1.本发明涉及护砌施工技术领域,尤其涉及一种适用于城市水网生态护砌的铺砖设备及铺设方法。
背景技术:
2.通常在城市水网的整治工程中,对生态系统冲击最大的影响因素是水陆交错带的岸坡防护结构。现有的岸坡防护结构以生态护砌为主,生态护砌可采用预制混凝土护砌块、土工格栅、草皮结构与低矮灌木结合,使河道具有防洪、休闲和亲水功能。在传统的生态护砌铺设作业中,一般由人工在河道斜坡上进行生态护砌的铺设,该种人工铺设生态护砌的方式不光铺设效率低,对铺设工人的经验要求也较高,同时在河道岸边容易发生溺水,因此施工安全性极低。在现有技术中,出现了在护坡砌块铺设过程中的机械化作业。如申请号为cn202010216963.0的中国专利“一种砌石坝机械化施工方法”中,公开了在料石运输和摆石的两个重要环节中实现了机械化作业,节省了大量人工作业的工作量,减少人为的施工质量波动。但是在该技术方案中,仍需要人工进行铺设砂浆和勾缝等操作,因此仍然无法完全避免人工作业过程中的安全性问题,同时需要人工操作抓铲挖掘机进行摆石,受限于操作人员的操作水平,无法保证摆石过程中的铺设精确度。
技术实现要素:
3.针对现有技术存在的不足,本发明的目的在于提供一种适用于城市水网生态护砌的铺砖设备及铺设方法,用于实现全自动铺设生态护砌,提升铺设作业质量和安全性。
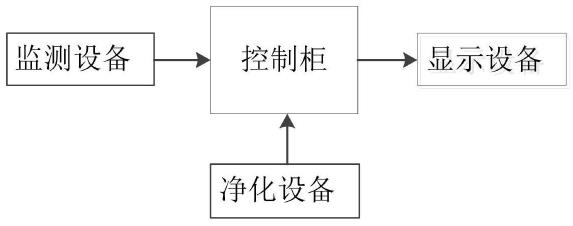
4.为实现上述目的,本发明提供了如下技术方案:一种适用于城市水网生态护砌的铺砖设备,包括运输装置、装料斗、泥浆桶、护砌装夹机构和用于检测河道坡面综合坡度的坡度检测装置,所述装料斗、所述泥浆桶、所述护砌装夹机构和坡度检测装置均固定设置在所述运输装置上端;所述装料斗内设有若干生态护砌,所述生态护砌中部开设有孔洞;所述泥浆桶通过导管连接一抽浆泵的输入端,所述抽浆泵的输出端连接一主导管;所述护砌装夹机构包括运动部件、夹持组件和控制器,所述运动部件固定在所述运输装置上端,所述夹持组件固定在所述运动部件远离所述运输装置一端,所述控制器电连接所述抽浆泵、所述运动部件、所述夹持组件和所述坡度检测装置;
5.所述夹持组件包括若干机械爪,各所述机械爪之间设有连通所述主导管的喷浆枪头,所述夹持组件与所述摆动组件之间设有用于检测所述河道坡面对各所述机械爪反馈力的压力传感器,所述机械爪的外壁上安装有用于拍摄所述河道坡面实时图像的图像采集装置,所述图像采集装置电连接所述控制器,所述控制器控制所述运动部件带动所述夹持组件移动以夹持所述生态护砌至所述河道坡面,控制所述抽浆泵将泥浆泵入所述喷浆枪头以贯穿所述孔洞对所述河道坡面喷浆,以及根据所述实时图像、所述综合坡度和所述反馈力调整各所述机械爪对所述生态护砌的夹持角度和按压力度。
6.进一步地,同一竖直平面上的所述机械爪的外壁上安装有用于检测所述机械爪与
所述河道坡面之间相对距离的距离传感器,则所述控制器包括:
7.第一计算单元,用于计算每对所述相对距离之间的距离阈值;
8.第一处理单元,用于根据所述生态护砌的尺寸将所述实时图像预先划分为若干图像块,并根据预设图像识别算法识别得到所述图像块上各处的深度数据;
9.第二处理单元,连接所述第一计算单元,用于根据各所述距离阈值求得到距离标准差值,并根据所述距离标准差值和所述综合坡度处理得到坡面斜度校准值;
10.指令生成单元,连接所述第一处理单元,用于根据所述坡面斜度校准值和各所述深度数据处理得到夹持角度调整指令,以及根据所述反馈力生成按压指令;
11.所述运动部件根据所述夹持角度调整指令调整各所述机械爪对所述生态护砌的夹持角度,以及根据所述按压指令调整各所述机械爪对所述生态护砌的按压力度。
12.进一步地,所述第二处理单元包括:
13.第一计算子单元,用于将各所述距离阈值代入标准差计算公式中,计算得到所述距离标准差值;
14.校准子单元,连接所述第一计算子单元,用于在所述距离标准差值大于预设的距离阈值时,用于将所述综合坡度与所述距离标准差值相加得到所述坡面斜度校准值,以及在所述距离标准差值不大于所述距离阈值时,将所述综合坡度作为所述坡面斜度校准值。
15.进一步地,所述指令生成单元包括:
16.第一处理子单元,用于根据所述深度数据处理得到所述图像块相对应的所述河道坡面的各处实际深度,进而将各所述实际深度和所述坡面斜度校准值输入预先训练完成的一斜度调整模型中,得到单位坡优化斜度,并根据所述单位坡优化斜度处理得到所述夹持角度调整指令;
17.第二处理子单元,用于在所述反馈力大于预设的第一阈值时生成第一按压指令,以及在所述反馈力不大于预设的第二阈值时生成第二按压指令;
18.所述运动部件根据所述第一按压指令减小各所述机械爪对所述生态护砌的按压力度,以及根据所述第二按压指令增大各所述机械爪对所述生态护砌的按压力度。
19.进一步地,所述运动部件包括旋转台、抬升组件和摆动组件;
20.所述旋转台固定在所述运输装置的上端,并用于带动所述抬升组件水平旋转;所述抬升组件固定在所述旋转台上端,并用于带动所述摆动组件纵向升降;所述摆动组件固定在所述抬升组件上端,用于带动所述夹持组件纵向摆动,所述夹持组件设置在所述摆动组件远离所述抬升组件的一端。
21.进一步地,所述夹持组件包括支撑柱和各所述机械爪,所述支撑柱固定连接所述摆动组件远离所述抬升组件的一端,所述机械爪包括摆动杆部和夹持部,各所述摆动杆部一端可转动地连接所述支撑柱的四周,另一端可转动地连接所述夹持部,所述喷浆枪头贯穿所述支撑柱并处于各所述机械爪之间,所述喷浆枪头上固定套接有固定座,所述固定座与各所述摆动杆部之间均设有气缸,所述气缸的活塞杆可转动地连接所述摆动杆部的中部,所述气缸远离活塞杆的一端可转动地连接所述固定座。
22.进一步地,所述夹持部内嵌设有夹缝喷头,所述夹缝喷头的喷射口位于所述夹持部朝向所述生态护砌的外表面,所述抽浆泵的输出端还连接有若干分导管,所述分导管连通所述夹缝喷头。
指的是附图中的方向,词语“底面”和“顶面”、“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
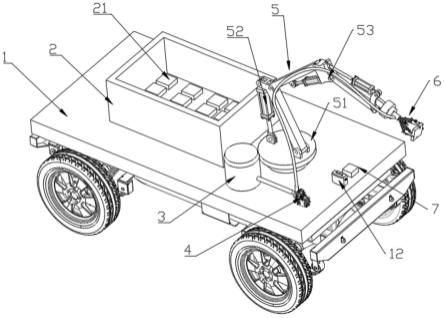
38.如图1和图2所示,本实施例的一种适用于城市水网生态护砌的铺砖设备,包括运输装置1、装料斗2、泥浆桶3、护砌装夹机构和用于检测河道坡面综合坡度的坡度检测装置12,装料斗2、泥浆桶3、护砌装夹机构和坡度检测装置12均固定设置在运输装置1上端;装料斗2内设有若干生态护砌21,生态护砌21中部开设有孔洞;泥浆桶3通过导管连接一抽浆泵4的输入端,抽浆泵4的输出端连接一主导管;护砌装夹机构包括运动部件5、夹持组件6和控制器7,运动部件5固定在运输装置1上端,夹持组件6固定在运动部件5远离运输装置1一端,控制器7电连接抽浆泵4、运动部件5、夹持组件6和坡度检测装置12;
39.夹持组件6包括若干机械爪61,各机械爪61之间设有连通主导管的喷浆枪头62,夹持组件6与摆动组件53之间设有用于检测河道坡面对各机械爪61反馈力的压力传感器8,机械爪61的外壁上安装有用于拍摄河道坡面实时图像的图像采集装置9,图像采集装置9电连接控制器7,控制器7控制运动部件5带动夹持组件6移动以夹持生态护砌21至河道坡面,控制抽浆泵4将泥浆泵入喷浆枪头62以贯穿孔洞对河道坡面喷浆,以及根据实时图像、综合坡度和反馈力调整各机械爪61对生态护砌21的夹持角度和按压力度。
40.具体地,本实施例中,在进行生态护砌21铺设作业之前,首先需要控制运输装置1在需要铺设的河道坡面上完整走一圈,此时图像采集装置9实时采集得到完整的河道坡面的实时图像,坡度检测装置12检测得到综合坡度并发送给控制器7,控制器7根据生态护砌21的尺寸对将实时图像划分为若干图像块,进而控制运动部件5在装料斗2里面夹持生态护砌21,控制运输装置1移动到要河道坡面要铺设的位置处,以及控制运动部件5将生态护砌21按压在图像块对应的河道坡面位置处。进而控制抽浆泵4将泥浆泵入喷浆枪头62以贯穿孔洞对河道坡面喷浆,实现了喷浆和按压生态护砌21一体化,提升了生态护砌21铺设效率。在各机械爪61夹持生态护砌21按压在喷完浆的河道坡面上时,控制器7根据实时图像、综合坡度和反馈力调整各机械爪61对生态护砌21的夹持角度和按压力度,使得生态护砌21按压安装时能更加契合河道坡面的上各处的实际坑洼和倾角,同时保证了按压安装时的力道,实现了全自动铺设生态护砌21,提升了生态护砌21铺设作业的质量和安全性。
41.优选的,同一竖直平面上的机械爪61的外壁上安装有用于检测机械爪61与河道坡面之间相对距离的距离传感器13,则控制器7包括:
42.第一计算单元71,用于计算每对相对距离之间的距离阈值;
43.第一处理单元72,用于根据生态护砌21的尺寸将实时图像预先划分为若干图像块,并根据预设图像识别算法识别得到图像块上各处的深度数据;
44.第二处理单元73,连接第一计算单元71,用于根据各距离阈值求得到距离标准差值,并根据距离标准差值和综合坡度处理得到坡面斜度校准值;
45.指令生成单元74,连接第一处理单元72,用于根据坡面斜度校准值和各深度数据处理得到夹持角度调整指令,以及根据反馈力生成按压指令;
46.运动部件5根据夹持角度调整指令调整各机械爪61对生态护砌21的夹持角度,以及根据按压指令调整各机械爪61对生态护砌21的按压力度。
47.具体地,本实施例中,通过在同一竖直平面上的机械爪61的外壁上安装距离传感器13,使得能够获取到相对距离,并对相对距离进行做差得到距离阈值。在理想状态下,同
一竖直平面上的机械爪61检测到的相对距离应该是一样的,因此理想状态下的距离阈值应该为0。在本实施例中,由于运动部件5的运动误差以及坡面各处的不平整,距离阈值一般不为0。第一计算单元71用于将同一竖直平面上的机械爪61与河道坡面之间的相对距离两两做差得到距离阈值。第一处理单元72根据深度优先搜索算法处理得到各图像块上各处的深度数据。第二处理单元73根据各距离阈值进行求标准差处理得到距离标准差值,进而根据距离标准差值和综合坡度值求得坡面斜度校准值,实现了利用距离阈值对综合坡度进行校准,使得最终得到的坡面斜度校准值更加接近河道坡面的真实坡度,提升了河道坡面坡度检测的精度。
48.优选的,第二处理单元73包括:
49.第一计算子单元731,用于将各距离阈值代入标准差计算公式中,计算得到距离标准差值;
50.校准子单元732,连接第一计算子单元731,用于在距离标准差值大于预设的距离阈值时,用于将综合坡度与距离标准差值相加得到坡面斜度校准值,以及在距离标准差值不大于距离阈值时,将综合坡度作为坡面斜度校准值。
51.具体地,本实施例中,第一计算子单元731通过将同一竖直平面上的机械爪61之间的距离阈值带入标准差计算公式中,最终计算得到距离标准差值。校准子单元732将距离标准差值与距离阈值进行比较,距离阈值可以为0.1cm。当距离标准差值大于0.1cm时表明此时的坡面各处坡度相差过大需要进行校准,通过综合坡度与距离标准差值相加的形式得到坡面斜度校准值,实现了对综合坡度的校准。当距离标准差值不大于0.1cm时表明此时的坡面各处坡度相差不大无需校准,可以直接将综合坡度作为坡面斜度校准值。
52.优选的,指令生成单元74包括:
53.第一处理子单元741,用于根据深度数据处理得到图像块相对应的河道坡面的各处实际深度,进而将各实际深度和坡面斜度校准值输入预先训练完成的一斜度调整模型中,得到单位坡优化斜度,并根据单位坡优化斜度处理得到夹持角度调整指令;
54.第二处理子单元742,用于在反馈力大于预设的第一阈值时生成第一按压指令,以及在反馈力不大于预设的第二阈值时生成第二按压指令;
55.运动部件5根据第一按压指令减小各机械爪61对生态护砌21的按压力度,以及根据第二按压指令增大各机械爪61对生态护砌21的按压力度。
56.具体地,本实施例中,第一处理子单元741首先将各处的深度数据转化为河道坡面各处的实际深度。进而利用斜度调整模型对各实际深度和坡面斜度校准值进行处理得到单位坡优化斜度,该斜度调整模型利用实际深度对坡面斜度校准值进行再度优化,使得单位坡优化斜度与图像块对应的河道坡面的真实坡度进一步接近,进一步提升了河道坡面坡度检测精度。第二处理子单元742根据不同的反馈力生成不同的按压指令,在反馈力大于第一阈值时生成第一按压指令,减小各机械爪61对对生态护砌21的按压力度,在反馈力不大于第二阈值时生成第二按压指令,增大各机械爪61对生态护砌21的按压力度,实现了将各机械爪61对生态护砌21的按压力限制在第一阈值和第二阈值之间,在确保按压紧实的同时避免按压深度过深影响河道坡面的土壤结块。
57.优选的,运动部件5包括旋转台51、抬升组件52和摆动组件53;
58.旋转台51固定在运输装置1的上端,并用于带动抬升组件52水平旋转;抬升组件52
固定在旋转台51上端,并用于带动摆动组件53纵向升降;摆动组件53固定在抬升组件52上端,用于带动夹持组件6纵向摆动,夹持组件6设置在摆动组件53远离抬升组件52的一端。
59.优选的,如图3所示,夹持组件6包括支撑柱63和各机械爪61,支撑柱63固定连接摆动组件53远离抬升组件52的一端,机械爪61包括摆动杆部611和夹持部612,各摆动杆部611一端可转动地连接支撑柱63的四周,另一端可转动地连接夹持部612,喷浆枪头62贯穿支撑柱63并处于各机械爪61之间,喷浆枪头62上固定套接有固定座64,固定座64与各摆动杆部611之间均设有气缸,气缸的活塞杆可转动地连接摆动杆部611的中部,气缸远离活塞杆的一端可转动地连接固定座64。
60.具体地,本实施例中,气缸驱动各摆动杆部611摆动,带动各夹持部612开合以实现对生态护砌21的夹持和分离。
61.优选的,夹持部612内嵌设有夹缝喷头613,夹缝喷头613的喷射口位于夹持部612朝向生态护砌21的外表面,抽浆泵4的输出端还连接有若干分导管,分导管连通夹缝喷头613。
62.具体地,本实施例中,通过在夹持部612内嵌设有夹缝喷头613,使得各机械爪61将各生态护砌21按压在喷过泥浆的河道坡面上时,还能通过夹缝喷头613对各生态护砌21之间的夹缝喷射泥浆,使得各生态护砌21之间能够贴合更加紧密。在本实施例中夹缝喷头613和喷浆枪头62内均设有不同的电磁阀,由控制器7进行控制,以控制主导管和分导管的通断。
63.优选的,运输装置1上还安装有无线通讯模块10,电连接压力传感器8、图像采集装置9、坡度检测装置12和一云端数据平台11,用于实时将实时图像、综合坡度和反馈力上传至云端数据平台11,云端数据平台11根据上传时间将实时图像、综合坡度和反馈力进行保存。
64.具体地,本实施例中,通过设置无线通讯模块10和云端数据平台11,实现了将实时采集到的实时图像、综合坡度和反馈力进行无线传输和云端存储,可以在云端数据平台11进行数据调用读取以及历史数据保存,避免数据丢失。
65.优选的,无线通讯模块10包括蓝牙模块、wifi模块、zigbee模块或dtu模块。
66.一种适用于城市水网生态护砌的铺设方法,应用于上述的适用于城市水网生态护砌的铺砖设备,如图4所示,包括:
67.步骤s1,坡度检测装置12检测河道坡面的综合坡度,图像采集装置9拍摄河道坡面实时图像,控制器7根据生态护砌21的尺寸将实时图像预先划分为若干图像块;
68.步骤s2,控制器7控制运动部件5带动夹持组件6移动以夹持生态护砌21至各图像块所对应的河道坡面上,同时控制器7控制抽浆泵4将泥浆泵入喷浆枪头62以贯穿孔洞对各图像块所对应的河道坡面进行喷浆;
69.步骤s3,压力传感器8检测河道坡面对各机械爪61的反馈力;
70.步骤s4,控制器7根据实时图像、综合坡度和反馈力调整各机械爪61对生态护砌21的夹持角度和按压力度。
71.以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应
视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。