085]
与现有技术相比,本发明的有益效果为:
[0086]
(1)本发明提供的提取路网拓扑修正方法,该方法在有无参考数据的情况下均能对不同形状的道路进行拟合,解决了不同场景下提取路网拓扑修正的问题,大大提高了遥
感影像自动提取路网的拓扑完整性;
[0087]
(2)本发明的基于方向延伸和端点匹配的提取路线拓扑修正方法通过使用方向延伸算法提高了算法的效率,通过使用层次分析法在一定程度上避免了人工经验值带来的影响;
[0088]
(3)本发明的基于众源路网和几何匹配的拓扑修正方法引入osm路网大大提高了拓扑修正效果,通过使用多因子几何匹配模型和层次分析法计算权重获取道路网匹配关系,增加了几何匹配的准确性;通过使用道路临摹算法使得拓扑修正道路与实际道路拟合,更加符合人类视觉感知。
附图说明
[0089]
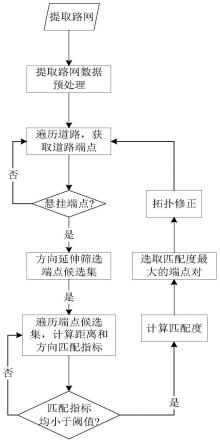
图1为本发明实施例基于方向延伸和端点匹配的提取路网拓扑修正流程图;
[0090]
图2为本发明实施例中使用方向延伸算法筛选端点候选集的示意图,每次延伸距离设置为x米;
[0091]
图3为本发明实施例中端点匹配指标的示意图;其中,line_1和line_2分别为端点p1和端点p2所在的道路;pm为端点p1和端点p2连线的中点;p
v1
和p
v2
分别为中点pm到两条直线的垂点;d
l1
和d
l2
为横向距离;d
t1
和d
t2
为纵向距离;a
from
和a
to
分别为道路line_1和道路line_2与端点连线的夹角;
[0092]
图4为本发明实施例基于方向延伸和端点匹配的拓扑修正示意图;其中,(a)为原始提取路网,(b)为拓扑修正提取路网;
[0093]
图5为本发明实施例基于众源路网和几何匹配的提取路网拓扑修正流程图;
[0094]
图6为本发明实施例中提取路网中某条道路使用缓冲区增长法的示意图,从osm路网中筛选道路候选集;其中,a1为提取路网的一条道路,b1和b2分别为osm路网中与道路a1建立的缓冲区相交的道路,即为道路候选集;
[0095]
图7为本发明实施例中道路节点加密前后道路距离计算结果的示意图,节点加密前两条道路的距离为28.3m,节点加密后两条道路的距离为20m;
[0096]
图8为本发明实施例中两条道路的最小面积外接矩形对角线方向角差值计算的示意图;
[0097]
图9为本发明实施例中两条道路缓冲区交集面积与并集面积比值计算示意图,其中,黑色区域为缓冲区交集,灰色区域为缓冲区并集;
[0098]
图10为本发明实施例基于众源路网和几何匹配的拓扑修正示意图;其中,(a)为osm路网,(b)为原始提取路网,(c)为拓扑修正提取路网。
具体实施方式
[0099]
下面将结合本发明实施例对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0100]
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
[0101]
下面结合具体实施例对本发明作进一步说明,但不作为本发明的限定。
[0102]
本发明实施例提供的路网拓扑修正方法包括一种基于方向延伸和端点匹配的提取路网数拓扑修正方法以及基于众源路网和几何匹配的提取路网拓扑修正方法,其中,基于方向延伸和端点匹配的提取路网数拓扑修正方法,适用于提取路网在无参考数据下的拓扑修正;而基于众源路网和几何匹配的提取路网拓扑修正方法,适用于提取路网在有参考数据下的拓扑修正。
[0103]
实施例1
[0104]
如图1所示,本实施例提供了一种基于方向延伸和端点匹配的提取路网数拓扑修正方法,包括如下步骤:
[0105]
步骤1:对提取路网数据预处理,排除无关因素对结果的影响,便于后续过程的进行;具体地,本实例数据预处理的过程包括:对未聚合道路交叉口进行节点聚合、对道路碎段进行去除、对道路两端凸起进行去除。
[0106]
步骤2,基于方向延伸算法从步骤1中预处理后的提取路网数据中筛选道路端点候选集;该步骤具体包括如下子步骤:
[0107]
s2.1、从提取路网中提取所有道路端点;
[0108]
s2.2、遍历道路端点,判断是否为悬挂端点,如果为是,则进入下一步;
[0109]
s2.3、记道路延伸次数n为零,单次延伸距离为x米;
[0110]
s2.4、以道路端点为起始点,n*x米为延伸距离,获取延伸后的新道路端点。以新道路端点为缓冲区中心,x米为缓冲区半径,建立缓冲区,筛选落入缓冲区内的道路端点;
[0111]
s2.5、道路延伸次数n 1;
[0112]
s2.6、循环步骤s2.3至步骤s2.5,直至延伸次数达到n次,保留每次延伸过程中的端点候选集,即可得到最终的端点候选集。在延伸过程中,如果与其他道路相交,需要退出;
[0113]
在本实例中,道路端点单次方向延伸距离和缓冲区半径x=10米,最大延伸次数n=5,其中,x、n的取值可根据需要选择其他数值,延伸方法如图2所示,该图为端点延伸的示意图;
[0114]
步骤3,方向指标提取:遍历道路端点候选集,计算道路端点所在道路与道路端点连线的夹角,即起始角a
from
和终止角a
to
;其中,起始角a
from
和终止角a
to
如图3所示,其计算公式如下:
[0115][0116][0117]
其中,为起始道路l1的方向角,a
conn
为道路端点连线的方向角,为终止道路l2的方向角。
[0118]
步骤4,距离指标提取:遍历道路端点候选集,计算两个道路端点间的横向距离d
l
和纵向距离d
t
;本实施例中,横向距离d
l
和纵向距离d
t
如图3所示,计算公式如下:
[0119][0120]
[0121]
其中,d为道路端点的欧氏距离,a
from
和a
to
分别为步骤c中的起始角和终止角。
[0122]
步骤5,使用层次分析法分析和计算端点匹配指标的权值,结合步骤3的方向指标和步骤4的距离指标构建端点匹配模型以计算端点匹配度;其中,该步骤具体包括:
[0123]
s5.1、对所要解决的问题进行描述,在本实施例中,所要解决的问题为如何为端点匹配模型提供合适的权值,并根据该问题建立相应的层次分析模型;
[0124]
s5.2、根据层次分析模型分析各个匹配指标的相对重要性,构建判断矩阵;任何两个匹配指标的相对重要性介于1-9,数值越大,重要性程度越高,一般根据需要预设;在本实施例中,使用两两匹配指标的相对重要性构造判断矩阵;
[0125]
s5.3、根据判断矩阵计算匹配指标权值;
[0126]
s5.4、检查判断矩阵的一致性,在本实施例中根据判断矩阵计算检验系数cr,如果小于0.01,则通过一致性检验;
[0127]
s5.5、根据判断矩阵的一致性结果确定可被使用的匹配指标权值,即通过了一致性检验则可以确定为可被使用的匹配指标,并根据确定的可被使用的匹配指标权值构建端点匹配模型以计算端点匹配度,端点匹配模型为:
[0128][0129]
其中,分别对应为横向距离和纵向距离的权重,pa为起始角和终止角的权重和;分别对应为横向距离和纵向距离的阈值,amax为起始角和终止角的阈值和;
[0130]
本实例中,pa=0.4770,a
max
=π,上述参数取值并不限于对本发明进行限定,可以根据实际需要选择相应的数值。
[0131]
步骤6,遍历道路端点候选集,根据上述端点匹配模型计算端点匹配度,选取并连接端点匹配度最大的端点对提取路网进行拓扑修正,拓扑修正结果如图4所示。
[0132]
实施例2
[0133]
如图5所示,本实施例提供基于众源路网和几何匹配的提取路网拓扑修正方法,适用于提取路网在有参考数据下的拓扑修正,包括:
[0134]
步骤1,对osm路网与提取路网的数据进行预处理;如图6所示,该步骤包括:
[0135]
s1.1、osm路网stroke构建;其具体实现方式如下,
[0136]
第一步,读取osm路网数据,获取几何信息与语义信息,其中,几何信息包括道路各个节点坐标,语义信息包括道路类别;
[0137]
第二步,顺序选取osm路网数据中的一条道路,如果该条道路没有与其他道路组成道路stroke,使用其初始化新道路stroke;
[0138]
第三步,筛选与道路端点相交的道路,组成候选道路集合;
[0139]
第四步,遍历候选道路集合,剔除与起始道路的道路类别不同的道路;
[0140]
第五步,遍历候选道路集合,计算候选道路与起始道路的弧段夹角,选取弧段夹角最大的候选道路;
[0141]
第六步,判断最大弧段夹角是否大于弧段夹角阈值,如果大于所设定的弧段夹角
阈值,使用该道路更新道路stroke;在本实施例中,弧段夹角阈值可以为120度,当然在别的实施例中,也可以根据实际需要选择别的角度;
[0142]
第七步,循环第三步至第四步,直至该条道路stroke构建完毕;
[0143]
第八步,循环第二步,直至道路网stroke构建完毕。
[0144]
s1.2、对提取路网进行打断,其实现方式如下:
[0145]
第一步,获取osm路网的道路端点集合;
[0146]
第二步,循环osm路网的道路端点集合,顺序读取一个端点。以该端点为缓冲区中心,x米为缓冲区半径建立缓冲区(在本实施例中,缓冲区半径x取值10米),从提取路网中筛选落入缓冲区内的提取道路及提取道路端点;
[0147]
第三步,如果没有提取道路端点落入缓冲区内,则返回第二步,否则进入第四步;
[0148]
第四步,循环落入缓冲区内的提取道路,计算端点到提取道路的距离。选取距离最近的提取道路,计算端点到提取道路的垂点,将提取道路在垂点处打断。
[0149]
步骤2,获取道路网匹配关系;该步骤具体包括如下子步骤:
[0150]
s2-1、对于提取路网数据集中的每一条道路,首先建立该条道路的缓冲区buffer,然后从osm路网中筛选落入缓冲区buffer的道路候选集;
[0151]
s2-2、遍历道路候选集,对每条道路进行节点,如图7所示;其中,在本实施例中,加密道路节点加密距离设置为5米。对于每一个道路匹配对,从较短道路中选取一个节点,计算出此节点到较长道路所有节点的距离最小值,其中值即为sm hd(the short-line median hausdorffdistance),sm hd的计算公式如下:
[0152][0153]
其中,a为道路a的节点,b为道路b的节点,道路a的长度小于道路b的长度;
[0154]
s2-3、对于每一个道路匹配对,分别建立道路的最小面积外接矩形,获取最小面积外接矩形对角线并计算其方向角,见图8;两条道路的对应方向角之差即为angle_dif,angle_dif的计算公式如下,
[0155]
angle_dif=abs(angle-a-angle_b)
[0156]
其中,angle_a和angle_b分别为道路a和道路b最小面积外接矩形对角线方向角;
[0157]
s2-4、对于每一个道路匹配对,分别建立道路缓冲区,缓冲区半径设为sm_hd,两个道路缓冲区交集面积与并集面积的比值即为overlap,见图9,overlap的计算公式如下,
[0158][0159]
其中,buffera和bufferb分别为道路a和道路b建立的缓冲区;
[0160]
s2.5、使用层次分析法分析和计算相似性特征因子的权值,并根据sm_hd、angle_dif以及overlap构建道路网匹配模型以计算综合匹配度;该步骤与实施例一类似,包括如下子步骤:
[0161]
s5.1、对所要解决的问题进行描述,在本实施例中,所要解决的问题为如何为端点匹配模型提供合适的权值,并根据该问题建立相应的层次分析模型;
[0162]
s5.2、根据层次分析模型分析各个匹配指标的相对重要性,构建判断矩阵;任何两个匹配指标的相对重要性介于1-9,数值越大,重要性程度越高,一般根据需要预设;在本实
施例中,使用两两匹配指标的相对重要性构造判断矩阵;
[0163]
s5.3、根据判断矩阵计算匹配指标权值;
[0164]
s5.4、检查判断矩阵的一致性,在本实施例中根据判断矩阵计算检验系数cr,如果小于0.01,则通过一致性检验;
[0165]
s5.5、根据判断矩阵的一致性结果确定可被使用的匹配指标权值,即通过了一致性检验则可以确定为可被使用的匹配指标,并根据确定可被使用的匹配指标权值构建道路网匹配模型以计算综合匹配度,道路网匹配模型的计算公式如下:
[0166][0167]
式中,p
sm_hd
为距离相似性特征因子的权值,p
angle_dif
为方向相似性特征因子的权值,p
overlap
为重叠度相似性特征因子的权值,m-sm-hd和m-angle_dif分别为距离相似性特征因子和方向相似性特征因子的阈值。
[0168]
步骤3,根据道路网匹配关系,拓扑修正归属相同众源道路的提取道路间的拓扑缺失;其中,包括:
[0169]
s3-1、计算道路匹配段,获取拓扑缺失段;
[0170]
s3-2、使用道路临摹算法对拓扑缺失段进行补充;具体地:
[0171]
第一步,分别计算缺失段道路的起点p1、终点p2到osm道路的距离l1、l2。如果端点位于osm道路的左侧,本文将距离设为正值,否则设为负值;
[0172]
第二步,设起点p1、终点p2到osm道路的分别垂足为点b1、b2,将osm道路上落入b1b2路段的所有节点加入节点集合,设节点集合为{ai,i∈{1,2,...,n}};
[0173]
第三步,计算距离l2与距离l1的差值δl;
[0174]
第四步,将差值δl按照长度分配到节点集合中所有节点的缩放距离上。对于每个节点ai,使用以下公式计算该节点的缩放距离li;
[0175][0176]
其中,dis(b1b2)为路段b1b2的长度,dis(b1ai)为路段b1ai的长度;
[0177]
第五步,使用以下公式便可得到临摹道路上对应节点的坐标:
[0178][0179]
其中,向量向量分别对应为路段b
ibi-1
、路段b
ibi 1
的单位向量,θ为其夹角,bi为原始道路的节点,qi为临摹后道路的节点。
[0180]
步骤4,根据道路网匹配关系,拓扑修正归属不同众源道路的提取道路间的拓扑缺失;该步骤包括:
[0181]
s4-1、提取osm道路交叉口,记录组成该道路交叉口的道路信息;
[0182]
s4-2、将osm道路交叉口作为基准,根据道路网匹配关系,对提取路网中对应的道路交叉口进行拓扑修正;具体地,
[0183]
第一步,顺序选取一个osm道路交叉口,根据道路网匹配关系,可以很容易获取对
应的提取道路交叉口的组成道路信息;
[0184]
第二步,从提取道路中获取提取道路端点,如果提取道路端点为同一点,则不对其进行处理,否则进入下一步;
[0185]
第三步,逐个计算提取道路端点与osm道路交叉口点的距离,筛选距离小于阈值的提取道路端点并计算中心点坐标;
[0186]
第四步,对于距离小于阈值的提取道路端点所在的道路,进行节点聚合;对于距离大于阈值的提取道路端点所在的道路,以道路端点为起点,聚合中心点为终点,进行道路临摹。其中,阈值可设置为10米。本实施例中,对提取路网的拓扑修正结果如图10所示。
[0187]
以上仅为本发明较佳的实施例,并非因此限制本发明的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本发明说明书内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本发明的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
