1.本发明涉及水深反演的技术领域,尤其是涉及一种机器学习水深反演方法、装置、计算机设备以及存储介质。
背景技术:
2.目前,随着航运、岛礁开发、生态保护以及深海探测等多方位海洋开发探测的进行,通过水深反演的方式实现对海底数据的准确获取,对深海勘察具有重要意义。
3.现有的水深反演方式通常为通过卫星遥感技术结合声学仪器获取到的影像信息进行深海图像反演,从而根据反演图像数据获知检测海域的海底图像信息,但是,在作业过程中,反演图像数据的质量往往与拖鱼距海底的高度、拖鱼速度和海底本身特征相关,由于拖鱼在作业过程中高度呈动态变化,且声学仪器的自身成像的特点,容易导致海底反演图像出现几何畸变和辐射畸变,从而造成反演后的海底图像信息出现图像误差。
4.针对上述中的相关技术,发明人认为存在有作业过程中存在图像畸变,容易对繁衍后的海底图像数据造成误差影响的缺陷。
技术实现要素:
5.为了减少图像畸变对海底图像反演结果的误差影响,本技术提供一种机器学习水深反演方法、装置、计算机设备以及存储介质。
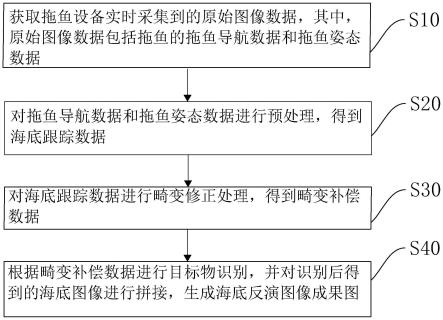
6.本技术的上述发明目的一是通过以下技术方案得以实现的:提供一种机器学习水深反演方法,所述机器学习水深反演方法包括:获取拖鱼设备实时采集到的原始图像数据,其中,所述原始图像数据包括拖鱼的拖鱼导航数据和拖鱼姿态数据;对所述拖鱼导航数据和拖鱼姿态数据进行预处理,得到海底跟踪数据;对所述海底跟踪数据进行畸变修正处理,得到畸变补偿数据;根据所述畸变补偿数据进行目标物识别,并对识别后得到的海底图像进行拼接,生成海底反演图像成果图。
7.通过采用上述技术方案,由于拖鱼在按照预设导航路径进行数据采集的过程中,海底水流的阻力以及海底复杂多变的环境都会影响海底反演图像成果图实际呈现效果,拖鱼在导航路线上的高度变化和侧扫声呐设备的自身成像都会导致最终的海底反演图像存在畸变,因此,通过拖鱼在按照导航路线进行海底图像采集的过程中,实时获取拖鱼设备采集到的原始图像数据,包括拖鱼导航数据和拖鱼姿态数据,便于根据拖鱼导航数据和拖鱼姿态数据对海底实际图像数据进行采集,通过对拖鱼导航数据和拖鱼姿态数据的预处理,来获取拖鱼的海底跟踪数据,便于根据海底跟踪数据判断海底的亮度均衡情况的起始位置和数据校正的起始位置,通过人工时变增益、波束角度改正的方式对海底跟踪数据进行畸变修正处理,有助于通过畸变补偿数据对海底的目标物进行准确识别,并根据地理位置和拖鱼的采集时间,对识别后的海底图像数据进行拼接,从而得到海底反演图像成果图,有助
于根据海底反演图像成果图准确地获知海底的实际图像。本技术通过对拖鱼采集的原始图像数据进行预处理和畸变补偿处理,来提高海底反演图像成果图与海底实际情况的拟合程度,减少图像畸变对海底图像反演结果的误差影响。
8.本技术在一较佳示例中可以进一步配置为:所述对所述拖鱼导航数据和拖鱼姿态数据进行预处理,得到海底跟踪数据,具体包括:将所述拖鱼导航数据和拖鱼姿态数据分别进行转码处理,得到可被计算机识别的拖鱼转码数据;对拖鱼转码数据进行数据平滑处理,得到剔除异常数据后的回波强度数据;对所述回波强度数据进行量化处理,得到回波强度量化数据;根据所述回波强度量化数据,对水体区和海底回波区之间的分界区域进行海底跟踪,得到海底跟踪数据。
9.通过采用上述技术方案,由于海底真实地形存在凹凸不平的情况,且海水的冲击容易使拖鱼产生摇摆,从而在拖鱼导航数据和拖鱼姿态数据中产生跳点或噪点等异常数据,影响对海底目标物的定位精度,因此,通过将拖鱼导航数据、拖鱼姿态数据进行数据转码处理,得到可被计算机识别的拖鱼转码数据,便于将拖鱼导航数据和拖鱼姿态数据导入计算机中进行数据处理,通过剔除拖鱼转码数据中的跳点或噪点来实现拖鱼转码数据的平滑处理,便于通过回波强度数据来提高对海底目标物的定位精度,在拖鱼设备将数据导入计算机的过程中,为了减少后续计算机处理和存储的运行压力,通过对回波强度数据进行量化处理,从而使回波强度量化数据满足计算机的运行需求,进而改善海底反演图像的成图对比度,且拖鱼设备进行数据采集的近端通常会形成一个低强度的水体区,水体区与海底回波区之间存在分界区域,该分界区域通常为图像亮度均衡调节的起始线,也是图像斜距地距校正的起始线,通过对该分界区域进行海底跟踪得到海底跟踪数据,便于通过海底跟踪数据对目标物的尺寸测量、图像斜距地距校正以及亮度均衡调节等提供图像校对标准,从而提高海底图像数据校对的准确性。
10.本技术在一较佳示例中可以进一步配置为:所述对所述海底跟踪数据进行畸变修正处理,得到畸变补偿数据,具体包括:计算待探测目标物与探测拖鱼设备之间的横向距离,得到拖鱼当前位置和待探测目标物之间的横向距离数据;根据所述横向距离数据在所述原始图像数据进行像素点标记, 得到像素点标记后的校正图像数据;对所述校正图像数据中的每个待探测目标物的像素点进行计算,得到所述校正图像数据中的每个待探测目标物的像素值;根据所述像素值对所述海底跟踪数据进行误差补偿,得到每个待探测目标物的畸变补偿数据。
11.通过采用上述技术方案,通过拖鱼设备的当前位置与待探测目标物的地理位置差,得到横向距离数据,便于根据横向距离数据对目标物图像的斜距地距进行校正,并根据横向距离数据在原始图像数据上进行待探测目标物的像素点标记,从而得到待探测目标物的校正图像数据,从而便于对待探测目标物的尺寸数据进行重新采样,通过对标记后的每个待探测目标物的像素点进行计算,得到校正图像上的每个待探测目标物的像素值,有助
于对每个待探测目标物的像素值进行独立计算,提高待探测目标物的测探精度,根据每个待探测目标物的像素值对海底跟踪数据进行误差补偿,得到每个待探测目标物的畸变补偿数据,提高每个待探测目标物与海底地形图像的融合精确度本技术在一较佳示例中可以进一步配置为:所述根据对所述畸变补偿数据进行目标物识别,并对识别后得到的海底图据进行拼接,生成海底反演图像成果图,具体包括:根据所述畸变补偿数据对探测目标物进行特征归类,得到符合海底目标物特征的目标物特征数据集;将所述目标特征数据集中对应的探测目标物位置在所述原始图像数据上进行标记,得到海底物质分布图集;按照所述横向距离数据对识别后的所述海底物质分布图集进行图像拼接处理,得到海底反演图像成果图。
12.通过采用上述技术方案,通过对待探测目标物在原始图像中的灰度、形状和形态等特征进行归类解释,便于根据目标物特征数据集结合待探测目标物所在区域的地质资料,对探测海底区域进行地质分类,并按照地理位置关联性和采集时间顺序对探测需求对探测海底区域的图像进行拼接,从而得到海底反演图像成果图,通过对多个高质量单条带的探测目标物的独立声呐图像进行拼接,来提高海底反演图像成果图的整体图像质量,从而减少图像灰度不均衡、拖鱼移动的定位不精准等情况带来的误差影响。
13.本技术在一较佳示例中可以进一步配置为:在所述根据对所述畸变补偿数据进行目标物识别,并对识别后得到的海底图据进行拼接,生成海底反演图像成果图之后,还包括:获取待测水域的侧视声呐图像数据和多波束测探数据;根据所述侧视声呐图像数据和多波束测探数据,对所述海底反演图像成果图进行数据修正处理,得到修正后的海底地形数据;根据所述海底地形数据对海底管线的位置进行标记,并根据标记结果计算与海底管线对应的管线埋深数据。
14.通过采用上述技术方案,通过拖鱼在待测水域下采集到的侧视声呐图像数据和多波束测深数据,便于为海底反演图像成果图的数据修正提供一个参考依据,并通过对海底反演图像成果图的数据修正,来得到符合海底地形实际分布情况的海底地形数据,减少对复杂曲折的海底环境的反演图像误差,根据海底地形数据来对海底铺设管线的地理位置进行标记,根据标记结果来计算海底管线的路由、具体铺设位置,并结合探测时间信息来对海底管线的管线埋深进行计算,得到管线埋深数据,通过管线埋深数据便于绘制出海底管线在海底地形数据真实铺设位置,从而提高海底管线铺设图像的反演准确度。
15.本技术在一较佳示例中可以进一步配置为:所述根据所述海底地形数据对海底管线的位置进行标记,并根据标记结果计算与海底管线对应的管线埋深数据,具体包括:根据所述拖鱼导航数据,实时采集拖鱼设备所接收到的磁信号变化数据;根据所述磁信号变化数据获取海底管线的海底的铺设位置数据,并在所述海底地形数据中进行标记,得到管线铺设位置图像数据;获取管线铺设位置区域的沿线泥层数据,其中,所述沿线泥层数据包括泥层厚度数据和泥层障碍物数据;
根据所述泥层厚度数据和泥层障碍物数据,对所述管线埋深数据进行误差补偿处理,得到符合所述管线铺设位置图像数据的实际管线埋深数据。
16.通过采用上述技术方案,由于管线是深埋在海底泥层中的, 难以通过单一的声呐探测获取到准确的管线铺设情况,因此,通过在拖鱼设备上集成磁力仪来采集海底管线的磁力变化,当磁力仪在管线上方通过时磁信号会发生明显变化,根据磁信号的变化情况来获取海底管线在海底泥层中的铺设位置数据,便于根据铺设位置数据在海底地形数据中进行标记,从而得到海底管线的铺设位置图像数据,且海底泥层的覆盖厚度、覆盖障碍物等都会影响海底管线的埋深数据,因此,通过对磁信号发生变化的管线铺设区域的沿线泥层数据的获取,通过泥层厚度数据和泥层障碍物数据,对管线埋深数据进行误差补偿,从而使补偿后的实际管线埋深数据更加贴合实际的海底地形,提高海底管线的图像反演精确度。
17.本技术的上述发明目的二是通过以下技术方案得以实现的:提供一种机器学习水深反演装置,所述机器学习水深反演装置包括:数据获取模块,用于获取拖鱼设备实时采集到的原始图像数据,其中,所述原始图像数据包括拖鱼的拖鱼导航数据和拖鱼姿态数据;数据处理模块,用于对所述拖鱼导航数据和拖鱼姿态数据进行预处理,得到海底跟踪数据;数据修正模块,用于对所述海底跟踪数据进行畸变修正处理,得到畸变补偿数据;反演图像生成模块,用于根据对所述畸变补偿数据进行目标物识别,并对识别后得到的海底图据进行拼接,生成海底反演图像成果图。
18.通过采用上述技术方案,由于拖鱼在按照预设导航路径进行数据采集的过程中,海底水流的阻力以及海底复杂多变的环境都会影响海底反演图像成果图实际呈现效果,拖鱼在导航路线上的高度变化和侧扫声呐设备的自身成像都会导致最终的海底反演图像存在畸变,因此,通过拖鱼在按照导航路线进行海底图像采集的过程中,实时获取拖鱼设备采集到的原始图像数据,包括拖鱼导航数据和拖鱼姿态数据,便于根据拖鱼导航数据和拖鱼姿态数据对海底实际图像数据进行采集,通过对拖鱼导航数据和拖鱼姿态数据的预处理,来获取拖鱼的海底跟踪数据,便于根据海底跟踪数据判断海底的亮度均衡情况的起始位置和数据校正的起始位置,通过人工时变增益、波束角度改正的方式对海底跟踪数据进行畸变修正处理,有助于通过畸变补偿数据对海底的目标物进行准确识别,并根据地理位置和拖鱼的采集时间,对识别后的海底图像数据进行拼接,从而得到海底反演图像成果图,有助于根据海底反演图像成果图准确地获知海底的实际图像。本技术通过对拖鱼采集的原始图像数据进行预处理和畸变补偿处理,来提高海底反演图像成果图与海底实际情况的拟合程度,减少图像畸变对海底图像反演结果的误差影响。
19.本技术在一较佳示例中可以进一步配置为:所述数据处理模块具体包括:数据解码子模块,用于将所述拖鱼导航数据和拖鱼姿态数据分别进行转码处理,得到可被计算机识别的拖鱼转码数据;数据平滑处理子模块,用于对拖鱼转码数据进行数据平滑处理,得到剔除异常数据后的回波强度数据;数据量化处理子模块,用于对所述回波强度数据进行量化处理,得到回波强度量化数据;
海底跟踪子模块,用于根据所述回波强度量化数据,对水体区和海底回波区之间的分界区域进行海底跟踪,得到海底跟踪数据。
20.通过采用上述技术方案,由于海底真实地形存在凹凸不平的情况,且海水的冲击容易使拖鱼产生摇摆,从而在拖鱼导航数据和拖鱼姿态数据中产生跳点或噪点等异常数据,影响对海底目标物的定位精度,因此,通过将拖鱼导航数据、拖鱼姿态数据进行数据转码处理,得到可被计算机识别的拖鱼转码数据,便于将拖鱼导航数据和拖鱼姿态数据导入计算机中进行数据处理,通过剔除拖鱼转码数据中的跳点或噪点来实现拖鱼转码数据的平滑处理,便于通过回波强度数据来提高对海底目标物的定位精度,在拖鱼设备将数据导入计算机的过程中,为了减少后续计算机处理和存储的运行压力,通过对回波强度数据进行量化处理,从而使回波强度量化数据满足计算机的运行需求,进而改善海底反演图像的成图对比度,且拖鱼设备进行数据采集的近端通常会形成一个低强度的水体区,水体区与海底回波区之间存在分界区域,该分界区域通常为图像亮度均衡调节的起始线,也是图像斜距地距校正的起始线,通过对该分界区域进行海底跟踪得到海底跟踪数据,便于通过海底跟踪数据对目标物的尺寸测量、图像斜距地距校正以及亮度均衡调节等提供图像校对标准,从而提高海底图像数据校对的准确性。
21.本技术的上述目的三是通过以下技术方案得以实现的:一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述机器学习水深反演方法方法的步骤。
22.本技术的上述目的四是通过以下技术方案得以实现的:一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述机器学习水深反演方法的步骤。
23.综上所述,本技术包括以下至少一种有益技术效果:1、通过拖鱼在按照导航路线进行海底图像采集的过程中,实时获取拖鱼设备采集到的原始图像数据,包括拖鱼导航数据和拖鱼姿态数据,便于根据拖鱼导航数据和拖鱼姿态数据对海底实际图像数据进行采集,通过对拖鱼导航数据和拖鱼姿态数据的预处理,来获取拖鱼的海底跟踪数据,便于根据海底跟踪数据判断海底的亮度均衡情况的起始位置和数据校正的起始位置,通过人工时变增益、波束角度改正的方式对海底跟踪数据进行畸变修正处理,有助于通过畸变补偿数据对海底的目标物进行准确识别,并根据地理位置和拖鱼的采集时间,对识别后的海底图像数据进行拼接,从而得到海底反演图像成果图,有助于根据海底反演图像成果图准确地获知海底的实际图像。本技术通过对拖鱼设备采集的原始图像数据进行预处理和畸变补偿处理,来提高海底反演图像成果图与海底实际情况的拟合程度,减少图像畸变对海底图像反演结果的误差影响;2、通过将拖鱼导航数据、拖鱼姿态数据进行数据转码处理,得到可被计算机识别的拖鱼转码数据,便于将拖鱼导航数据和拖鱼姿态数据导入计算机中进行数据处理,通过剔除拖鱼转码数据中的跳点或噪点来实现拖鱼转码数据的平滑处理,便于通过回波强度数据来提高对海底目标物的定位精度,在拖鱼设备将数据导入计算机的过程中,为了减少后续计算机处理和存储的运行压力,通过对回波强度数据进行量化处理,从而使回波强度量化数据满足计算机的运行需求,进而改善海底反演图像的成图对比度,且拖鱼设备进行数
据采集的近端通常会形成一个低强度的水体区,水体区与海底回波区之间存在分界区域,该分界区域通常为图像亮度均衡调节的起始线,也是图像斜距地距校正的起始线,通过对该分界区域进行海底跟踪得到海底跟踪数据,便于通过海底跟踪数据对目标物的尺寸测量、图像斜距地距校正以及亮度均衡调节等提供图像校对标准,从而提高海底图像数据校对的准确性;3、通过拖鱼设备的当前位置与待探测目标物的地理位置差,得到横向距离数据,便于根据横向距离数据对目标物图像的斜距地距进行校正,并根据横向距离数据在原始图像数据上进行待探测目标物的像素点标记,从而得到待探测目标物的校正图像数据,从而便于对待探测目标物的尺寸数据进行重新采样,通过对标记后的每个待探测目标物的像素点进行计算,得到校正图像上的每个待探测目标物的像素值,有助于对每个待探测目标物的像素值进行独立计算,提高待探测目标物的测探精度,根据每个待探测目标物的像素值对海底跟踪数据进行误差补偿,得到每个待探测目标物的畸变补偿数据,提高每个待探测目标物与海底地形图像的融合精确度。
附图说明
24.图1是本技术一实施例一种机器学习水深反演方法的实现流程图。
25.图2是本技术一实施例一种机器学习水深反演方法步骤s10的实现流程图。
26.图3是本技术一实施例一种机器学习水深反演方法步骤s30的实现流程图。
27.图4是本技术一实施例一种机器学习水深反演方法步骤s40的实现流程图。
28.图5是本技术一实施例一种机器学习水深反演方法步骤s303的另一实现流程图。
29.图6是本技术一实施例一种机器学习水深反演方法步骤s403的实现流程图。
30.图7是本技术一实施例一种机器学习水深反演装置的结构示意图。
31.图8是本技术一实施例实现机器学习水深反演方法的计算机设备内部结构示意图。
具体实施方式
32.以下结合附图对本技术作进一步详细说明。
33.在一实施例中,如图1所示,本技术公开了一种机器学习水深反演方法,具体包括如下步骤:s10:获取拖鱼设备实时采集到的原始图像数据,其中,原始图像数据包括拖鱼的拖鱼导航数据和拖鱼姿态数据。
34.具体的,通过拖鱼设备对待探测海域进行海底数据采集,得到携带有海底图像信息的xtf数据或jsf数据,将xtf数据或jsf数据导入计算机中进行数据处理,通过预设的数据传输通道如串口通信,获取拖鱼设备采集到的原始图像数据,其中,原始图像数据中的拖鱼导航数据为拖鱼设备在待探测海域中的航行数据,拖鱼姿态数据为拖鱼设备在海水中的实际游动波动幅度数据。
35.s20:对拖鱼导航数据和拖鱼姿态数据进行预处理,得到海底跟踪数据。
36.具体的,如图2所示,步骤s10具体包括:s101:将拖鱼导航数据和拖鱼姿态数据分别进行转码处理,得到可被计算机识别
的拖鱼转码数据。
37.具体的,将xtf数据或jsf数据导入处理软件中如vc 软件先转化为二进制格式,再将二进制格式的拖鱼导航数据和拖鱼姿态数据转换成txt文本格式,从而得到可被计算机识别的拖鱼转码数据。
38.s102:对拖鱼转码数据进行数据平滑处理,得到剔除异常数据后的回波强度数据。
39.具体的,在计算机上对拖鱼转码数据进行脉冲波形图显示,海底物质的材质、粗糙程度和与拖鱼的距离都会产生不同强度的波形数据,通过拖鱼转码数据的脉冲波形显示得到以采集时间为顺序的回波强度图,通过设定回波强度图的最高波动阈值和最低波动阈值,对回波强度图中的跳点或噪点进行剔除,从而得到趋于平滑的回波强度曲线,根据回波强度曲线得到以采集时间为顺序的回波强度数据,提高回波强度数据的定位精度。
40.s103:对回波强度数据进行量化处理,得到回波强度量化数据。
41.具体的,在将声呐数据转换成原始图像数据时,通常将数据进行量化处理,以便于计算机设备能更好地对图像进行绘制,通常是将数据量化至8-16bit,但是在拖鱼设备的换能器输出数据时,通常会将数据量化至11-64bit,量化后得到的数据较大,容易造成后续计算机的计算机及存储压力,因此,需要按照计算机对数据成图的绘制要求,对回波强度数据进行重新量化处理,使量化后的回波强度量化数据符合计算机的计算需求。
42.s104:根据回波强度量化数据,对水体区和海底回波区之间的分界区域进行海底跟踪,得到海底跟踪数据。
43.具体的,拖鱼设备在沿着导航数据航行的过程中,在拖鱼采集设备的近端与水体之间会形成一个低强度的水体区,容易对海底图像的绘制造成误差影响,通过回波强度量化数据,找到水体区和海底回波区之间的分界区域位置,并将对应的亮度均衡起始线、斜距地距校正起始线的位置从分界区域中间拟合至海底回波区的边界位置,从而根据分界区域的变化动态地调整起始线的位置来进行海底跟踪。
44.s30:对海底跟踪数据进行畸变修正处理,得到畸变补偿数据。
45.具体的,如图3所示,步骤s30包括以下步骤:s201:计算待探测目标物与探测拖鱼设备之间的横向距离,得到拖鱼当前位置和待探测目标物之间的横向距离数据。
46.具体的,根据探测拖鱼的当前位置的地理坐标,以及侧边换能器检测到的待探测目标物在海底的地理位置,从而根据位置差计算得到拖鱼当前位置和待探测目标物之间的横向距离数据。
47.s202:根据横向距离数据在原始图像数据进行像素点标记, 得到像素点标记后的校正图像数据。
48.具体的,由于探测拖鱼设备在进行声呐图像采集时,声波是按球面波的方式往外传播的,碰到待检测目标物如沉船、礁石、管线、海底养殖区、碍航物等,就会发生散射,其中的反向散射回波按原传播路线返回,因此根据探测拖鱼设备与待检测目标物之间的横向距离,判断探测拖鱼设备探测范围内的所有待探测目标物的地理位置,并在原始图像数据中进行对应的像素点标记,如根据每个待探测目标物的地理坐标点在海底地形图像上进行对应的标记,从而根据重新标记后的海底地形图像对原始图像数据进行校正,得到将待探测目标物进行像素点标记后的校正图像数据。
49.s203:对校正图像数据中的每个待探测目标物的像素点进行计算,得到校正图像数据中的每个待探测目标物的像素值。
50.具体的,根据待探测目标物的地理位置坐标,结合横向距离数据,对相邻坐标位置处的像素点进行差值运算,得到相邻位置的像素差,有助于根据像素差来判断待探测目标物的明暗程度和对比度差距,根据同一待探测目标物的像素差值合集绘制待探测目标物的校正图像,根据待探测目标物的校正图像的形状得到待探测目标物的占地面积和尺寸形状数据,根据占地面积与像素差值的乘积得到每个待探测目标物的像素值。
51.s204:根据像素值对海底跟踪数据进行误差补偿,得到每个待探测目标物的畸变补偿数据。
52.具体的,通过人工时变增益和波速角度改正相结合的方式,对海底跟踪数据进行误差补偿,如在得到校正图像之后,通过人工修改拖鱼设备的数据增益参数,对水体区和海底回波区之间的分界区域进行像素值补偿,使分界区域的像素值趋于平滑,并通过更改多波束的角度值来进一步对分界区域的像素值进行补偿,直到在误差范围内消除分界区域的像素值,将人工时变增益修改参数值和波速角度改正值作为畸变补偿数据输出,便于根据人工时变增益修改参数值和波速角度改正值对图像畸变进行修正,以及对拖鱼设备与待检测目标物之间的斜距进行校正。
53.s40:根据畸变补偿数据进行目标物识别,并对识别后得到的海底图像进行拼接,生成海底反演图像成果图。
54.具体的,通过拖鱼设备生成多条带侧扫声呐图像,相邻条带图像的灰度均衡度、水域调查过程中的水下定位精度和拖鱼的航行姿态等都对海底反演图像成果图的实际展示效果存在影响,如图4所示,步骤s40具体包括:s301:根据畸变补偿数据对探测目标物进行特征归类,得到符合海底目标物特征的目标物特征数据集。
55.具体的,对畸变补偿后的校正图像进行特征归类,包括待探测目标物的灰度、形态和形状等多个特征,并结合底质预先采样中的底质资料进行海底底质分类,根据采样结果确定待探测海底的底质类型和分布情况,并通过对畸变补偿后的校正图像中的每个待探测目标物的特征进行集合,如待探测目标物的地理坐标位置、形状大小及在待探测海底水域中的分布范围等多个目标物特征,根据拖鱼设备的探测时间顺序对多个目标物特征进行顺序存储得到符合海底目标物特征的目标物特征数据集。
56.s302:将目标特征数据集中对应的探测目标物位置在原始图像数据上进行标记,得到海底物质分布图集。
57.具体的,通过每个待探测目标物的目标特征数据集在拖鱼设备采集到的原始图像上进行目标特征物的标记,如根据每个待探测目标物的形状大小和地理坐标,在原始图像上查找到对应地理坐标的位置,并按照待探测目标物的形状大小在原始图像上绘制出对应的目标物图像,根据对探测范围内的多个待探测目标物的绘制合集得到海底物质分布图集。
58.s303:按照横向距离数据对识别后的海底物质分布图集进行图像拼接处理,得到海底反演图像成果图。
59.具体的,按照拖鱼设备的航行路线和数据采集时间顺序对海底物质分布图集进行
配准,并根据配准情况将海底物质分布图集中的每个条带的校正图像进行拼接,从而得到海底反演图像成果图。
60.在一实施例中,如图5所示,在按照横向距离数据对识别后的海底物质分布图集进行图像拼接处理,得到海底反演图像成果图之后,还包括:s401:获取待测水域的侧视声呐图像数据和多波束测探数据。
61.具体的,以拖鱼设备对待测水域的数据采集时间顺序和每个待探测目标物的地理坐标为基准,通过拖鱼在按照预设航行路线上扫测到的侧视声呐图像数据和多波束测探数据,其中,侧视声呐图像数据和多波束测探数据由集成在拖鱼设备上的声呐探测设备采集得到。
62.s402:根据侧视声呐图像数据和多波束测探数据,对海底反演图像成果图进行数据修正处理,得到修正后的海底地形数据。
63.具体的,通过侧视声呐图像数据和多波束测探数据结合拖鱼的姿态数据、导航航向数据、安装偏差,以及海水的声速、潮位以及探测穿的吃水深度等辅助信息,对海底反演图像成果图进行数据修正,从而得到海底地形数据。
64.s403:根据海底地形数据对海底管线的位置进行标记,并根据标记结果计算与海底管线对应的管线埋深数据。
65.具体的,如图6所示,步骤s403具体包括:s501:根据拖鱼导航数据,实时采集拖鱼设备所接收到的磁信号变化数据。
66.具体的,在拖鱼设备按照预设航行路线进行数据采集的过程中,根据拖鱼导航数据,通过集成在拖鱼设备上的磁力仪进行磁信号数据的采集,当磁力仪从海底管线上方通过时,在检测到海底管线时,磁力仪上的磁信号开始发生变化,从而得到磁信号变化数据。
67.s502:根据磁信号变化数据获取海底管线的海底的铺设位置数据,并在海底地形数据中进行标记,得到管线铺设位置图像数据。
68.具体的,根据航行路线上的磁信号变化数据,对磁信号发生变化的位置进行标记,从而得到海底管线的海底铺设位置,根据海底管线的铺设位置数据如管线的地理坐标,在海底地形图上寻找到对应坐标位置的位置点进行标记,从而得到标记后的管线铺设位置图像数据。
69.s503:获取管线铺设位置区域的沿线泥层数据,其中,沿线泥层数据包括泥层厚度数据和泥层障碍物数据。
70.具体的,通过集成在拖鱼设备上的声呐设备来采集管线铺设位置区域的沿线泥层数据,其中,沿线泥层数据包括泥层盖垫厚度、覆盖范围及铺设位置上方的障碍物等。
71.s504:根据泥层厚度数据和泥层障碍物数据,对管线埋深数据进行误差补偿处理,得到符合管线铺设位置图像数据的实际管线埋深数据。
72.具体的,根据当前采集位置的泥层厚度与上一采集位置的泥层厚度差,对管线埋深数据进行泥层厚度补偿,如在当前采集位置的管线埋深上增加对应的泥层厚度差值,使补偿后的实际管线埋深数据符合实际的泥层厚度,还通过对应的泥层障碍物数据判断障碍物对管线埋深数据的影响值,如障碍物的覆盖范围、覆盖深度等,在上一采集位置的管线埋深数据上增加对应的障碍物对管线埋深的覆盖深度值,从而使实际管线埋深数据符合实际的障碍物的覆盖深度情况,从而得到符合海底实际情况的实际管线埋深数据。
73.应理解,上述实施例中各步骤的序号的大小并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本技术实施例的实施过程构成任何限定。
74.在一实施例中,提供一种机器学习水深反演装置,该机器学习水深反演装置与上述实施例中机器学习水深反演方法一一对应。如图7所示,该机器学习水深反演装置包括数据获取模块、数据获取模块、数据修正模块和反演图像生成模块。各功能模块详细说明如下:数据获取模块,用于获取拖鱼设备实时采集到的原始图像数据,其中,原始图像数据包括拖鱼的拖鱼导航数据和拖鱼姿态数据。
75.数据处理模块,用于对拖鱼导航数据和拖鱼姿态数据进行预处理,得到海底跟踪数据。
76.数据修正模块,用于对海底跟踪数据进行畸变修正处理,得到畸变补偿数据。
77.反演图像生成模块,用于根据对畸变补偿数据进行目标物识别,并对识别后得到的海底图据进行拼接,生成海底反演图像成果图。
78.优选的,数据处理模块具体包括:数据解码子模块,用于将拖鱼导航数据和拖鱼姿态数据分别进行转码处理,得到可被计算机识别的拖鱼转码数据。
79.数据平滑处理子模块,用于对拖鱼转码数据进行数据平滑处理,得到剔除异常数据后的回波强度数据。
80.数据量化处理子模块,用于对回波强度数据进行量化处理,得到回波强度量化数据。
81.海底跟踪子模块,用于根据回波强度量化数据,对水体区和海底回波区之间的分界区域进行海底跟踪,得到海底跟踪数据。
82.优选的,数据修正模块具体包括:距离计算子模块,用于计算待探测目标物与探测拖鱼设备之间的横向距离,得到拖鱼当前位置和待探测目标物之间的横向距离数据。
83.像素点标记子模块,用于根据横向距离数据在原始图像数据进行像素点标记,得到像素点标记后的校正图像数据。
84.像素值计算子模块,用于对校正图像数据中的每个待探测目标物的像素点进行计算,得到校正图像数据中的每个待探测目标物的像素值。
85.畸变补偿子模块,用于根据像素值对海底跟踪数据进行误差补偿,得到每个待探测目标物的畸变补偿数据。
86.优选的,反演图像生成模块具体包括:特征归类子模块,用于根据畸变补偿数据对探测目标物进行特征归类,得到符合海底目标物特征的目标物特征数据集。
87.位置标记子模块,用于将目标特征数据集中对应的探测目标物位置在原始图像数据上进行标记,得到海底物质分布图集。
88.图像拼接子模块,用于按照横向距离数据对识别后的海底物质分布图集进行图像拼接处理,得到海底反演图像成果图。
89.优选的,反演图像生成模块还包括:辅助数据获取子模块,用于获取待测水域的侧视声呐图像数据和多波束测探数据。
90.数据修正子模块,用于根据侧视声呐图像数据和多波束测探数据,对海底反演图像成果图进行数据修正处理,得到修正后的海底地形数据。
91.管线埋深计算子模块,用于根据海底地形数据对海底管线的位置进行标记,并根据标记结果计算与海底管线对应的管线埋深数据。
92.优选的,管线埋深计算子模块具体包括:磁信号采集单元,用于根据拖鱼导航数据,实时采集拖鱼设备所接收到的磁信号变化数据。
93.管线标记单元,用于根据磁信号变化数据获取海底管线的海底的铺设位置数据,并在海底地形数据中进行标记,得到管线铺设位置图像数据。
94.泥层数据获取单元,用于获取管线铺设位置区域的沿线泥层数据,其中,沿线泥层数据包括泥层厚度数据和泥层障碍物数据。
95.埋深补偿单元,用于根据泥层厚度数据和泥层障碍物数据,对管线埋深数据进行误差补偿处理,得到符合管线铺设位置图像数据的实际管线埋深数据。
96.关于机器学习水深反演装置的具体限定可以参见上文中对于机器学习水深反演方法的限定,在此不再赘述。上述机器学习水深反演装置中的各个模块可全部或部分通过软件、硬件及其组合来实现。上述各模块可以硬件形式内嵌于或独立于计算机设备中的处理器中,也可以以软件形式存储于计算机设备中的存储器中,以便于处理器调用执行以上各个模块对应的操作。
97.在一个实施例中,提供了一种计算机设备,该计算机设备可以是服务器,其内部结构图可以如图8所示。该计算机设备包括通过装置总线连接的处理器、存储器、网络接口和数据库。其中,该计算机设备的处理器用于提供计算和控制能力。该计算机设备的存储器包括非易失性存储介质、内存储器。该非易失性存储介质存储有操作装置、计算机程序和数据库。该内存储器为非易失性存储介质中的操作装置和计算机程序的运行提供环境。该计算机设备的数据库用于存储拖鱼设备采集到的海底图像数据以及海底反演图像成果图。该计算机设备的网络接口用于与外部的终端通过网络连接通信。该计算机程序被处理器执行时以实现一种机器学习水深反演方法。
98.在一个实施例中,提供了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现上述机器学习水深反演方法的步骤。
99.本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一非易失性计算机可读取存储介质中,该计算机程序在执行时,可包括如上述各方法的实施例的流程。其中,本技术所提供的各实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和/或易失性存储器。非易失性存储器可包括只读存储器(rom)、可编程rom(prom)、电可编程rom(eprom)、电可擦除可编程rom(eeprom)或闪存。易失性存储器可包括随机存取存储器(ram)或者外部高速缓冲存储器。作为说明而非局限,ram以多种形式可得,诸如静态ram(sram)、动态ram(dram)、同步dram(sdram)、双数据率sdram(ddrsdram)、增强
型sdram(esdram)、同步链路(synchlink) dram(sldram)、存储器总线(rambus)直接ram(rdram)、直接存储器总线动态ram(drdram)、以及存储器总线动态ram(rdram)等。
100.所属领域的技术人员可以清楚地了解到,为了描述的方便和简洁,仅以上述各功能单元、模块的划分进行举例说明,实际应用中,可以根据需要而将上述功能分配由不同的功能单元、模块完成,即将所述装置的内部结构划分成不同的功能单元或模块,以完成以上描述的全部或者部分功能。
101.以上所述实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围,均应包含在本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。