技术特征:
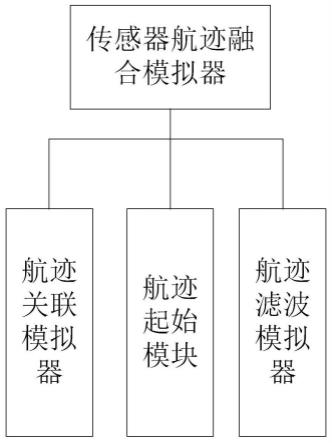
1.一种序贯式多传感器航迹融合效果仿真模拟器的设计方法,其特征在于,该仿真模拟器包括航迹关联模拟器、航迹起始模块和航迹滤波模拟器;航迹模拟器的启动由传感器输入航迹点启动,首先运行航迹关联模拟器,如果输入的传感器航迹点与已有航迹关联上,则将航迹点与关联航迹输入航迹滤波模拟器,否则输入航迹起始模块,产生新融合航迹;航迹滤波模拟器对当前目标运动状态进行更新,并将更新结果保存到融合航迹数据列表;航迹关联模拟器执行如下步骤:第s100步:输入传感器j在t
k
时刻的原始航迹点为r
j
_track(t
k
),z为原始航迹点r
j
_track(t
k
)的运动状态向量;第s101步:判断融合航迹列表是否为空,如果空转航迹起始模块,否则转入第s102步;第s102步:选择航迹列表中的一条航迹i,根据航迹i上一时刻的航迹点位置估计值预报t
k
时刻的航迹点位置预报值其中其中,f是运动状态转移矩阵,预报t
k
时刻的状态协方差矩阵为其中p是状态协方差矩阵,q是过程噪声协方差矩阵,是状态协方差矩阵估计值,是状态协方差矩阵预报值;其中,融合航迹列表为f_track
i
(k);i=1,...,n;k=1,...,k
i
,n为航迹列表中的航迹数量,k
i
为编号为i的航迹中的点数;x为融合航迹列表f_track
i
(k)的运动状态向量;第s103步:计算目标关联分离度sdoa为目标关联分离度,用于定义两个目标之间关联计算面临的难度;s104步:设置两个错误关联概率表,分为两类错误,第一类为应该关联的点未关联的概率表,记未tab1,第二类为不应该关联的点进行了错误关联的概率表,记未tab2,表中列出不同sdoa数值下进行两种错误关联的概率;在仿真中,待关联的原始航轨点对应目标的id为z|
target_id
,融合航迹最后点对应的目标id为f_track
i
(k
i
)|
target_id
第s105步:如果f_track
i
(k
i
)|
target_id
=z|
target_id
,则查询tab1表,关联概率为1-p
tab1
(sdoa),否则查tab2表,关联概率为p
tab2
(sdoa)第s106步:依据s105的关联概率,按照伯努利分布生成随机数,如果为1,将z与f_track
i
(k
i
)关联,转入航迹滤波模拟器,否则转入航迹起始模块;航迹滤波模拟器执行如下步骤:第s200步:输入融合航迹i上个时刻融合航迹点估计值关联的当前时刻传感器原始航迹点z
k
=r
j
_track(t
k
),仿真目标t
k
时刻航迹真值x
k
;第s201步:计算航迹预测,其中,g(
·
)为当前状态真值与预报值的函数;第s202步:计算状态协方差预测,上个时刻滤波状态协方差矩阵估计值为过程噪声协方差矩阵为q
k-1
;
第s203步:计算增益矩阵h为观测矩阵;传感器原始航迹误差协方差为r
k
;第s204步:计算航迹点位置估计值更新值输出融合滤波航迹点,并存储到f_track
i
(k);第s205步:更新t
k
时刻状态协方差矩阵估计值为航迹起始模块执行如下步骤:第s300步:判断传感器航迹点是否与已有航迹关联,是进入步骤s301,否进入步骤s302;第s301步:无新航迹起始;第s302步:传感器新航迹点作为新航迹第一点,航迹号为历史航迹号加1。2.如权利要求1所述的序贯式多传感器航迹融合效果仿真模拟器的设计方法,其特征在于,错误关联概率表在模拟器执行前作为配置表提前配置。3.如权利要求1所述的序贯式多传感器航迹融合效果仿真模拟器的设计方法,其特征在于,所述步骤s103具体包括如下步骤:s103.1:输入传感器原始航迹误差协方差σ
lat
为原始航迹的纬度标准差,σ
long
为原始航迹的经度标准差,根据原始航迹精度先验信息进行设置;s103.2:待关联的原始航迹点位置的概率密度函数为其中,z表示待关联的原始航迹点的观测值;航迹中最后一个估计点外推预报位置的概率密度函数为s103.3:令m=(n1 n2)/2为概率密度函数的平均,n1、n2、m分别用n1(x)、n2(x)、m(x)表示;分别计算n1和m、n2和m之间的kl散,即其中,i=1,2;s103.4:计算n1和n2的js散度,即4.如权利要求1所述的序贯式多传感器航迹融合效果仿真模拟器的设计方法,其特征在于,所述航迹滤波模拟器中,对于六维滤波器,即经纬高加各自的速度,则
δt为时间间隔。5.如权利要求1所述的序贯式多传感器航迹融合效果仿真模拟器的设计方法,其特征在于,所述航迹滤波模拟器中,对于四维滤波器,即经纬加各自速度,则δt为时间间隔。6.如权利要求1-5任一项所述的序贯式多传感器航迹融合效果仿真模拟器的设计方法,其特征在于,函数g(
·
)为g(x1,x2)=α(x
1-x2),其中0≤α≤1的设置参数。7.如权利要求6所述的序贯式多传感器航迹融合效果仿真模拟器的设计方法,其特征在于,α=0时,航迹滤波模拟器模拟kf滤波器效果。8.如权利要求6所述的序贯式多传感器航迹融合效果仿真模拟器的设计方法,其特征在于,α=1时,航迹滤波模拟器模拟完全没有截断误差,和真实运动完全一致的理想运动模型。9.如权利要求6所述的序贯式多传感器航迹融合效果仿真模拟器的设计方法,其特征在于,0<α<1时,航迹滤波模拟器模拟介于线性滤波器与理想滤波器之间,线性修正截断误差的滤波器。10.如权利要求1-5任一项所述的序贯式多传感器航迹融合效果仿真模拟器的设计方法,其特征在于,函数g(
·
)为其中表示用户自定义的某种滤波器中运动方程,此时航迹滤波即仿真用户自定义运动方程下的滤波效果。
技术总结
本发明涉及一种序贯式多传感器航迹融合效果仿真模拟器的设计方法,属于仿真建模与信息融合处理领域。本发明为了克服在体系仿真中,对传感器组网中心仿真缺乏可灵活仿真不同融合航迹质量的融合模拟器的问题,在遵循多传感器航迹融合算法基本框架的基础上进行改进,通过创新性地采用错误关联概率表和滤波模型修正函数作为外源参数的方法,为用户提供可自定义配置不同关联和滤波性能的估计过程,模拟出传感器组网系统输出的不同质量融合航迹,从而提高了融合航迹仿真的灵活性,为体系仿真提供了更高的自由度与真实性。供了更高的自由度与真实性。供了更高的自由度与真实性。
技术研发人员:刘冰 齐崇英 王艺 张新刚
受保护的技术使用者:中国人民解放军93209部队
技术研发日:2022.11.01
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。