技术特征:
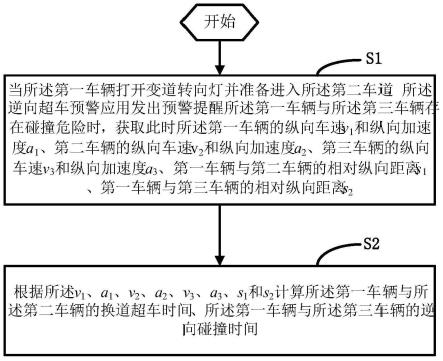
1.一种v2x逆向超车实车场景的测试方法,其特征在于,所述方法基于第一车辆、第二车辆和第三车辆实现,所述第一车辆上安装有基于v2x通信技术实现的逆向超车预警应用;所述第一车辆和所述第二车辆行驶于测试路段的第一车道,且所述第二车辆位于所述第一车辆前方;所述第三车辆行驶于测试路段的第二车道;其中,所述第一车道和所述第二车道为相邻车道,且行驶方向相反;所述方法包括:当所述第一车辆打开变道转向灯并准备进入所述第二车道,所述逆向超车预警应用发出预警提醒所述第一车辆与所述第三车辆存在碰撞危险时,获取此时所述第一车辆的纵向车速v1和纵向加速度a1、第二车辆的纵向车速v2和纵向加速度a2、第三车辆的纵向车速v3和纵向加速度a3、第一车辆与第二车辆的相对纵向距离s1、第一车辆与第三车辆的相对纵向距离s2;根据所述v1、a1、v2、a2、v3、a3、s1和s2计算所述第一车辆与所述第二车辆的换道超车时间、所述第一车辆与所述第三车辆的逆向碰撞时间。2.如权利要求1所述的v2x逆向超车实车场景的测试方法,其特征在于,所述根据所述v1、a1、v2、a2、v3、a3、s1和s2计算所述第一车辆与所述第二车辆的换道超车时间、所述第一车辆与所述第三车辆的逆向碰撞时间,包括:当a1=0时,根据所述v1、v2、s1计算所述第一车辆与所述第二车辆的换道超车时间;并根据所述v1、v3、s2计算所述第一车辆与所述第三车辆的逆向碰撞时间。3.如权利要求2所述的v2x逆向超车实车场景的测试方法,其特征在于,所述根据所述v1、v2、s1计算所述第一车辆与所述第二车辆的换道超车时间,如下所示:其中,ttc1为所述第一车辆与所述第二车辆的换道超车时间,k1和k2为预设的常数;所述根据所述v1、v3、s2计算所述第一车辆与所述第三车辆的逆向碰撞时间,如下所示:其中,ttc2为所述第一车辆与所述第三车辆的逆向碰撞时间。4.如权利要求1所述的v2x逆向超车实车场景的测试方法,其特征在于,所述根据所述v1、a1、v2、a2、v3、a3、s1和s2计算所述第一车辆与所述第二车辆的换道超车时间、所述第一车辆与所述第三车辆的逆向碰撞时间,包括:当a1≠0时,根据v1和v3之差、a1和a3之差a5、s2计算t1和t2;根据所述t1和t2的比较结果确定所述第一车辆与所述第三车辆的逆向碰撞时间为t1或为t2;其中,ttc2为所述第一车辆与所述第三车辆的逆向碰撞时间。5.如权利要求4所述的v2x逆向超车实车场景的测试方法,其特征在于,所述根据v1和v3之差、a1和a3之差、s2计算t1和t2,如下所示:
其中,v5为v1和v3之差,a5为a1和a3之差。6.如权利要求1所述的v2x逆向超车实车场景的测试方法,其特征在于,所述根据所述v1、a1、v2、a2、v3、a3、s1和s2计算所述第一车辆与所述第二车辆的换道超车时间、所述第一车辆与所述第三车辆的逆向碰撞时间,包括:当a4≠0时,根据v1和v2之差、a1和a2之差、s2计算t3和t4;根据所述t3和t4的比较结果确定所述第一车辆与所述第二车辆的换道超车时间为t3或为t4;其中,ttc1为所述第一车辆与所述第二车辆的换道超车时间,k2为预设的常数。7.如权利要求6所述的v2x逆向超车实车场景的测试方法,其特征在于,所述根据v1和v2之差、a1和a2之差、s2计算t3和t4,如下所示:,如下所示:其中,v4为v1和v2之差,a4为a1和a2之差,k1和k2为预设的常数。8.如权利要求1所述的v2x逆向超车实车场景的测试方法,其特征在于,所述根据所述v1、a1、v2、a2、v3、a3、s1和s2计算所述第一车辆与所述第二车辆的换道超车时间、所述第一车辆与所述第三车辆的逆向碰撞时间,包括:当a4=0时,根据所述v1、v2、s2计算所述第一车辆与所述第二车辆的换道超车时间。9.如权利要求8所述的v2x逆向超车实车场景的测试方法,其特征在于,所述根据所述v1、v2、s2计算所述第一车辆与所述第二车辆的换道超车时间,如下所示:其中,ttc1为所述第一车辆与所述第二车辆的换道超车时间,k1和k2为预设的常数。10.一种v2x逆向超车实车场景的测试装置,其特征在于,用于实现上述权利要求1~9中任一项所述的v2x逆向超车实车场景的测试方法,所述装置包括:实车数据获取模块,用于当所述第一车辆打开变道转向灯并准备进入所述第二车道,所述逆向超车预警应用发出预警提醒所述第一车辆与所述第三车辆存在碰撞危险时,获取此时所述第一车辆的纵向车速v1和纵向加速度a1、第二车辆的纵向车速v2和纵向加速度a2、
第三车辆的纵向车速v3和纵向加速度a3、第一车辆与第二车辆的相对纵向距离s1、第一车辆与第三车辆的相对纵向距离s2;实车数据计算模块,用于根据所述v1、a1、v2、a2、v3、a3、s1和s2计算所述第一车辆与所述第二车辆的换道超车时间、所述第一车辆与所述第三车辆的逆向碰撞时间。
技术总结
本发明公开了一种V2X逆向超车实车场景的测试方法与装置,包括:当第一车辆打开变道转向灯并准备进入第二车道,逆向超车预警应用发出预警提醒第一车辆与第三车辆存在碰撞危险时,获取此时第一车辆的纵向车速v1和纵向加速度a1、第二车辆的纵向车速v2和纵向加速度a2、第三车辆的纵向车速v3和纵向加速度a3、第一车辆与第二车辆的相对纵向距离s1、第一车辆与第三车辆的相对纵向距离s2;根据v1、a1、v2、a2、v3、a3、s1和s2计算第一车辆与第二车辆的换道超车时间、第一车辆与第三车辆的逆向碰撞时间。通过本发明,能够解决目前Prescan软件仿真测试无法满足换道超车时间和逆向碰撞时间的可靠性要求的技术问题。要求的技术问题。要求的技术问题。
技术研发人员:蔡文活 李彤 方宏伟 孟浩磊 刘永浩 秦雨云
受保护的技术使用者:广州汽车集团股份有限公司
技术研发日:2022.10.28
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。