1.本技术涉及交通技术领域,尤其是一种附着式可自动调节的智能人行道交通信号灯。
背景技术:
2.行人闯红灯是各类交通违法中最普遍的一种交通违法行为,严重影响了交通安全。目前为了警示行人不要闯红灯,在一些人行道前,尤其是重要路口的人行道前通常会设置额外的抓拍装置,这些抓拍装置用于抓拍闯红灯行人并实时显示图像,以起到警示的效果。安装这一类抓拍装置也会占用较大的路口区域,而且这类抓拍装置在安装时通常需要反复调试安装角度和位置以保证能够实现抓拍效果,在空间有限的路口区域难度较大。
技术实现要素:
3.本技术人针对上述问题及技术需求,提出了一种附着式可自动调节的智能人行道交通信号灯,本技术的技术方案如下:
4.一种附着式可自动调节的智能人行道交通信号灯,该智能人行道交通信号灯包括立杆、信号灯本体、第一旋转装置和显示屏,信号灯本体上包括灯体以及相机模组,信号灯本体通过第一旋转装置安装在立杆上,显示屏安装在立杆上;控制器连接并控制第一旋转装置、相机模组、灯体以及显示屏,相机模组的视场方向与灯体朝向相同方向;
5.智能人行道交通信号灯通过立杆安装在人行道处的路口,安装完成的初始化调试状态下,控制器控制第一旋转装置带动信号灯本体绕着立杆周向旋转,并在旋转过程中通过相机模组获取各个周向位置处的实时环境图像;
6.控制器对各个周向位置处的实时环境图像进行图像识别确定实时环境图像中的人行道区域,将拍摄到的实时环境图像中的人行道区域位于实时环境图像的中央区域的周向位置作为目标周向位置,控制器控制第一旋转装置带动信号灯本体转动至目标周向位置处固定并完成初始化调试,使得信号灯本体朝向人行道区域;
7.在智能交通信号灯完成初始化调试后的工作过程中,控制器按照配时方案控制灯体工作并通过相机模组采集工作图像,控制器若在红灯配时阶段内采集到的工作图像中识别到人行道区域内有行人,则通过显示屏显示工作图像中的行人。
8.其进一步的技术方案为,显示屏为裸眼3d显示屏,当控制器在红灯配时阶段内采集到的工作图像中识别到人行道区域内有行人时,控制器还通过裸眼3d显示屏播放交通事故模拟预警视频。
9.其进一步的技术方案为,裸眼3d显示屏通过第二旋转装置安装在立杆上,控制器还连接并控制第二旋转装置,当控制器在红灯配时阶段内采集到的工作图像中识别到人行道区域内的行人时,确定行人在人行道区域的相对位置并控制第二旋转装置带动裸眼3d显示屏旋转至朝向行人。
10.其进一步的技术方案为,控制器将模拟交通事故动画叠加在采集到的工作图像上
形成警示视频并通过裸眼3d显示屏进行播放。
11.其进一步的技术方案为,在智能交通信号灯完成初始化调试后的工作过程中,若控制器检测到采集到的工作图像中的人行道区域偏离工作图像的中央区域超出预定偏离阈值,则控制器控制第一旋转装置带动信号灯本体绕着立杆周向旋转并重新确定目标周向位置,并将信号灯本体调整至朝向重新确定的目标周向位置。
12.其进一步的技术方案为,控制器还与警务中心建立通信连接,在智能交通信号灯完成初始化调试后的工作过程中,控制器通过相机模组采集工作图像,当对工作图像进行人脸识别匹配识别到预定管控人员时,向警务中心推送报警信息。
13.其进一步的技术方案为,智能人行道交通信号灯还包括若干个显示灯珠排列形成的灯带,控制器连接并控制显示灯珠,控制器按照当前的配时阶段的倒计时控制灯带中被点亮的显示灯珠的数量依次递减,且被点亮的显示灯珠按照当前的配时阶段显示相应的颜色。
14.其进一步的技术方案为,第一旋转装置包括壳体、转轴、第一旋转电机和锁紧结构,壳体固定在立杆的外壁,转轴竖直设置在壳体内,锁紧结构包括对向设置在转轴两侧的两个夹持头,两个夹持头分别通过电动伸缩杆固定在壳体内且伸缩方向垂直于转轴;信号灯本体安装在转轴上,第一旋转电机的电机轴连接转轴,控制器连接并控制第一旋转电机以及电动伸缩杆;
15.控制器控制电动伸缩杆带动夹持头回缩与转轴分离实现解锁,并控制第一旋转电机驱动转轴转动以带动信号灯本体周向旋转;当调试完成后,控制器控制电动伸缩杆带动夹持头外伸夹持住转轴实现锁定。
16.本技术的有益技术效果是:
17.本技术公开了一种附着式可自动调节的智能人行道交通信号灯,该智能人行道交通信号灯将信号灯本体与显示屏集成在一起,使得利用智能人行道交通信号灯既可以实现信号灯功能、也可以实现抓拍功能,提高了集成度,无需载安装额外的抓拍装置,可以尽量减少对路口空间的占用。而且该智能人行道交通信号灯在安装完成的初始化调试阶段,可以自动调节灯体、相机模组和显示屏朝向人行道区域,无需人为反复调试,提高了安装调试的效率。
18.该智能人行道交通信号灯采用裸眼3d显示屏,不仅可以显示抓拍到的闯红灯行人,还可以播放交通事故模拟预警视频更贴合实际场景,预警视频的还原度更高。裸眼3d显示屏还可以跟随闯红灯行人转动,实现随动预警。
附图说明
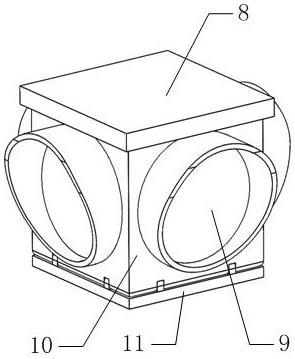
19.图1是本技术一个实施例中的智能人行道交通信号灯的结构示意图。
20.图2是一个实施例中的第一旋转装置的结构示意图。
具体实施方式
21.下面结合附图对本技术的具体实施方式做进一步说明。
22.本技术公开了一种附着式可自动调节的智能人行道交通信号灯,请参考图1,该智能人行道交通信号灯包括立杆1、信号灯本体2、第一旋转装置3和显示屏4。信号灯本体1上
包括灯体5以及相机模组6,对于人行道交通信号灯来说,信号灯本体1上一般可以包括两个灯体11,一个灯体11用于显示红灯或绿灯,另一个灯体11用于显示倒计时,如图1所示。相机模组6的视场方向与灯体5朝向相同方向,控制器连接相机模组6和灯体5。
23.信号灯本体2通过第一旋转装置3安装在立杆1上且可以周向旋转,控制器连接并控制第一旋转装置3。在一个实施例中,第一旋转装置3包括壳体31、转轴32和第一旋转电机33。壳体31固定在立杆1的外壁,转轴32竖直设置在壳体31内。信号灯本体1安装在转轴32上,第一旋转电机33的电机轴连接转轴32,控制器连接并控制第一旋转电机33转动,即可通过转轴32带动信号灯本体2周向旋转。
24.进一步的,如图2所示,第一旋转装置3还包括锁紧结构34,锁紧结构34包括对向设置在转轴两侧的两个夹持头34a,两个夹持头34a分别通过电动伸缩杆34b固定在壳体31内且伸缩方向垂直于转轴32。控制器还连接并控制电动伸缩杆34b。当电动伸缩杆34b带动夹持头34a伸出时,两侧的夹持头34a夹持住转轴从而锁紧转轴32无法转动,如图2以此状态为例。当电动伸缩杆34b带动夹持头34a回缩时,两侧的夹持头34a松开转轴32可以自由转动。
25.智能人行道交通信号灯通过立杆1安装在人行道处的路口,安装完成的初始化调试状态下:
26.控制器控制第一旋转装置3带动信号灯本体2绕着立杆1周向旋转,并在旋转过程中通过相机模组6获取各个周向位置处的实时环境图像。当第一旋转装置3包含锁紧结构34时,默认状态下电动伸缩杆34b带动夹持头34a伸出锁紧转轴32,则控制器首先控制电动伸缩杆34b带动夹持头34a回缩与转轴32分离实现解锁,然后控制第一旋转电机33驱动转轴32转动以带动信号灯本体2周向旋转。
27.控制器对各个周向位置处的实时环境图像进行图像识别确定实时环境图像中的人行道区域,将拍摄到的实时环境图像中的人行道区域位于实时环境图像的中央区域的周向位置作为目标周向位置,然后控制器控制第一旋转装置3带动信号灯本体2转动至目标周向位置处固定并完成初始化调试,使得信号灯本体2朝向人行道区域。一种实现方式是,在旋转过程中的每个周向位置处,控制器检测拍摄到的实时环境图像中的人行道区域是否位于实时环境图像的中央区域,若位于中央区域,则直接停止转动完成调试。另一种实现方式是,控制器控制信号灯本体2在预设的旋转范围内旋转采集所有周向位置处的实时环境图像,预设的旋转范围比如360度或者120度,确定目标周向位置后再控制信号灯本体2旋转到特定的目标周向位置。当调试完成后,控制器控制电动伸缩杆带动夹持头外伸夹持住转轴实现锁定,避免信号灯本体后续再转动。
28.显示屏4安装在立杆1上,控制器连接显示屏4。在一个实施例中,显示屏4与信号灯本体2固定在一起,由第一旋转装置带动实现同步旋转,因此在调试完成后,显示屏4也朝向人行道区域。在智能交通信号灯完成初始化调试后的工作过程中,控制器按照配时方案控制灯体5工作并通过相机模组6采集工作图像,控制器若在红灯配时阶段内采集到的工作图像中识别到人行道区域内有行人,则通过显示屏4显示工作图像中的行人,实现闯红灯抓拍功能。另外该智能人行道交通信号灯还包括扬声器,在红灯配时阶段内采集到的工作图像中识别到人行道区域内有行人时,还通过扬声器播放警示语音。
29.在一个实施例中,显示屏4为裸眼3d显示屏,当控制器在红灯配时阶段内采集到的工作图像中识别到人行道区域内有行人时,控制器还通过裸眼3d显示屏播放交通事故模拟
预警视频,以起到警示的作用,而裸眼3d显示屏的立体显示效果能够更好的警示到闯红灯的行人。可选的,控制器将模拟交通事故动画叠加在采集到的工作图像上形成警示视频并通过裸眼3d显示屏进行播放,也即以实际工作图像的场景来叠加显示形成交通事故模拟预警视频,从而使得交通事故模拟预警视频更贴合实际场景,还原度更高。
30.由于裸眼3d显示屏在不同的角度的显示效果不同,因此在另一个实施例中,显示屏4通过第二旋转装置7安装在立杆1上,控制器还连接并控制第二旋转装置。与第一旋转装置类似,第二旋转装置7也包括壳体、转轴和第二旋转电机,第二旋转装置7的壳体固定在立杆1的外壁,转轴竖直设置在壳体内,显示屏4安装在第二旋转装置的转轴上,第二旋转电机的电机轴连接转轴,控制器连接并控制第二旋转电机转动,即可通过转轴带动显示屏4周向旋转。在初始化调试阶段,控制器控制第一旋转装置和第二旋转装置同步转动,使得调试完成后显示屏4朝向人行道区域,在智能交通信号灯完成初始化调试后的工作过程中,第一旋转装置通过内置的锁紧结构34锁紧,而第二旋转装置仍处于自由转动状态,当控制器在红灯配时阶段内采集到的工作图像中识别到人行道区域内的行人时,控制器确定行人在人行道区域的相对位置并控制第二旋转装置带动裸眼3d显示屏旋转至朝向行人,使得显示屏附着跟随闯红灯行人转动,使得闯红灯行人对裸眼3d显示屏播放的交通事故模拟预警视频有更优的观看效果,实现随动预警,从而有助于强化交通事故模拟预警视频的警示效果。
31.在智能交通信号灯完成初始化调试后的工作过程中,若控制器检测到采集到的工作图像中的人行道区域偏离工作图像的中央区域超出预定偏离阈值,则控制器控制第一旋转装置3带动信号灯本体2绕着立杆1周向旋转并重新确定目标周向位置,并将信号灯本体2调整至朝向重新确定的目标周向位置,重新调试的方法与初始化调试的方法类似,也即在使用过程中,若信号灯本体2在各种外界因素影响下发生偏移,也可以及时调整。
32.另外,控制器还与警务中心建立通信连接,在智能交通信号灯完成初始化调试后的工作过程中,控制器通过相机模组采集工作图像,当对工作图像进行人脸识别匹配识别到预定管控人员时,向警务中心推送报警信息。其中预定管控人员可以是逃犯、疑犯或者失信人员等等。
33.智能人行道交通信号灯还包括若干个显示灯珠排列形成的灯带8,等待8可以设置在信号灯本体2上,或者与显示屏4固定在一起,如图1以后者为例。控制器连接并控制显示灯珠,控制器按照当前的配时阶段的倒计时控制灯带中被点亮的显示灯珠的数量依次递减,且被点亮的显示灯珠按照当前的配时阶段显示相应的颜色。
34.以上所述的仅是本技术的优选实施方式,本技术不限于以上实施例。可以理解,本领域技术人员在不脱离本技术的精神和构思的前提下直接导出或联想到的其他改进和变化,均应认为包含在本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。