1.本发明涉及如权利要求1的前序部分所述的车轴、拖车以及用于补偿第一车轮端部的减速的方法。
背景技术:
2.在现有技术中已知其中两个车轮端部经由车轴差速器和发电机连接至回收装置的车轴。当回收来自车轮端部的旋转能量时,相同大小的减速或相同大小的减速转矩因此被施加至两个车轮端部。通过这种系统,例如在制动过程中可以临时地或连续地回收能量。由于向两个车轮端部施加了相同大小的减速,因此确保了这种车辆的行驶动力学在直线行驶时保持稳定。然而,这种连接在两侧的回收装置成本高昂,并且需要大量的结构空间。此外,这种解决方案具有高的重量。如果回收装置仅连接至一侧的一个车轮端部,则只能使用低功率发电机,否则可能会出现行驶动力学问题。因此,只能回收少量的能量。
技术实现要素:
3.因此,本发明的目的是提供一种能够通过回收装置有效地回收能量,并且能够以低生产成本和低重量实现的车轴、拖车或多用途车辆拖车以及用于补偿第一车轮端部由于能量回收引起的减速的方法。
4.通过具有权利要求1的特征的车轴、具有权利要求13的特征的拖车或多用途车辆拖车以及具有权利要求15的特征的方法来克服上述问题。
5.根据本发明的第一方面,提供了一种特别是用于多用途车辆的车轴,其中,所述车轴包括第一车轮端部和第二车轮端部,所述第一车轮端部和所述第二车轮端部彼此相对布置或能够彼此相对布置并且能够在所述车轴上旋转;回收装置,其连接至或能够连接至所述第一车轮端部并且被设计为回收所述第一车轮端部的旋转能量;制动装置,其被设计为使所述第二车轮端部减速;以及控制单元,其被设计为确定关于所述第一车轮端部的由所述回收引起的减速和/或所述第二车轮端部的减速的信息,并且控制所述制动装置和/或所述回收装置,使得所述第一车轮端部的减速和所述第二车轮端部的减速彼此匹配。车轴可以是一件式或多件式车轴。车轴可以连续地或部分地沿着旋转轴延伸,该旋转轴对应于设置在车轴上的车轮的旋转轴。此外,第一车轮端部和第二车轮端部可以特别地在不可旋转地布置在多用途车辆或拖车上的车轴上围绕该旋转轴旋转。在多件式车轴的情况下(即,在车轴由多个单独的单个部件组成的情况下),车轴可以在运行状态下例如在多用途车辆或拖车上形成。车轮端部可以是能够设置在车轴上的单独的部件。车轮端部可以形成车轴的轴向端部。车轮端部可以是分别可以布置轮辋的轮毂或元件。在其上设置有根据本发明的车轴的车辆的运行期间,即在行驶时,第一车轮端部和第二车轮端部可以围绕相同的旋转轴一起旋转。回收装置可以是再生制动器,其可以被设计成将动能转换成可储存的电能和/或转换成不同形式的能量。这里,回收装置可以以例如电动制动器的方式以无磨损的方式运行。回收装置可以包括在回收过程中可以作为发电机运行的电机。电机可以是同步马达
或异步马达。在回收过程中,可以通过作为发电机运行的电机产生制动效果。可以以减速的形式将该制动效果应用于与回收装置连接的车轮端部。回收装置优选地仅连接至设置在车轴上的两个车轮端部中的一个车轮端部。由于可以省去差速器以及回收装置与车轴的另一个车轮端部之间的连接,因此可以节省结构空间。与纯动力制动相比,从动能回收的电能在回收装置中不转换为热量,而是存储在车辆中设置的电池中,或者直接供给至消耗单元。制动装置可以是被设计为使一个车轮端部独立于设置在同一车轴上的另一车轮端部制动或减速的任何装置。只要制动装置可以使第二车轮端部单独地(即,独立于第一车轮端部)制动,制动装置也可以布置在第一车轮端部上。制动装置例如可以是驻车制动器的一部分。在本情况中,减速或制动可以被理解为引起各个车轮端部的转速降低的负加速度。控制单元可以包括比较单元,比较单元可以接收信息(例如,测量数据)并且可以输出与之相适应的激活命令。控制单元可以基于所获得的信息利用激活命令来控制其他系统。为此,控制单元可以具有与各个系统的(有线或无线)数据链路。例如,已经安装在车辆中的控制单元可以用作控制单元。控制单元可以被设计为使得其可以控制回收装置和/或制动装置,使得由制动装置或回收装置分别施加至第一车轮端部或第二车轮端部的减速彼此匹配。彼此匹配可以是指由施加的减速引起的转矩对应于预先指定或设置的值和/或方向。当第一车轮端部比第二车轮端部旋转得更快时或者正好相反时会出现净转矩。因此,旋转更快的车轮端部可以比旋转更慢的车轮端部覆盖更大的距离,例如当安装有所述车轴的车辆转弯时就是这种情况。控制单元可以控制制动装置和/或回收装置,使得车轮端部中的一者比另一者旋转得更快,以便使车轴改变其行驶方向(即,其可以被转向)。通过这种控制系统可以辅助或促进设置有车轴的车辆转弯的能力。此外,通过这种控制系统可以促进车辆操纵。因此,第一车轮端部和/或第二车轮端部的选择性减速可以使转弯或操纵更容易。替代地或附加地,控制单元可以控制回收装置和/或制动装置,使得第一车轮端部和第二车轮端部的减速基本上具有相同大小。因此,第一车轮端部和第二车轮端部的减速可以相互比较,并且可以确定两个减速之间的差是否低于预先确定的值。因此,尽管回收装置仅连接至一个车轮端部,也可以确保安装有所述车轴的车辆的行驶动力学在减速过程中保持稳定。因此,由于第一车轮端部的旋转能量的回收引起的第一车轮端部一侧的减速可以通过制动装置在第二车轮端部处的选择性接合基本上得到补偿,使得在直线行驶时车辆的行驶动力学不会受到不良影响。因此,第一车轮端部和第二车轮端部可以彼此独立地减速。此外,利用本发明,可以获得能量回收与生产成本和所使用的结构空间之间的最佳平衡,从而能够提高安装有所述车轴的车辆的整体效率。控制单元可以检测车轴和/或车辆的状态值,并且基于它们控制回收装置和/或制动装置,使得检测到的值(即,信息)位于期望范围内(即,在例如预设范围内)。在本发明的实施方案中,例如,设定净转矩为尽可能低,从而在直线行驶时确保最佳行驶稳定性。
6.优选地,所述信息可以包括第一车轮端部和/或所述第二车轮端部的减速或减速值和/或由于所述减速而产生的转矩。所产生的转矩可以是由于车轮端部中的至少一者的减速而在车轴中产生的合成转矩。信息可以是可以由控制单元的至少一个检测装置提供的数据。合成转矩可以由第一车轮端部的减速和第二车轮端部的减速引起。所述信息可以通过诸如转速传感器和/或加速度传感器等例如专门为此目的设置的传感器获得,或者可以通过车辆中设置的系统获得。控制单元可以例如从esp系统和/或abs系统获得信息。
7.控制单元可以被设计为基于所回收的旋转能量来确定关于所述第一车轮端部的减速或减速值的信息。此外,可以根据所回收的旋转能量来确定速度。使用已知速度和时间一起,可以确定加速度(即,减速)。因此,控制单元可以被设计为基于所回收的旋转能量来确定第一车轮端部的减速。用于测量回收能量的传感器可以布置在车辆中的几乎任何位置,原因是其不需要物理地直接布置在回收装置上。因此可以增加结构的自由度。此外,传感器可以设置在受保护的位置处,其结果是可以确保传感器的可靠性并且延长其寿命。
8.所述控制单元可以具有被设计为确定所述信息的至少一个传感器。传感器例如可以是被设计为测量车轮端部或两个车轮端部的转速的转速传感器。通过将车轮端部的转速乘以安装在各个车轮端部的车轮的运行表面的周长可以确定速度。根据速度(即,根据速度变化),控制单元可以与时间一起确定加速度(例如,减速)。因此,借助于可以测量例如至少一个车轮端部的转速的传感器,控制单元可以确定第一车轮端部和/或第二车轮端部的减速。此外,可以设置分别与第一车轮端部和第二车轮端部相关联的两个传感器。替代地或附加地,还可以设置中央传感器,该中央传感器可以是加速度传感器,并且可以被设计为直接测量减速和/或合成转矩。
9.优选地,由于所述回收装置对所述第一车轮端部的减速而引起的第一减速可以作用在所述车轴的布置有或可以布置有所述第一车轮端部的一端处,并且由于通过所述制动装置对所述第二车轮端部的减速而引起的第二减速可以作用在所述车轴的布置有或可以布置有所述第二车轮端部的另一端处,并且所述控制单元还可以被设计为控制制动装置和/或回收装置,使得所述第一减速和所述第二减速得到补偿或均衡或平衡。减速可以是可以作用于各个车轮端部的减速转矩。车轴的端部可以是车轴的轴向外端。当第一减速和第二减速基本上具有相同大小时,它们得到了适当地补偿。在本情况中,如果第二减速和第一减速对应于5%的偏差,则基本上可以表示它们具有相同大小。因此,可以确保通过制动装置或回收装置的选择性激活可以补偿(即,均衡)施加在一侧的减速或由此引起的转矩。
10.所述至少一个传感器可以优选地被设计为确定所述车轴的横摆力矩和/或所述第一车轮端部和/或第二车轮端部的转速。这里,传感器可以是已经安装在汽车中并且用于其他目的(例如,用于esp系统)的传感器。该传感器可以例如特别是使用基于硅的微机械横摆角速度传感器测量横摆角速度。传感器优选地布置在其上设置有所述车轴的车辆的重心处或重心中。使用车辆上已经安装的abs传感器可以测量转速。因此,可以借助于磁轮来确定各车轮端部的转速。替代地,可以为上述应用中的各者设置单独和独立的传感器。由传感器确定的测量值可以提供给控制单元。
11.制动装置可以优选地是机械制动器,特别是盘式制动器或鼓式制动器。因此,可以使用通常安装在车辆中,特别是多用途车辆中的制动装置。必须简单地确保制动装置可以由控制单元单独启动。特别地,可以启动制动装置,使得第一车轮端部由于旋转能量的回收而引起的减速和第二车轮端部的减速可以彼此匹配。因此,制动装置可以被设计为使得可以通过所述制动装置使第二车轮端部独立于第一车轮端部单独地减速。
12.第一车轮端部优选地可以直接连接至所述回收装置,特别地,没有差速器位于它们之间。回收装置可以具有齿轮箱和电机。因此,电机可以经由齿轮箱连接至第一车轮端部。特别地,回收装置可以使用半轴连接至第一车轮端部。回收装置仅连接至一个车轮端部的事实(即,回收装置连接至一侧)具有这样的优点,即,可以省去差速器,其结果是车轴周
围需要更少的结构空间。因此,车轴系统更加紧凑,并且不易损坏。车轴的重量进一步减轻。
13.根据本发明的第二方面,一种拖车或多用途车辆拖车包括上述车轴中的至少一者。所述拖车可以包括例如上述车轴中的两个,其中,所述两个车轴布置为使得第一车轴在所述拖车的(在行驶方向上的)左手侧具有所述第一车轮端部,并且所述第二车轴在所述拖车的(在行驶方向上的)右手侧具有所述第一车轮端部。因此可以简化控制系统,并且控制单元可以控制回收装置,使得第一车轴处的减速可以通过第二车轴处的减速在所有轴上得到均衡,并且反之亦然。因此,由于在第一车轴处的回收而引起的车轮端部的减速可以通过由于在第二车轴处的回收而引起的车轮端部的减速得到均衡。因此需要制动装置的更少的制动接合,其结果是可以提高拖车使用时的效率。
14.根据本发明的第三方面,提供了一种用于补偿特别是用于诸如多用途车辆拖车等多用途车辆的车轴的第一车轮端部由于设置了回收而引起的减速的方法,其中,所述方法具有以下步骤:回收所述第一车轮端部的旋转能量,确定关于至少所述第一车轮端部的减速的信息,以及通过基于所确定的所述第一车轮端部的减速使所述车轴的第二车轮端部减速来补偿所述第一车轮端部的减速。使用上述方法可以补偿由于向车轮端部施加回收转矩而出现的单侧减速,使得确保稳定的行驶动力学。上述与装置相关的优点和实施方案对该方法也同样使用,并且反之亦然。
附图说明
15.进一步的优点和特性将从通过参照附图对根据本发明的主题的优选实施方案的以下说明中变得明显。这里,各个实施方案的各个特征可以在本发明的范围内彼此组合。在附图中:
16.图1示出了现有技术的车轴;
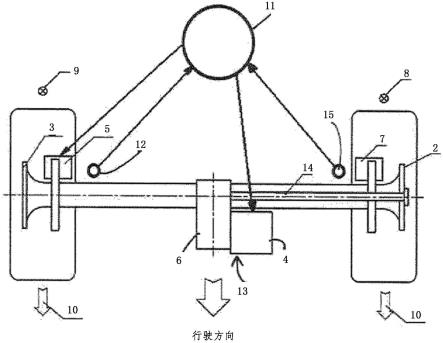
17.图2示出了根据本发明实施方案的车轴;并且
18.图3示出了根据本发明实施方案的车轴。
具体实施方式
19.图1示意性示出了现有技术的车轴100。车轴100具有第一车轮端部102和第二车轮端部103。用于使各个车轮端部102、103减速的制动装置104、107分别设置在各车轮端部102、103处。此外,车轴100还具有在经由差速器108通过半轴(axle shaft)106分别连接至第一车轮端部102和第二车轮端部103的回收装置120。回收装置120具有齿轮箱105和电机102。此外,图1中用箭头示出了行驶方向。箭头110示出了各个车轮端部102、103在行驶方向上的运动。在回收过程中,向两个车轮端部102、103施加相同的减速或相同的减速转矩109。由于差速器108和两个半轴106的存在,图1所示的车轴需要大量的结构空间并且价格昂贵。
20.图2示意性示出了根据本发明实施方案的车轴1。车轴1包括第一车轮端部2和第二车轮端部3。第一车轮端2和第二轮端3各自形成车轴1的轴向端部。第一车轮端部2和第二车轮端部3各自是轮毂的一部分,轮毂与车轴1一起围绕车轴1的旋转轴旋转。在车轮端部2、3的各者上可以安装轮辋。此外,车轴1具有回收装置13,回收装置13具有齿轮箱6和电机4。回收装置13通过半轴14直接连接至第一车轮端部2。更确切地说,回收装置13仅(即,唯一地)连接至第一车轮端部2。此外,车轴1具有制动装置5、7,其分别与车轮端部2、3中的一者相关
联并且可以使各个车轮端部2、3减速。制动装置5可以单独地使第二车轮端部3减速。换言之,制动装置5可以在第二车轮端部3处产生减速9。另一方面,回收装置13可以在第一车轮端部2处产生减速8。图2未图示的控制单元控制回收装置13和/或制动装置5,使得第一车轮端部2由于回收引起的减速和第二车轮端部3由于通过制动装置5的减速引起的减速基本上具有相同大小,从而沿行驶方向的运动10基本上具有相同大小。因此,沿直线行驶时能够实现车轴1的稳定的行驶动力学。换言之,例如,围绕车轴1的中心点旋转的合成转矩16基本上为零。在由制动装置引起的减速9和由回收装置引起的减速8不具有相同大小的情况下,合成转矩16也不是零,而是对应于大于零的量。因此,其上设置有车轴1的车辆1的行驶动力学会变得不稳定。在另一实施方案(未图示)中,不稳定的行驶动力学可以用于改善安装有车轴1的车辆的弯道行驶和/或操纵。这里,以选择性的方式控制控制单元11(参照图3),使得第一车轮端部2和第二车轮端部3的运动10不具有相同大小。因此,合成转矩16不为零。因此,可以迫使车轴1采取弯曲路径。
21.图3示出了车轴1以及信息流的示意图。因此,图3示出了从传感器12和传感器15获得信息或测量值的控制单元11。控制装置11向制动装置5和回收装置13发出控制命令。在本实施方案中,第一传感器15与第一车轮端部2相关联,并且第二传感器12与第二车轮端部3相关联。例如,第一传感器15确定由回收装置13回收的能量。相比之下,第二传感器12确定第二车轮端部3的转速。在另一实施方案(未图示)中,第一传感器15同样确定第一车轮端部2的转速。在另一实施方案(未图示)中,仅设置一个传感器,该传感器向控制装置11提供信息,特别地,提供关于车轴1或设置有该车轴的车辆的横摆力矩的信息。控制单元11是比较器单元,其将其接收的信息分配给指定的激活命令并且输出它们。特别地,控制单元11向制动装置5和回收装置13输出控制命令。因此,控制装置11可以通过制动装置5的选择性激活来确保第二车轮端部3的由于减速引起的减速9与第一车轮端部2的由于旋转能量的回收引起的减速8基本上具有相同大小。因此能够确保车轮端部2和3两者的运动10基本上具有相同大小,因此在直线行驶时车轴1的行驶动力学是稳定的。此外,通过控制单元11对回收装置13和/或制动装置5的选择性控制可以使第一车轮端部2和第二车轮端部3在行驶方向上的运动10不具有相同大小,其结果是,控制单元11的控制系统可以使车轴沿着弯曲路径运动。换言之,控制系统可以辅助转向。
22.附图标记列表
23.1车轴
24.2第一车轮端部
25.3第二车轮端部
26.4电机
27.5,7制动装置
28.6齿轮箱
29.8通过回收装置减速
30.9通过制动装置减速
31.10沿行驶方向的运动
32.11控制单元
33.12第二传感器
34.13回收装置
35.14半轴
36.15第一传感器
37.16合成转矩。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。