技术特征:
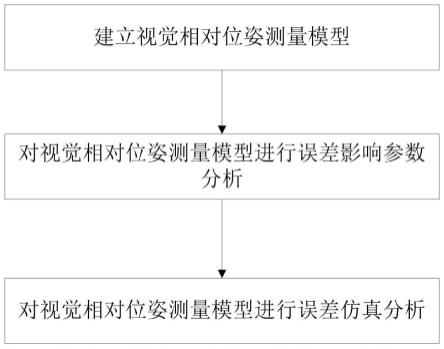
1.一种基于点线综合特征的视觉相对位姿测量误差估计方法,其特征在于,所述基于点线综合特征的视觉相对位姿测量误差估计方法包括:s1、建立视觉相对位姿测量模型,包括建立基于点特征的视觉相对位姿测量模型和基于线特征的视觉相对位姿测量模型;s2、对所述视觉相对位姿测量模型进行误差影响参数分析,包括相机内参数的影响分析和特征提取像素误差的影响分析;s3、对所述视觉相对位姿测量模型进行误差仿真分析以完成视觉相对位姿测量误差估计。2.根据权利要求1所述的基于点线综合特征的视觉相对位姿测量误差估计方法,其特征在于,所述基于点特征的视觉相对位姿测量模型为其中,是表示从世界坐标系到相机坐标系的旋转矩阵,是相机坐标系原点在世界坐标系下的坐标,为空间点p
i
对应的世界坐标系中的齐次坐标,为空间点p
i
从世界坐标系中的齐次坐标投影到图像坐标系中的齐次坐标,k为相机内参数矩阵,f为相机镜头焦距,s
x
和s
y
是图像水平和垂直方向的像元尺寸,[c
x
,c
y
]
t
是图像的主点坐标;函数f1和f2的具体表达形式根据实际应用场景中的点特征对应的相机内参数、世界坐标系中的齐次坐标和图像坐标系中的齐次坐标确定。3.根据权利要求1所述的基于点线综合特征的视觉相对位姿测量误差估计方法,其特征在于,所述基于线特征的视觉相对位姿测量模型为其中,和分别表示基于线特征求解的旋转矩阵和平移向量;l为跑道特征线在世界坐标系中的三维坐标,m为直线的矩,为直线的方向向量;l为l对应图像坐标系中的像素坐标;函数f3和f4的具体表达形式根据实际应用场景中的线特征对应的相机内参数、世界坐标系中的三维坐标和图像坐标系中的像素坐标获取。4.根据权利要求1所述的基于点线综合特征的视觉相对位姿测量误差估计方法,其特征在于,所述基于线特征求解的旋转矩阵征在于,所述基于线特征求解的旋转矩阵c
θ
、c
γ
、分别表
示对应俯仰角、横滚角和偏航角的旋转矩阵,θ、γ、分别表示俯仰角、横滚角、偏航角。5.根据权利要求3所述的基于点线综合特征的视觉相对位姿测量误差估计方法,其特征在于,根据分析相机内参数的影响,其中,j=1,2,3,k1表示镜头焦距与像元尺寸之间的比值f/s
x
,k2表示镜头焦距与像元尺寸之间的比值f/s
y
,k3表示图像的主点坐标[c
x
,c
y
]
t
。6.根据权利要求3所述的基于点线综合特征的视觉相对位姿测量误差估计方法,其特征在于,根据征在于,根据分析特征提取像素误差的影响,其中,和分别表示由第i个特征点行坐标像素提取误差δx
i
引起的姿态误差和位置误差,和分别表示由第i个特征点列坐标像素提取误差δy
i
引起的姿态误差和位置误差,和分别表示由图像坐标系内第i条直线斜率变化δk
i
所引起的姿态误差和位置误差,和分别表示由图像坐标系内第i条直线截距δb
i
所引起的姿态误差和位置误差。7.根据权利要求1所述的基于点线综合特征的视觉相对位姿测量误差估计方法,其特征在于,利用halcon软件对所述视觉相对位姿测量模型进行误差仿真分析。8.根据权利要求7所述的基于点线综合特征的视觉相对位姿测量误差估计方法,其特征在于,利用halcon软件对所述视觉相对位姿测量模型进行误差仿真分析具体包括:s31、根据测量场景中的点特征和线特征分布,利用halcon软件模拟应用场景,通过设定相机内外参数,生成场景成像真值模板;s32、通过halcon软件编程,实现基于点线特征的视觉相对位姿测量;s33、通过halcon代码分别给相机内参数、真值模板的特征点和特征线添加误差扰动,以此分析相机内参数标定误差和特征提取误差对视觉相对位姿测量误差的影响。9.根据权利要求8所述的基于点线综合特征的视觉相对位姿测量误差估计方法,其特征在于,相机外参数包括相机位置。
技术总结
本发明提供了一种基于点线综合特征的视觉相对位姿测量误差估计方法,该基于点线综合特征的视觉相对位姿测量误差估计方法包括:S1、建立视觉相对位姿测量模型,包括建立基于点特征的视觉相对位姿测量模型和基于线特征的视觉相对位姿测量模型;S2、对视觉相对位姿测量模型进行误差影响参数分析,包括相机内参数的影响分析和特征提取像素误差的影响分析;S3、对视觉相对位姿测量模型进行误差仿真分析以完成视觉相对位姿测量误差估计。应用本发明的技术方案,能够解决无人机自主起降过程中视觉相对位姿测量精度易受目标特征提取精度和相机内参数标定误差影响的技术问题。相机内参数标定误差影响的技术问题。相机内参数标定误差影响的技术问题。
技术研发人员:尚克军 明丽 扈光峰 徐策 刘崇亮 李茜茜 王大元 焦浩 李至 赵亮
受保护的技术使用者:北京自动化控制设备研究所
技术研发日:2022.10.09
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。