技术特征:
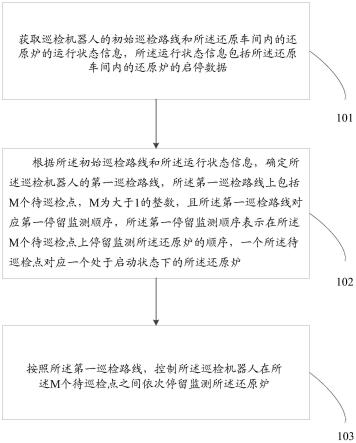
1.一种还原车间的巡检方法,其特征在于,所述方法包括:获取巡检机器人的初始巡检路线和所述还原车间内的还原炉的运行状态信息,所述运行状态信息包括所述还原车间内的还原炉的启停数据;根据所述初始巡检路线和所述运行状态信息,确定所述巡检机器人的第一巡检路线,所述第一巡检路线上包括m个待巡检点,m为大于1的整数,且所述第一巡检路线对应第一停留监测顺序,所述第一停留监测顺序表示在所述m个待巡检点上停留监测所述还原炉的顺序,一个所述待巡检点对应一个处于启动状态下的所述还原炉;按照所述第一巡检路线,控制所述巡检机器人在所述m个待巡检点之间依次停留监测所述还原炉。2.根据权利要求1所述的还原车间的巡检方法,其特征在于,所述运行状态信息还包括n条目标异常信息,n为小于或等于m的正整数,所述目标异常信息用于表示还原车间内处于启动状态的还原炉存在异常,所述m个待巡检点按照所述第一停留监测顺序排列的前n个待巡检点基于所述n条目标异常信息确定。3.根据权利要求1所述的还原车间的巡检方法,其特征在于,所述获取巡检机器人的初始巡检路线之前,还包括:获取所述还原车间的还原炉分布情况和自动驾驶车辆的规划路线;根据所述还原车间的还原炉分布情况和自动驾驶车辆的规划路线,确定所述巡检机器人的初始巡检路线。4.根据权利要求1所述的还原车间的巡检方法,其特征在于,所述按照所述第一巡检路线,控制所述巡检机器人在所述m个待巡检点之间依次停留监测所述还原炉之后,所述方法还包括:检测所述第一巡检路线是否存在阻碍所述巡检机器人移动的目标障碍物;在检测到所述目标障碍物的情况下,确定所述目标障碍物对应的阻碍区域,所述阻碍区域用于表示阻碍所述巡检机器人移动的区域;根据所述阻碍区域、所述初始巡检路线和所述运行状态信息确定第二巡检路线,所述第二巡检路线上包括所述m个待巡检点中的至少部分待巡检点,且所述第二巡检路线不包括所述阻碍区域;按照所述第二巡检路线,控制所述巡检机器人继续巡检。5.根据权利要求4所述的还原车间的巡检方法,其特征在于,在检测到所述目标障碍物的情况下,确定所述目标障碍物对应的阻碍区域包括:在检测到所述目标障碍物的情况下,获取所述目标障碍物的移动速度;在所述目标障碍物的移动速度小于或等于预设速度时,确定所述目标障碍物对应的阻碍区域,所述阻碍区域用于表示阻碍所述巡检机器人移动的区域。6.根据权利要求1所述的还原车间的巡检方法,其特征在于,所述按照所述第一巡检路线,控制所述巡检机器人在所述m个待巡检点之间依次停留监测所述还原炉之后,所述方法包括:获取所述巡检机器人的剩余电量值;根据所述剩余电量值,确定所述巡检机器人是否需要停止巡检;在所述巡检机器人需要停止巡检的情况下,获取所述初始巡检路线上的充电点的位置
信息;根据所述初始巡检路线和所述充电点的位置信息,确定充电路线;按照所述充电路线,控制所述巡检机器人到达所述充电点。7.一种还原车间的巡检装置,包括:获取模块,用于获取巡检机器人的初始巡检路线和所述还原车间内的还原炉运行状态信息,所述运行状态信息包括还原车间内还原炉的启停数据;确定模块,用于根据所述初始巡检路线和所述运行状态信息,确定所述巡检机器人的第一巡检路线,所述第一巡检路线上包括m个待巡检点,且所述第一巡检路线对应第一停留监测顺序,所述第一停留监测顺序表示在所述m个待巡检点上停留监测所述还原炉的顺序,一个所述待巡检点对应一个处于启动状态下的所述还原炉,其中m为大于1的整数;控制模块,用于按照所述第一巡检路线,控制所述巡检机器人在所述m个待巡检点之间依次停留监测所述还原炉。8.根据权利要求7所述的还原车间的巡检装置,其特征在于,所述运行状态信息还包括n条目标异常信息,n为小于或等于m的正整数,所述目标异常信息用于表示还原车间内处于启动状态的还原炉存在异常,所述m个待巡检点按照所述第一停留监测顺序排列的前n个待巡检点基于所述n条目标异常信息确定。9.一种通信设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的程序;其特征在于,所述处理器用于执行存储器中的程序实现如权利要求1至6中任一项所述的还原车间的巡检方法的步骤。10.一种可读存储介质,用于存储程序,其特征在于,所述程序被处理器执行时实现如权利要求1至6中任一项所述的还原车间的巡检方法的步骤。
技术总结
本申请提供一种还原车间的巡检方法及相关设备,通过获取巡检机器人的初始巡检路线和还原车间内的还原炉的运行状态信息,根据初始巡检路线和运行状态信息,确定巡检机器人的第一巡检路线,第一巡检路线上包括M个待巡检点,M为大于1的整数,且第一巡检路线对应第一停留监测顺序,第一停留监测顺序表示在M个待巡检点上停留监测还原炉的顺序,一个待巡检点对应一个处于启动状态下的还原炉;按照第一巡检路线,控制巡检机器人在M个待巡检点之间依次停留监测还原炉。这样利用规划的具有先后监测顺序的路线进行监测,对需要监测的还原炉进行监测,对需要优先监测的还原炉优先监测,从而实现及时监测还原车间内多个还原炉内产品的运行状态。行状态。行状态。
技术研发人员:狐政恺 陈琰琳 银波 王永富 刘丹丹 刘兴平 王倩
受保护的技术使用者:内蒙古新特硅材料有限公司
技术研发日:2022.10.25
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。