1.本发明属于农产品检测技术领域,具体是一种基于深度学习的鸡蛋缺陷检测分拣装置。
背景技术:
2.随着生活水平不断提高,人们对禽蛋类食品的需求量与日俱增,尤其是鸡蛋,已经是日常生活中经常摄入的食物。然而禽蛋外壳非常脆弱,在生产运输过程中因外力作用容易出现破损、裂纹等情况,这些情况往往会导致禽蛋的内部出现污损,如果不及时筛选出这类有问题的鸡蛋,一方面给鸡蛋的进一步深加工带来不便利,另一方面造成食品安全隐患。因此如何高效的检测并筛选出外壳破损、裂纹以及内部有污损的鸡蛋是非常有必要的。现有的食品加工采用人工筛选或是机器检测。人工筛选,工作效率低,增加了企业的生产成本,且长期工作易于导致人的视觉疲劳,造成目测的准确率降低。目前机器检测主要采取:(1)、敲击震动的声学特征进行检测,但这类设备存在外界噪声、蛋壳厚度差异和敲击次数影响准确度的缺点;(2)、在实验室建立压力仓,使的裂纹更明显,更易于检测,仅在实验室使用。(3)、基于机器视觉检测技术设备,虽然这类设备检测速度快,但是,依旧存在一系列问题:
①
硬件成本高,采用视觉高速检测,对设备的传动装置提出了较高的要求,需要高速通过的同时,还需不断转动,确保全部外观被相机扫描,对设备的传动装置提出了较高要求;
②
对光源要求高,高速检测,要保证检测精度,必须确保光源不受外界影响,以确保派出高质量照片,为后续的视觉检测准确,提供保障;
③
计算量大。高速检测,每秒钟拍摄量很大,对计算机显卡、控制设备都提出非常高的要求;
④
维护、保养成本高,视觉检测设备,属于高精密设备,对环境提出较高要求。另外,一旦发生损坏或故障,维护成本较高;
⑤
体积大,比较占用空间。可见,基于机器视觉检测技术设备存在成本高,对操作人员技术水平要求较高,比较适用于大型企业。但是,中国大量加工为中小企业,甚至手工作坊。因此,这些大型设备不利于推广、应用。
技术实现要素:
3.本发明的目的在于提供一种基于深度学习的鸡蛋缺陷检测分拣装置,不仅可以快速准确地检测和分选鸡蛋,而且体积小。
4.为了实现上述目的,本发明采用以下技术方案予以实现:
5.一种基于深度学习的鸡蛋缺陷检测分拣装置,包括机架,机架的上端设有料斗、传送装置、检测装置和分选装置;
6.所述料斗固定安装在机架上并位于传送装置的后上方,料斗上表面设有供鸡蛋滚落至传送装置的倾斜向下的通道;
7.所述传送装置包括传送带,传送带的表面沿其传动方向固定安装有至少一行均匀排列的隔片,每行隔片的两侧均设有同步且同方向转动以带动鸡蛋周转的转动辊,转动辊与料斗上表面的通道位置相对,前后相邻两个隔片与位于其两侧转动辊构成一个容纳鸡蛋
的独立空腔;
8.所述检测装置包括设置在传送带上方的用于给鸡蛋拍照的工业相机,传送带的下方设有光源,光源位于工业相机的正下方,工业相机与计算机连接,计算机将工业相机获取的图像经过深度学习去噪后与目标图片对比从而判断有无缺陷;
9.所述分选装置包括设置在传送带尾端的倾斜向下设置的输送道,输送道的位置与转动辊的位置相对应,输送道的尾端设有分选料斗,分选料斗的开口处盖有分选板,分选板通过转轴与输送道转动连接,分选板的转轴与伺服电机的输出轴连接,伺服电机与控制器电连接,控制器与计算机电连接,计算机判断出鸡蛋有缺陷时发送指令给控制器使伺服电机转动从而驱动分选板向下翻转以打开分选料斗的开口,计算机判断出鸡蛋无缺陷时发送指令给控制器使伺服电机反向转动从而驱动分选板向上翻转以关闭分选料斗的开口供合格鸡蛋通过。
10.进一步地,所述传送装置包括与机架转动连接的主动滚筒和从动滚筒以及固定安装在机架上的第一电机,第一电机的输出轴通过联轴器连接有主动带轮,主动滚筒的中心轴上固定连接有从动带轮,主动带轮和从动带轮通过皮带传动连接,主动滚筒和从动滚筒通过传送带传动连接。
11.进一步地,所述机架的两侧分别固定安装有左侧板和右侧板;
12.所述主动滚筒和从动滚筒均与左侧板和右侧板转动连接,传送带位于左侧板和右侧板之间。
13.进一步地,所述左侧板和右侧板上固定安装有支撑架,转动辊的两端均与支撑架转动连接;
14.所述机架上固定安装有第二电机,转动辊与第二电机的输出轴通过联轴器连接,第二电机与控制器电连接。
15.进一步地,所述转动辊共有四组,每组中的两根转动辊分别位于一行隔片两侧。
16.进一步地,所述检测装置还包括与左侧板和右侧板固定连接的相机罩,工业相机固定安装在相机罩内顶壁上。
17.进一步地,所述转动辊表面包裹有一层橡胶。
18.进一步地,所述隔片垂直安装在传送带的表面。
19.进一步地,所述分选料斗包括上层收纳框和下层收纳框,上层收纳框与输送道固定连接,且其底板设有与输送道位置相对的开口;
20.所述下层收纳框的两侧与上层收纳框固定连接。
21.进一步地,所述下层收纳框的靠近输送道的一端设有倾斜的挡板。
22.本发明具有如下有益效果:
23.检测装置正下方的传送带底部设有光源,光源照射鸡蛋使其通透,传送装置的隔片推动鸡蛋前进,并依靠转动辊转动时的摩擦力带动鸡蛋自转,使得工业相机能够实时且无死角对蛋壳一周进行拍照是否有破损和裂缝,并通过光照检测鸡蛋内部是否有污损,工业相机将获取的照片传输给计算机,计算机通过深度深度学习的方法识别鸡蛋外壳是否有裂纹和破损以及鸡蛋内部有无污损等问题,计算机判断出鸡蛋有缺陷时会发送指令给控制器使伺服电机转动从而驱动分选板向下翻转以打开分选料斗的开口,计算机判断出鸡蛋无缺陷时会发送指令给控制器使伺服电机反向转动从而驱动分选板向上翻转以关闭分选料
斗的开口供合格鸡蛋通过,从而实现鸡蛋的自动检测和分拣。可见,本装置不仅结构简单、体积小,而且检测效率和准确率较高,对应用环境要求低,从而降低了检测成本,保证了企业的生产收益,具有较高的市场应用价值。
附图说明
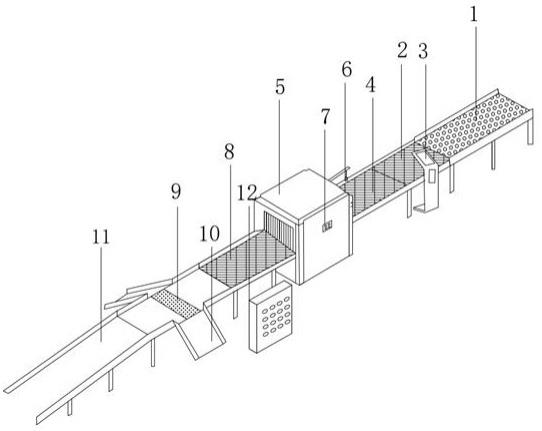
24.图1:本发明的整体结构示意图;
25.图2:本发明的传送装置的局部放大图;
26.图3:本发明的传送装置的局部俯视图;
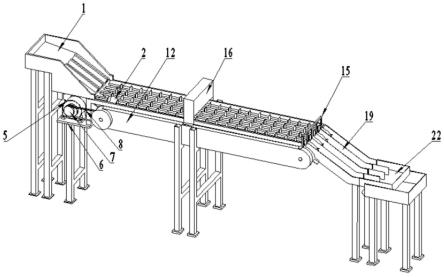
27.图4:本发明的传送装置的整体结构示意图;
28.图5:本发明的传送带结构示意图;
29.图6:本发明的翻滚装置的结构示意图;
30.图7:本发明检测装置的剖视结构示意图;
31.图8:本发明的传送装置与输送道的连接结构示意图;
32.图9:本发明的分选装置的结构示意图一;
33.图10:本发明的分选装置的结构示意图二;
34.图11:本发明的分选料斗的结构示意图;
35.图12:本发明的分选板的局部放大图;
36.图中:1、料斗;2、鸡蛋;3、传送带;3-1、隔片;4、转动辊;5、第一电机;6-机架;7、主动带轮;8、皮带;9、从动带轮;10、主动滚筒;11、从动滚筒;12、左侧板;13、右侧板;14、第二电机;15、支撑架;16、相机罩;17、工业相机;18、光源;19、输送道;20、分选板;21、伺服电机;22、分选料斗。
具体实施方式
37.下面结合实施例对本发明的具体内容做进一步详细解释说明,但不作为对本发明的限定。
38.如图1-图8所示,一种基于深度学习的鸡蛋缺陷检测分拣装置,包括机架6,机架6的上端设有料斗1、传送装置、检测装置和分选装置;所述料斗1固定安装在机架6上并位于传送装置的后上方,料斗1上表面设有供鸡蛋滚落至传送装置的倾斜向下的四个通道;
39.所述传送装置包括固定连接在机架6左侧的左侧板12和固定在机架6右侧的右侧板13,左侧板12和右侧板13之间设有主动滚筒10和从动滚筒11,主动滚筒10和从动滚筒11均与左侧板12和右侧板13转动连接,主动滚筒10和从动滚筒11通过传送带3传动连接,机架6上固定安装有第一电机5,第一电机5的输出轴通过联轴器连接有主动带轮7,主动滚筒10的中心轴上固定连接有从动带轮9,主动带轮7和从动带轮9通过皮带8传动连接,第一电机5转动时带动主动带轮7转动,主动带轮7通过皮带8传动从动带轮9转动从而驱动主动滚筒10转动,在主动滚筒10和从动滚筒11的配合下,传送带3向前运动,传送带3的表面沿其传动方向固定安装有四行隔片3-1,每行中的若干个隔片3-1均匀排列,隔片3-1垂直安装在传送带3的表面,每行隔片3-1的两侧设有带动鸡蛋2周转的转动辊4;所述左侧板12和右侧板13上固定安装有支撑架15,转动辊4的两端均与支撑架15转动连接,转动辊4共设有四组,所述机架6上设有多个第二电机14,第二电机14的输出轴通过联轴器与转动辊4连接,第二电机14
与控制器连接,通过控制器控制第二电机14,使得位于隔片3-1两侧的一组转动辊4同步且同方向转动,每组转动辊4与料斗1上表面的通道位置相对,相邻两个隔片3-1与位于其两侧的一组转动辊4构成一个容纳鸡蛋2的独立空腔,工人将鸡蛋2放入料斗1,鸡蛋2沿着料斗1上表面的通道向下滚落至独立空腔内,传送带3向前运动时带动隔片3-1推动鸡蛋2向前运动,转动辊4转动时产生的摩擦力带动鸡蛋2做周转运动,从而使鸡蛋一边向前运动一边周转;
40.如图5、图7所示,所述检测装置包括与左侧板12和右侧板13固定连接的相机罩16,相机罩16的内顶壁上固定安装有用于给鸡蛋2拍照的工业相机17,传送带3的下方通过支架安装有光源18,光源18位于工业相机17的正下方,工业相机17与计算机连接,工业相机17获取鸡蛋转动一周的蛋壳图像和鸡蛋内部图像,并将图像传送给计算机,计算机先对图像进行去噪处理和图像增强处理,再将处理后的图像传入基于深度学习的语义分割模型中,语义分割模型可以剔除背景图像,仅保留鸡蛋图像,再将剔除背景干扰后的鸡蛋图像传入到基于深度学习的目标检测模型中,将传入的图像与目标检测模型进行对比,从而判断鸡蛋有无缺陷,其中目标检测模型是基于鸡蛋外壳破损和裂纹以及内部污损的标签训练后获得的;
41.如图1、图9-图12所示,所述分选装置包括设置在传送带3尾端的倾斜向下设置的四个输送道19,输送道19的位置,每个输送道19的位置均与一组转动辊4的位置相对应,输送道19的尾端设有分选料斗22,分选料斗22包括上层收纳框和下层收纳框,上层收纳框与输送道19固定连接,下层收纳框的两侧与上层收纳框固定连接,上层收纳框的底板开设有四个开口,每个开口分别对应地设置在输送道19尾端,开口处盖有分选板20,分选板20通过转轴与输送道19转动连接,分选板20的转轴与伺服电机21的输出轴连接,伺服电机21与控制器连接,控制器与计算机连接,计算机判断出鸡蛋2有缺陷时会发送指令给控制器,控制器启动伺服电机21转动从而驱动分选板20向下翻转以打开上层收纳框的开口,计算机判断出鸡蛋2无缺陷时,会发送指令给控制器,使伺服电机21反向转动从而驱动分选板20向上翻转以关闭上层收纳框的开口,分选板20盖住开口后与上层收纳框的底板平齐,供合格鸡蛋通过,从而实现鸡蛋2的检测和分选。
42.优选的,所述转动辊4表面包裹有一层橡胶,可以增加转动辊4与鸡蛋2的摩擦力,并起到保护鸡蛋壳的作用。
43.如图11所示,优选的,所述下层收纳框的靠近输送道19的一端设有倾斜的挡板,可以防止劣质的鸡蛋2从下层收纳框滚出。
44.本发明的工作原理如下:
45.工人每隔一段时间将鸡蛋2放入料斗1,鸡蛋2沿着料斗1上表面的通道向下滚落至由相邻两个隔片3-1与位于其两侧的一组转动辊4构成的独立空腔内,传送带3向前运动时带动隔片3-1推动鸡蛋2向前运动,一组转动辊4转动时产生的摩擦力带动鸡蛋2做周转运动,从而使鸡蛋2一边向前运动一边周转,当鸡蛋2处于工业相机下方区域时,在底部光源18的照射下,工业相机17获取鸡蛋转动一周的蛋壳图像和鸡蛋内部图像,并将图像传送给计算机,计算机先对图像进行去噪处理和图像增强处理,再将处理后的图像传入基于深度学习的语义分割模型中,语义分割模型可以剔除背景图像,仅保留鸡蛋图像,再将剔除背景干扰后的鸡蛋图像传入到基于深度学习的目标检测模型中,将传入的图像与目标检测模型进
行对比,从而判断鸡蛋有无缺陷,计算机判断出鸡蛋2有缺陷时会发送指令给控制器,控制器启动伺服电机21转动从而驱动分选板20向下翻转以打开分选料斗22上层收纳框的开口,计算机判断出鸡蛋2无缺陷时,会发送指令给控制器,使伺服电机21反向转动从而驱动分选板20向上翻转以关闭上层收纳框的开口,分选板20盖住开口后与上层收纳框的底板平齐,供合格鸡蛋通过,从而实现鸡蛋2的检测和分选。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。