技术特征:
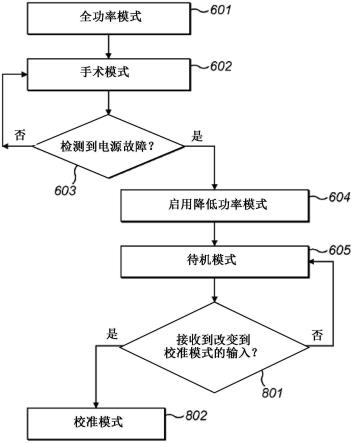
1.一种用于手术机器人系统的控制系统,所述手术机器人系统包括:具有外科医生输入装置的远程外科医生控制台;和手术机器人臂,所述手术机器人臂包括从基座延伸到用于附接到手术器械的末端的一系列关节,所述手术机器人臂可以全功率模式和降低功率模式操作,在所述全功率模式中,所述手术机器人臂的关节由第一电源供电,在所述降低功率模式中,所述手术机器人臂的关节由第二电源供电,所述控制系统被配置成:当所述手术机器人臂以所述全功率模式操作时,通过将所述外科医生输入装置的移动转换成用于移动所述手术机器人臂的关节的控制信号而在手术模式中控制所述手术机器人臂;检测所述第一电源的电源故障;响应于检测到所述电源故障,启用所述降低功率模式,并且将对所述手术机器人臂的控制从所述手术模式转变到待机模式;当处于所述降低功率模式时,从位于所述手术机器人臂上或邻近所述手术机器人臂或位于所述外科医生控制台上的用户输入接收命令;以及响应于接收到所述命令,将对所述手术机器人臂的控制从所述待机模式转变到校准模式。2.根据权利要求1所述的控制系统,其被配置成在所述校准模式中不将所述外科医生输入装置的移动转换成用于移动所述手术机器人臂的关节的控制信号。3.根据权利要求1或2所述的控制系统,其被配置成在所述校准模式中:检测施加到所述手术机器人臂的外部力;以及向所述手术机器人臂发送控制信号以移动所述手术机器人臂的一个或多个关节以与检测到的外部力符合。4.根据任一前述权利要求所述的控制系统,其被配置成响应于从所述用户输入接收到所述命令:确定是否存在大于可从所述第二电源获得的阈值电池容量;以及仅在确定存在大于可从所述第二电源获得的阈值电池容量时,将对所述手术机器人臂的控制从所述待机模式转变到所述校准模式。5.根据权利要求4所述的控制系统,其被配置成在确定存在小于可从所述第二电源获得的阈值电池容量时,将所述手术机器人臂保持在所述待机模式。6.根据任一前述权利要求所述的控制系统,其被配置成响应于从所述用户输入接收到所述命令:确定所述手术器械是否位于患者的身体中;以及仅在确定所述手术器械不位于所述患者的身体中时,将对所述手术机器人臂的控制从所述待机模式转变到所述校准模式。7.根据权利要求6所述的控制系统,其被配置成在确定所述手术器械位于所述患者的身体中时,将所述手术机器人臂保持在所述待机模式。8.根据任一前述权利要求所述的控制系统,其中所述手术机器人臂安装在支撑结构上,并且位于所述手术机器人臂上或邻近所述手术机器人臂的用户输入位于所述支撑结构上。9.根据任一前述权利要求所述的控制系统,其被配置成:
当所述手术机器人臂以所述全功率模式操作时,在所述控制系统约束所述手术机器人臂的运动的另一模式中控制所述手术机器人臂,以便维持所述手术器械与所存储的支点之间相交;检测所述第一电源的电源故障;响应于检测到所述电源故障,启用所述降低功率模式,并且将对所述手术机器人臂的控制从所述另一模式转变到所述待机模式;在处于所述降低功率模式时,从位于所述手术机器人臂上或邻近所述手术机器人臂的用户输入接收命令;以及响应于接收到所述命令,将对所述手术机器人臂的控制从所述待机模式转变到所述校准模式。10.根据权利要求9所述的控制系统,其中所述另一模式是器械调节模式,在所述器械调节模式中,所述控制系统被配置成控制所述手术机器人臂以与检测到的施加到所述手术机器人臂的外部力符合。11.根据权利要求9所述的控制系统,其中所述另一模式是器械更换模式,在所述器械更换模式中,所述控制系统被配置成控制所述手术机器人臂以与检测到的沿着所述手术器械的纵向轴线定位的外部力的分量符合。12.根据权利要求9所述的控制系统,其中所述另一模式是锁定模式,在所述锁定模式中,所述控制系统被配置成将所述手术机器人臂的关节抵抗重力保持就位。13.根据权利要求9至12中任一项所述的控制系统,其中所存储的支点是当所述手术器械在患者的身体中的端口内在所述手术机器人臂的构造改变时所述手术器械枢转所围绕的点。14.根据任一前述权利要求所述的控制系统,其中所述第一电源是干线电源。15.根据权利要求14所述的控制系统,其中所述干线电源经由所述远程外科医生控制台提供到所述手术机器人臂。16.根据任一前述权利要求所述的控制系统,其中所述第二电源包括电池。17.根据权利要求16所述的控制系统,其中所述电池是可再充电的。18.根据权利要求16所述的控制系统,其中所述第二电源包括另一电池,其中所述另一电池是不可再充电的。19.根据任一前述权利要求所述的控制系统,其中所述控制系统包括机器人臂控制器,所述机器人臂控制器被配置成检测电源故障,检测电源故障后的电力恢复,以及启用和禁用所述全功率模式和所述降低功率模式。
技术总结
一种用于手术机器人系统的控制系统,所述手术机器人系统包括:具有外科医生输入装置的远程外科医生控制台;和手术机器人臂,所述手术机器人臂包括从基座延伸到用于附接到手术器械的末端的一系列关节,所述手术机器人臂可以全功率模式和降低功率模式操作,在所述全功率模式中,所述手术机器人臂的关节由第一电源供电,在所述降低功率模式中,所述手术机器人臂的关节由第二电源供电,所述控制系统被配置成:当所述手术机器人臂以所述全功率模式操作时,通过将所述外科医生输入装置的移动转换成用于移动所述手术机器人臂的关节的控制信号而在手术模式中控制所述手术机器人臂;检测所述第一电源的电源故障;响应于检测到所述电源故障,启用所述降低功率模式,并且将对所述手术机器人臂的控制从所述手术模式转变到待机模式;当处于所述降低功率模式时,从位于所述手术机器人臂上或邻近所述手术机器人臂或位于所述外科医生控制台上的用户输入接收命令;以及响应于接收到所述命令,将对所述手术机器人臂的控制从所述待机模式转变到校准模式。人臂的控制从所述待机模式转变到校准模式。人臂的控制从所述待机模式转变到校准模式。
技术研发人员:G
受保护的技术使用者:CMR外科有限公司
技术研发日:2021.04.21
技术公布日:2022/12/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。