调节装置和对应的物体处理装置、光刻设备和调节方法
1.相关申请的交叉引用
2.本技术要求于2020年5月27日递交的欧洲申请20176855.3的优先权,并且所述欧洲申请的全部内容通过引用并入本文中
技术领域
3.本发明涉及对物体的调节。具体地,本发明涉及调节装置,所述调节装置可以例如是物体处理装置、平台设备或光刻设备的部件或部分。本发明也涉及一种用于调节物体的方法。
背景技术:
4.光刻设备是被构造成将所需的图案施加至衬底上的机器。光刻设备可以用于(例如)集成电路(ic)的制造中。例如,光刻设备可以将图案形成装置(例如,掩模)处的图案投影到设置于衬底上的辐射敏感材料(抗蚀剂)层上。
5.为了将图案投影于衬底上,光刻设备可以使用电磁辐射。这种辐射的波长确定可以形成在衬底上的特征的最小大小。相比于使用例如具有193nm的波长的辐射的光刻设备,使用具有在4nm至20nm的范围内的波长(例如6.7nm或13.5nm)的极紫外(euv)辐射的光刻设备可以用于在衬底上形成较小特征。
6.在将所述图案投影于衬底上之前,所述衬底例如通过被冷却或加热至预定温度来调节。所述衬底也可以例如在调节期间被对准。
7.也已知将衬底以静电方式夹持于大数目(例如500或更多)个突节上以用于在受冷却或受加热的夹具与所述衬底之间的热传递。
技术实现要素:
8.本发明的目标是提供用于调节物体的经改善的装置和方法,或至少提供针对现有系统的替代物。
9.这种目标通过用于调节在调节体积中的物体的调节装置来实现,所述调节装置包括:至少一个支撑销,所述至少一个支撑销适于支撑所述物体;以及第一板和第二板,所述第一板和第二板形成所述调节体积的外边界。所述调节装置还包括致动器单元,所述致动器单元适于使所述第一板和所述第二板中的至少一个在以下位置之间移动:物体接收位置,在所述物体接收位置中所述第一板和所述第二板彼此分离开一接收距离且所述物体能够被布置到所述调节体积中,和物体调节位置,在所述物体调节位置中所述第一板和所述第二板彼此分离开小于所述接收距离的调节距离,其中密封件在所述物体调节位置中形成在所述第一板与所述第二板之间,其中所述密封件形成所述调节体积的外边界。所述调节装置还包括用于供应调节流体至所述调节体积中的至少一个流体出口。
10.在根据本发明的调节装置中,所述物体的调节借助于所述调节流体以及所述第一板和所述第二板来实现。在所述物体调节位置中,所述第一板和所述第二板被布置成相对
地接近于物体。所述至少一个支撑销主要被设置用于支撑。相比于已知系统,可以减小所述调节装置与所述物体之间的接触点的数目。本发明人已发现这是有利的,这是因为其减少所述物体的潜在损害。此外,减少接触点的数目也减少物体的未知变量(诸如材料、电学性质、和摩擦系数)的影响。另外,因为所述至少一个支撑销主要被设置用于支撑,则不需要静电夹持。本发明人已发现静电夹持可能导致由于物体静电黏着至静电夹具而引起的损害,利用本发明可以避免所述损害。
11.在实施例中,密封件是机械密封件和/或迷宫式密封件,其在第一板和/或第二板被布置于物体调节位置中时由所述第一板和/或所述第二板形成。有利地,不需要额外的部件来形成密封件,这减少磨损和维护。所述密封件可以例如为迷宫式密封件。
12.在实施例中,所述调节装置还包括控制单元,其中所述控制单元包括输入端子,所述输入端子适于接收表示所述物体的翘曲和/或所述物体相对于所述第一板和/或第二板的定向的距离信息。控制单元还被配置成基于所述距离信息来确定所需的调节距离并且基于所需的调节距离来控制所述致动器单元以将所述第一板和/或第二板布置于所述物体调节位置中。有利地,考虑物体的翘曲和/或定向且第一板和第二板可以在任何情形中被布置成相对地接近于物体,这改善热能的传递。
13.在实施例中,所述调节装置还包括翘曲测量单元,所述翘曲测量单元适于确定所述距离信息并且适于向所述控制单元的所述输入端子发送所述距离信息。有利地,可以考虑相应的物体的实际翘曲。
14.在实施例中,所述调节装置还包括控制单元,所述控制单元被配置成控制所述调节流体的供应,使得所述调节体积内的压力在操作使用期间能够达到介于400pa至2200pa之间,优选地600pa至2000pa之间,更优选地700pa至1200pa之间,更优选地900pa至1000pa之间。本发明人已发现这些压力有利于热能的传递,以及有利于对诸如密封件之类的部件的要求。
15.在实施例中,在物体接收位置中,接收开口设置于第一板与第二板之间以用于在第一板与第二板之间布置所述物体,其中所述接收开口介于5mm至25mm之间、优选地10mm至20mm之间、更优选地14mm至16mm之间。本发明人已发现这有利于特别是当物体是光刻应用中的衬底或晶片时(例如当物体翘曲时)接收物体。
16.在实施例中,调节距离介于0.8mm至2.5mm之间、优选地1mm至2mm之间或1mm至1.3mm之间。本发明人已发现这有利于特别是当物体是光刻应用中的衬底或晶片时接收物体。这些实施例也考虑物体的可能的翘曲,以及调节装置的物体和部件的制造和定位中的公差。
17.在实施例中,第一板和/或第二板是调节板。已发现这对于调节所述物体是有利的。例如,第一板和/或第二板可以是激冷板。
18.在实施例中,所述调节装置还包括适于调节第一板和/或第二板的液体调节系统。有利地,物体释放热能至第一板和/或第二板,热能继而可以借助于液体调节系统而被释放。
19.在实施例中,所述调节装置还包括适于在物体被布置于所述调节体积中之前降低物体的温度的预冷却模块。有利地,可以减少需要所述物体保持在所述调节体积中的时间,和/或可能更准确地达到物体可以被调节至的温度。
20.在实施例中,所述调节装置还包括适于在物体被布置于所述调节体积中之前增加物体的温度的预加热模块。有利地,可以减少需要所述物体保持在所述调节体积中的时间,和/或可能更准确地达到物体可以被调节至的温度。
21.在实施例中,所述至少一个支撑销包括一个、两个、三个、四个、五个、或六个支撑销。有利地,物体与调节装置之间的接触点的数目相对较小。
22.在实施例中,至少一个流体出口被设置于第一板和/或第二板中。有利地,提供相对简单的构造。
23.在实施例中,所述调节流体包括h2、n2或氩气。这些流体已被认为有利于准确地调节所述物体。
24.在实施例中,调节装置被布置于具有低于大气压的压力的真空环境中。这已被认为特别是在物体是光刻过程(其中euv辐射被发射至物体上)中的晶片或衬底时是有利的。
25.在实施例中,物体是掩模版、衬底、或晶片。本发明已被认为有利于这些应用。
26.在实施例中,所述调节装置还包括适于与所述物体并行或串行地调节第二物体的第二调节体积,其中第二调节体积以类似于所述调节体积的方式被实施。有利地,可以增加吞吐量。
27.本发明还涉及一种物体处理装置,包括根据本发明的调节装置和适于在所述物体正在所述调节体积中被调节时确定和/或控制所述物体的位置的物体预对准模块。有利地,预对准模块和调节装置同时起作用,从而减少用以处理所述物体所需的总时间且由此增加吞吐量。
28.在根据本发明的物体处理装置的实施例中,所述物体预对准模块包括多个照射器以及各自对应的用于确定物体的位置的相机,其中所述照射器各自适于发射测量束且每个相机适于接收由对应的照射器所发射的测量束,其中第一板和/或第二板包括至少一个束透明区,测量束可以行进穿过所述至少一个束透明区。有利地,可以确定物体的位置。在实施例中,所述预对准模块包括四个照射器和四个相机。
29.本发明还涉及一种用于接收物体的平台设备,所述平台设备包括载物台、根据本发明的物体处理装置、以及适于接收来自所述处理装置的所述物体并且将所述物体布置于所述载物台上方的物体夹持器。有利地,在物体被布置于载物台上方之前使用根据本发明的所述调节装置来调节所述物体。
30.本发明还涉及一种包括根据本发明的用于接收包括衬底的物体的平台设备的光刻设备,其中所述光刻设备适于将来自图案形成装置的图案投影至所述衬底上。有利地,在图案被投影至衬底上之前使用根据本发明的调节装置来调节所述物体。
31.本发明还涉及一种用于在包括调节体积的调节装置中调节物体的方法。所述方法可以使用根据本发明的调节装置、物体处理装置、平台设备、或光刻设备来执行,但不限于此。然而,本文中关于本发明的调节装置、物体处理装置、平台设备、或光刻设备而解释的特征中的任一特征可以类似地被应用于本发明的方法,并且反之亦然。
32.所述方法包括在形成所述调节体积的外边界的第一板和第二板处于物体接收位置(其中第一板和第二板彼此分离开一接收距离)中时将物体布置于至少一个支撑销上的步骤。所述方法还包括将第一板和/或第二板布置于物体调节位置(其中第一板和第二板彼此分离开一调节距离,所述调节距离小于接收距离)中的步骤,其中所述密封件在物体调节
位置中被形成在第一板与第二板之间,其中密封件形成所述调节体积的外边界。所述方法还包括将调节流体经过至少一个流体出口供应至调节体积中的步骤,和从所述调节装置移除物体的步骤。
33.在本发明的方法中,相比于已知系统,可以减小调节装置与物体之间的接触点的数目。本发明人已发现这是有利的,这是因为其减少物体的潜在损害。此外,减少接触点的数目也减少物体的未知变量(诸如材料、电学性质、和摩擦系数)的影响。另外,因为至少一个支撑销主要被提供用于支撑,则不需要静电夹持。本发明人已发现静电夹持可能导致使物体静电黏着至静电夹具,利用本发明则可以避免所述静电黏着。
34.在根据本发明的方法的实施例中,在将所述物体插入于调节装置中之后4至15秒,优选地在5至13秒之后(例如在5至7秒之后(例如在6秒之后)或例如在11至13秒(例如12秒)之后)从调节装置移除物体。有利地,所述物体在调节装置中花费相对非常少时间,从而允许高吞吐量。
35.在根据本发明的方法的实施例中,当物体的温度在预定温度的正负3mk内、优选地在正负2mk内(例如在正负1.5mk内)时从调节装置移除物体。有利地,本发明允许非常准确地调节所述物体。
36.在实施例中,本发明涉及一种其中利用根据本发明的调节装置的方法。
37.在实施例中,预定温度是18℃至25℃,例如20℃、21℃或22℃。
附图说明
38.现在将参考随附附图仅作为示例来描述本发明的实施例,在所述附图中:
39.图1描绘包括光刻设备和辐射源的光刻系统;
40.图2a示意性地描绘根据实施例的调节装置的侧视图,其中第一板和第二板被布置于物体接收位置中;
41.图2b示意性地描绘图2a中示出的调节装置的侧视图,其中第一板和第二板被布置于物体调节位置中;
42.图3图示根据本发明的物体处理装置的预对准模块;
43.图4a示意性地描绘根据实施例的调节装置的侧视图,其中第一板和第二板被布置于物体接收位置中;
44.图4b示意性地描绘图4a中示出的调节装置的侧视图,
45.图5a示意性地描绘根据实施例的调节装置的侧视图,其中第一板和第二板被布置于物体接收位置中;
46.图5b示意性地描绘图5a中示出的调节装置的侧视图,
47.图6a至图6d示意性地描绘根据实施例的第一板和第二板的俯视图。
48.图7图示根据本发明的平台设备的物体处理装置;
49.图8图示根据本发明的调节装置的另一实施例。
具体实施方式
50.图1示出包括辐射源so和光刻设备la的光刻系统。辐射源so被配置成产生euv辐射束b和将euv辐射束b供应至光刻设备la。光刻设备la包括照射系统il、被配置成支撑图案形
成装置ma(例如,掩模)的支撑结构mt、投影系统ps、以及被配置成支撑衬底w的衬底台wt。
51.照射系统il被配置成在euv辐射束b入射到图案形成装置ma上之前调节euv辐射束b。另外,照射系统il可以包括琢面场反射镜装置10和琢面光瞳反射镜装置11。琢面场反射镜装置10和琢面光瞳反射镜装置11共同提供具有所需的横截面形状和所需的强度分布的euv辐射束b。作为琢面场反射镜装置10和琢面光瞳反射镜装置11的补充或替代,照射系统il可以包括其它反射镜或装置。
52.在如此调节之后,euv辐射束b与图案形成装置ma相互作用。作为这种相互作用的结果,产生被图案化的euv辐射束b'。投影系统ps被配置成将被图案化的euv辐射束b'投影至衬底w上。出于该目的,投影系统ps可以包括被配置成将被图案化的euv辐射束b'投影至由衬底台wt保持的衬底w上的多个反射镜13、14。投影系统ps可以将减小因子应用于被图案化的euv辐射束b',因此形成具有小于图案形成装置ma上的对应特征的特征的图像。例如,可以应用减小因子4或8。虽然投影系统ps被图示是在图1中仅具有两个反射镜13、14,但投影系统ps可以包括不同数目个反射镜(例如,六个或八个反射镜)。
53.衬底w可以包括先前形成的图案。在这样的情况下,光刻设备la使由被图案化的euv辐射束b'形成的图像与先前形成在衬底w上的图案对准。
54.可以在辐射源so中、在照射系统il中和/或在投影系统ps中提供相对真空,即,处于充分地低于大气压力的压力下的少量气体(例如氢气)。
55.辐射源so可以是激光产生等离子体(lpp)源、放电产生等离子体(dpp)源、自由电子激光(fel)或能够产生euv辐射的任何其它辐射源。
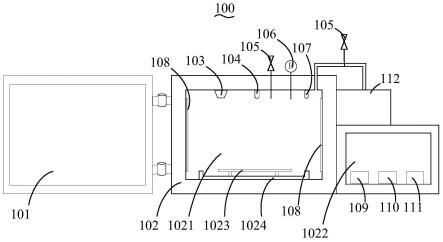
56.为了将所述图案准确地投影于所述衬底w上,所述衬底w的位置和温度必须被准确地控制。图2a至图2b示出根据本发明的调节装置100。所述调节装置100可以用于调节调节体积112中的物体104。物体104可以例如是衬底、晶片、或包括衬底的物体。
57.所述调节装置100包括适于支撑所述物体104的至少一个支撑销103,以及形成所述调节体积112的外边界的第一板101和第二板102。所述调节装置还包括适于使第一板101和第二板102中的至少一个在物体接收位置与物体调节位置之间移动的致动器单元105。在图2a中示出所述物体接收位置,并且在图2b中示出所述物体调节位置。在所述物体接收位置中,第一板101和第二板102彼此分离开一接收距离106且物体104可以被布置至调节体积112中。在所述物体调节位置中,第一板101和第二板102彼此分离开小于所述接收距离106的调节距离116。此外,密封件113在所述物体调节位置中形成在第一板101与第二板102之间,其中密封件113形成所述调节体积112的外边界。所述调节装置100还包括用于供应调节流体至所述调节体积112中的至少一个流体出口109。
58.本发明还涉及一种用于在包括调节体积112的调节装置100中调节物体104的方法,其中可选地利用根据本发明的调节装置100。所述方法包括在形成所述调节体积112的外边界的第一板101和第二板102处于物体接收位置(其中所述第一板101和所述第二板102彼此分离开一接收距离106)中时将物体104布置于至少一个支撑销103上的步骤。所述方法还包括将所述第一板101和/或所述第二板102布置于物体调节位置(其中所述第一板101和所述第二板102彼此分离开小于所述接收距离106的调节距离116)中的步骤。密封件113在所述物体调节位置中形成在所述第一板101与所述第二板102之间,其中密封件113形成所述调节体积112的外边界。所述方法还包括经由至少一个流体出口109将调节流体供应至所
述调节体积112中的步骤。所述方法还包括从所述调节装置100移除所述物体104的步骤。
59.在根据本发明的所述调节装置100中,借助于所述调节流体以及第一板101和第二板102来实现对所述物体104的调节。在这样的情境中,调节可以是例如加热或冷却所述物体104至预定温度的预定范围内。第一板101和第二板102在所述物体调节位置中被布置成相对地接近于所述物体104,优选地不与所述物体104接触。所述调节流体可以例如辅助对热能的传递。所述至少一个支撑销103主要被设置用于支撑。相比于已知系统,可以减小所述调节装置100与所述物体104之间的接触点的数目。本发明人已发现这是有利的,这是因为其减少所述物体104的潜在损害。此外,减少接触点的数目也减少物体的未知变量(诸如材料、电学性质、和摩擦系数)的影响。另外,本发明可以在物体104的可能的平面外形状的方面是有利的。所述平面外形状可以例如在物体104翘曲或弯曲时发生。例如,光刻应用中的最新趋势(诸如在竖直方向上添加更多层在衬底上)可能引起物体104发生翘曲。
60.另外,因为所述至少一个支撑销103主要被设置用于支撑,因此不需要静电夹持。本发明人已发现静电夹持可能导致所述物体104静电黏着至静电夹具,这可能导致受损。利用本发明可以避免这种情况。
61.在实施例中,物体104在4至15秒之后(优选地在5至13秒之后,例如在5至7秒之后,例如在6秒之后,或例如在11至13秒(例如12秒)之后)从所述调节装置100移除。有利地,所述物体104在所述调节装置中花费相对少的时间,从而允许高吞吐量。
62.在根据本发明的方法的实施例中,当物体104的温度在预定温度正负3mk内、优选地在正负2mk内(例如在正负1.5mk内)时从调节装置100移除物体104。有利地,本发明允许非常准确地调节所述物体104。在实施例中,所述物体104可以在进入调节装置100中之前在预定温度的正负100mk内,例如在大致70mk或35mk。预定温度可以例如是18℃至25℃,例如20℃、21℃或22℃。
63.在实施例中,密封件113是在第一板101和/或第二板102被布置于物体调节位置中时由第一板101和/或第二板102形成的迷宫式密封件和/或机械密封件。因为密封件113是由第一板101和第二板102形成,则不需要额外的部件,这减少磨损。在所示出的示例中,第一板101包括第一板突起111且第二板102包括第二板突起110,所述突起在物体调节位置中交错(intermesh)。在物体接收位置中,不存在密封件,使得物体104可以在至少一个支撑销103上方在第一板突起111与第二板突起110之间移动至调节体积112中。在实施例中,密封件是无接触密封件。因而,在这种实施例中,在第一板101与第二板102之间不存在接触。避免接触会减少例如第一板突起111和第二板突起110的磨损,并且减少颗粒终止于物体104上的可能性。在实施例中,密封件113是例如由来自第一板101或第二板102的单个突起所形成的直线密封件。在实施例中,弹性体密封件可以设置于第一板101与第二板102之间。在实施例中,密封件113可以适于使得在操作使用中少量调节流体经由所述密封件流出调节体积112。
64.在实施例中,调节装置100包括控制单元120。控制单元120包括输入端子120.1,所述输入端子适于接收表示物体104的翘曲和/或物体104相对于第一板101和/或第二板102的定向的距离信息131。控制单元120被配置成基于距离信息131确定所需的调节距离并且基于所需的调节距离来控制致动器单元105以将第一板101和/或第二板102布置于物体调节位置中。例如,调节距离116可以与所需的调节距离对应或在所需的调节距离的预定范围
内。物体104相对于第一板101和/或第二板102的定向可以例如包括物体104和/或第一板101和/或第二板102是否倾斜。有利地,考虑物体104的实际翘曲和/或定向,第一板101和第二板102可以在物体调节位置中被布置成相对地接近于物体104。有利地,因为第一板101和第二板102可能被布置成较接近于物体10,则热能的传递较高效。另外,调节体积112在物体调节位置中较小,这意味着需要较少的调节液体。在实施例中,调节装置100可以包括翘曲测量单元,其将在下文参考图4进一步解释。在实施例中,距离信息131可以在其中使用调节装置的光刻系统的另一模块中被确定。在实施例中,距离信息131可以从过程控制系统提供,例如其中操作者可以输入所述物体104的特性,诸如距离信息131。
65.在所示出的示例中,致动器单元105包括用于移动第一板101的第一致动器105a和用于移动第二板的第二致动器105b,但其它布置是可能的。例如,可以是可能移动仅第一板101或仅第二板102。
66.在所示出的示例中,控制单元120包括用于发射致动器控制信号132的输出端子120.2。致动器控制信号132包括被发送至第一致动器105a的输入端子105a.1以用于控制所述第一致动器105a的第一致动器控制信号132a,和被发送至第二致动器105b的输入端子105b.1以用于控制所述第二致动器105b的第二致动器控制信号132b。
67.在实施例中,调节装置100包括控制单元120,所述控制单元120被配置成控制所述调节流体的供应,使得所述调节体积112内部的压力在操作使用期间能够达到400pa至2200pa,优选地600pa至2000pa,更优选地700pa至1200pa,更优选地900pa至1000pa之间。出于完整性原因,应注意,这些压力是绝对压力。因为压力较高,因此热能的传递被改善。然而,同时需要较多的调节流体且对于密封的要求是较严格的以减小泄漏。本发明人已发现上文提及的压力对于这些发散准则是令人满意的。
68.在所示出的示例中,用于控制调节流体的供应的控制单元120控制所述致动器单元105的相同控制单元120。在所示出的示例中,控制单元120包括用于发送流体控制信号134至压缩器107的输入端子107.1的输出端子120.4。如在图2a至在图2b中示意性地图示的,压缩器107适于使调节流体经由至少一个流体出口109流动通过导管108到达调节体积112中。应注意,虽然在所示出的示例中使用压缩器107,但也可能使用泵,这取决于所述调节流体。压缩器107可以在抽吸侧(图中未示出)上以流体方式连接至其中储存所述调节流体(例如,经加压)的流体储集器。可选地,流体储集器由调节装置包括。也可能的是,压缩器107以流体方式连接至调节流体网络,所述调节流体网络可以例如存在于其中使用调节装置100的前提下。
69.在所示出的实施例中,至少一个流体出口109包括五个流体出口109。然而,可以设置任何其它合适的数目个流体出口109。在所示出的示例中,至少一个流体出口109在操作使用期间被设置于第一板101中,第一板101布置于物体104上方。有利地,经过所述至少一个流体出口109提供的所述调节流体推迫所述物体104抵靠所述至少一个支撑销103。替代地或组合地,至少一个流体出口可以在操作使用期间被设置在第二板102中,其中第二板102布置于物体104下方。
70.在所示出的实施例中,调节流体包括h2。有利地,h2允许准确地调节所述物体104。例如,所述物体104可以被调整至预定温度的正负1k内(例如正负3mk内,例如正负1.5mk内)的温度。在其它实施例中,所述调节流体可以例如包括n2或氩气。
71.在实施例中,在物体接收位置中,接收开口126被设置于第一板101与第二板102之间以用于将所述物体104布置于第一板101与第二板102之间。在实施例中,所述接收开口126介于5mm至25mm、优选地10mm至20mm、更优选地14mm至16mm之间。已发现这允许即使当物体104翘曲时容易地将物体104布置至所述调节体积112中。对于其中存在第一板突起111和/或第二板突起110的实施例,将了解,当确定所述接收开口126时必须考虑它们的尺寸。在实施例中,所述接收距离106使得第一板101的底部与物体104的顶部之间的第一板至物体距离106a在物体接收位置中介于5mm至10mm之间(例如大致7mm)。在实施例中,所述接收距离106使得第二板102的顶部与物体104的底部之间的第二板至物体距离106b在物体接收位置中介于5mm至10mm之间(例如大致7mm)。
72.在实施例中,所述调节距离介于0.8mm至2.5mm、优选地1mm至2mm之间。已发现在例如在制造第一板101和第二板102、利用致动器单元105校准和定位第一板101和/或第二板102中考虑物体104的可能的翘曲和/或定向、以及公差和不准确度的同时,这种调节距离允许对于热能的高效传递。在实施例中,所述调节距离116使得第一板101的底部与物体104的顶部之间的第一板至物体距离116a在物体调节位置中介于0.2mm至1mm之间(例如大致0.4mm或0.6mm)。在实施例中,所述调节距离116使得第二板102的顶部与物体104的底部之间的第二板至物体距离116b在物体调节位置中介于0.2mm至1mm之间(例如大致0.4mm或0.6mm)。
73.在所示出的实施例中,至少一个支撑销103包括三个支撑销103,其中两个在图2a至图2b示出的视图中可见。在其它实施例中,至少一个支撑销103包括一个、两个、四个、五个或六个支撑销103。
74.图2a至图2b还示出可选地,控制单元120包括用于将销控制信号133发送至支撑销致动器114输入端子114.1的输出端子120.3。支撑销致动器114适于例如当物体104被布置在调节体积112中或从调节体积112移除时移动所述至少一个支撑销103。例如,物体104可以在至少一个支撑销103被回缩时由物体夹持器布置于第一板101与第二板102之间。控制单元120接着可以控制所述支撑销致动器114以向上移动所述至少一个支撑销103直到物体104由至少一个支撑销103支撑为止。物体夹持器接着可以回缩,从而导致图2a中示出的情形。在实施例中,所述至少一个支撑销103能够旋转。
75.在实施例中,第一板101和/或第二板102是调节板。例如,第一板101和/或第二板102可以被布置成具有低于或高于物体104的温度的温度,使得物体104由第一板101和/或第二板102调节。
76.图3图示了在实施例中,调节装置100还包括适于调节第一板101和/或第二板102的液体调节系统150。在所示出的示例中,液体调节系统150包括经过第一导管152和第二导管153泵送冷却液体的泵151。第一导管152中的冷却液体吸收来自第一板101的热能且第二导管153中的冷却液体吸收来自第二板102的热能。虽然图3中没有被示出,但将了解液冷系统150可以是闭合系统,其中冷却液体可以还被输送且热能可以例如通过改变冷却液体的压力和/或借助于热交换器而释放。图3还图示了可选地,控制单元120被配置成利用从输出端子120.5传输至输入端子151.1的调节控制信号135来控制所述泵151。
77.本发明还涉及一种包括根据本发明的调节装置100的物体处理装置500。物体处理装置500还可以包括适于在所述物体104在调节体积112中被调节时确定和/或控制位置所
述物体104的物体预对准模块。
78.在实施例中,物体预对准模块可以用类似于被披露于us7307695b2中的用于对准衬底的装置的方式被实施,和/或包括所述装置的一个或更多个特征。us7307695b2以引用的方式而被合并入本文中。
79.在如图3中示出的实施例中,预对准模块包括多个照射器171a、171b以及各自对应的用于确定物体104的位置的相机172a、172b。照射器171a、171b各自适于发射测量束173a、173b,并且每个相机172a、172b适于接收由对应照射器171a、172b所发射的测量束173a、173b。第一板101和/或第二板102包括至少一个束透明区174a、174b、175a、175b,测量束173a、173b可以行进穿过所述至少一个束透明区。
80.在所示出的示例中,预对准模块包括四个照射器171a、171b和四个相机172a、172b,其中的两个在图3中的视图中可见且另外两个被布置在可见照射器171a、171b和相机172a、172b的后方。然而,任何其它合适的数目个照射器171a、171b和相机172a、172b是可能的,例如三个、四个、五个或六个。
81.如图3中所图示,物体104的位置影响第一测量束173a和第二测量束173b,这是由于物体104可被布置于每个相应的测量束173a、173b的光学路径之中或之外。这可以通过接收由第一照射器171a所发射的第一测量束173a的第一相机172a和接收由第二照射器171b所发射的第二测量束173b的第二相机172b检测到。第一相机172a经由输出端子172a.1发射第一检测信号136a,并且第二相机172b经由输出端子172b.1发射第二检测信号136b。可选地,包括第一检测信号136a和第二检测信号136b的检测信号136被传输至控制单元120的输入端子120.6。控制单元120适于基于检测信号136确定物体104的位置。可选地,控制单元120还被配置成控制所述物体104的位置以预对准所述物体104。例如,所述支撑销致动器114可以是能够在水平方向上被移动或在水平方向上移动至少一个支撑销103。
82.翘曲物体可以由如图4a和图4b中示出的物体平坦化装置180而至少部分地被平坦化。物体104的平坦化可能导致所述调节距离116减小。这可能导致板101和10的较好的热性能。例如,达到某一温度范围内需要的持续时间在较低调节距离116的情况下是较短的。物体平坦化装置180包括在第一板101处的流体导管108a和流体出口109a(类似于如图2a、图2b中所描述的导管108和流体出口109)。物体平坦化装置180还包括在第二板102处的流体导管108b和流体出口109b。流体出口109a和109b被配置成朝向物体104释放流体以用于平坦化所述物体104。在实施例中,流体可以包括h2、n2、ar气体中的至少一种,且物体平坦化装置180可以包括h2或/和n2或/和ar气体轴承。物体不与物体流体出口109a、109b成实体接触。无接触有益于限制缺陷度。在物体接收位置(图4a)中,第一板至物体距离106a或/和第二板至物体距离106b介于2mm至20mm之间,可选地介于5mm至10mm之间,例如大致7mm。在物体调节位置(图4b)中,第一板至物体距离116a或/和第二板至物体距离116b介于20μm至800μm之间,可选地介于20μm至500μm之间,可选地介于20μm至300μm之间,可选地介于20μm至200μm之间,可选地介于50μm至200μm之间。物体104厚度可以介于525μm至1000μm之间,例如对于200mm直径晶片为725μm,对于300mm直径晶片为775μm,对于450mm直径晶片为925μm。
83.在从物体接收位置至物体调节位置的转变期间,h2供应和流动被接通。来自流体出口109a的质量流量在一个物体位置处大致类似于来自流体出口109b的质量流量。如果物体104较接近于板101或板102,则h2流不能离开且压力将积聚并且推送物体离开。这导致两
个板101、102之间的物体的自定心。h2流将导致物体104与两个板101、102之间无接触,也用于翘曲物体。因此,第一板至物体距离116a和第二板至物体距离116b介于50μm至200μm之间。这改善热调节,特别是这缩短了调节持续时间。(迷宫)密封件113将要经由非接触闭合机构来保持调节体积112内部的压力(约2000pa,与调节体积外部相比低得多)。无接触有益于限制缺陷度。
84.图5a、图5b示出其中调节装置100类似于图2a至图4b中描绘的调节装置但没有突起110、111因而没有密封件113的实施例。在这种实施例中,来自调节流体出口109或/和来自流体出口109a、109b的流体可以经由介于两个板101、102之间的空隙离开介于两个板101、102之间的空间。
85.图6a至图6d示意性地示出分别具有流体出口109a、109b的两个板101、102的不同配置的俯视图。第一板101包括流体排出口119a,从流体出口109a、109b释放的流体经由所述流体排出口119a离开调节体积112。第二板102包括流体排出口119b,从流体出口109a、109b释放的流体经由所述流体排出口119b离开调节体积112。流体排出口119a和119b可以在板101、102的俯视图中的部位中重合。图6a示出其中流体出口109a、109b和流体排出口119a、119b分别沿板101、102处的两个同心环定位的配置。图6b示出其中流体出口109a、109b和流体排出口119a、119b分别沿板101、102处的多个同心环定位的配置。图6c示出其中流体出口109a、109b和流体排出口119a和119b包括环形形状的配置。流体出口109a、109b和流体排出口119a和119b在两个板101、102处同心。与图6c相比,图6d示出具有多个环形流体出口109a、109b和流体排出口119a和119b的配置。对于所有配置,流体排出口119a、119b是可选的。流体可以经过(迷宫)密封件113离开调节体积112也是可选的。不具有流体排出口119a、119b的配置是相对地不太复杂的且与具有流体排出口119a、119b的配置相比,可以实现调节体积112中的较高压力。另一方面,流体排出口119a、119b可以增大流体轴承硬度。
86.根据实施例,图2a至图6d中的调节装置100包括用于减少在物体调节位置中达到物体的不想要的颗粒的颗粒屏蔽装置。所述屏蔽装置包括被配置成释放流体以用于减少在物体调节位置中达到物体的不想要的颗粒的流体出口(例如图2a至图6d中的流体出口109、109a、109b)。根据实施例,图2a至图6d中的流体出口109、109a、109b可以提供热调节、晶片平坦化、和减少在物体调节位置中达到物体的不想要的颗粒。
87.图7示意性地示出本发明的俯视图,其中针对以下解释不必要的若干特征已经为清楚起见而被省去。在图7中,指示了调节体积112,并且可以看到在所示出的实施例中,调节装置100包括三个支撑销103。图7还示出可选地,调节装置100包括预调节模块300。
88.在实施例中,预调节模块300是适于在物体104布置于调节体积112中之前降低所述物体的温度的预冷却模块300。在这种实施例中,需要物体104在较短时间内定位在调节体积112中以被冷却至预定温度,这是由于物体104在被布置于调节体积112中之前已经较接近于所述预定温度。如此,调节装置100的吞吐量可以被改善。例如,所述物体104可以在6秒中被布置于调节体积112中。例如,物体104的温度可以在被布置于调节体积112中之前处于预定温度的大致正负35mk内、和例如当从调节体积112移除时处于正负1.5mk内。
89.在实施例中,预调节模块300是适于在物体104被布置于调节体积112中之前增加所述物体的温度的预加热模块300。在将物体104布置于调节体积112中之前增加物体104的温度导致对于调节体积112中进行的调节的较快响应。
90.图7还示出:可选地,翘曲测量单元350被布置于预调节模块300中。翘曲测量单元350适于确定距离信息131并且适于经由输出端子发送距离信息131至控制单元120的输入端子120.1。翘曲测量单元350可以使用已知方法确定所述距离信息131以例如测量物体104的翘曲和/或定向,本领域技术人员知晓如何实施所述方法。应注意翘曲测量单元350也可以被布置于调节装置100或物体处理装置500中的任何其它合适的部位上。
91.本发明还涉及一种用于接收物体104的平台设备800。平台设备800包括载物台400、根据本发明的包括根据本发明的调节装置100的物体处理装置500,和适于从所述物体处理装置500接收物体104并且将所述物体104布置于载物台403上方的物体夹持器600。
92.所述载物台403可以例如与图1中示出的衬底台wt对应。参考图1和图7,本发明还涉及光刻设备la,包括根据本发明的用于接收物体104(包括衬底w)的平台设备800,其中光刻设备la适于将来自图案形成装置ma的图案投影至衬底w上。
93.可选地,调节装置100和/或物体处理装置500和/或平台设备800和/或光刻设备la可以被布置于具有低于大气压的压力(例如具有低于10pa的压力,例如大致2pa)的真空环境中。这可以例如是当光刻设备la被配置成发射包括euv辐射的辐射束b时的情况。应注意在这些实施例中,调节体积112内部的压力可以在操作使用期间大于调节体积112外部的压力。
94.图7示出在实施例中,第一物体夹持器600可以包括可以从支撑销103接收物体104的第一物体支撑件601。第一物体夹持器600是允许在所述载物台400上方移动物体104的多轴机器人。平台设备包括三个平台支撑销403用于当物体104被布置于载物台400上方时支撑所述物体。图7还示出可选地第一物体夹持器600由经由输出端子120.7发送控制信号137至输入端子600.1的控制单元120控制。
95.调节装置100可选地包括适于例如使用第二物体支撑件701将物体104布置于支撑销103上方的第二物体夹持器700。当调节装置100包括预调节模块300时,第二物体夹持器700也可以适于从所述预调节模块300接收物体104。可选地,第二物体夹持器700由经由输出端子120.8发送控制信号138至输入端子700.1的控制单元120控制。
96.在实施例中,第一物体夹持器600和/或第二物体夹持器700可以用类似于披露于us7486384b2中的支撑结构的方式被实施,和/或包括所述装置的一个或更多个特征。us7486384b2以引用的方式而被合并入本文中。
97.应注意,虽然仅一个物体104在图7中示出,但在实践中可以能够将第一物体104布置于预调节体积300中,而另外的物体被布置于调节体积100中和/或另外的物体被布置于载物台400上方。这可以例如改善吞吐量。
98.可选地,预调节模块300包括用类似于调节体积100的方式被实施的第二调节体积312。在那种情况下,调节装置100因而包括可以例如适于当物体104在调节体积112中时与物体104串行地调节第二物体的第二调节体积312,其中第二调节体积312以类似于调节体积112的方式被实施。
99.图8示出其中调节装置100包括适于当物体104在调节体积112中时与物体104并行地调节第二物体1104的第二调节体积1112的另一实施例,其中第二调节体积1112以类似于调节体积112的方式被实施。通过并行调节物体104和第二物体1104,吞吐量可以被增加和/或调节时间可以被增加,所述调节时间是指当相应的第一板和第二板在物体调节位置中时
所述物体104被布置于调节体积112中的时间或第二物体1104被布置于第二调节体积1112中的时间。增加调节时间允许确保可能更接近于所需温度来调节物体104或第二物体1104的温度。例如,所述物体104可以在12秒中布置于调节体积112中。例如,物体104的温度可以在布置于调节体积112中之前处于预定温度的大致正负70mk内、和例如当从调节体积112移除时处于正负1.5mk内。
100.在上述实施例的情境下,应注意以类似于调节体积112而实施的第二调节体积312、1112应被理解为意味着已在本文中参考具有调节体积112的调节装置100而加以解释的任何特征或实施例也可以被应用于第二调节体积312、1112。还注意,可以能够提供以类似于调节体积112而实施的另外的调节体积以用于串行或并行调节另外的物体,例如第三、和/或第四、和/或第五、和/或第六调节体积。
101.在图2a至图8中示出的示例中,单一控制单元120被设置用于若干功能性,诸如接收距离信息134和检测信号136,和控制所述泵151、所述支撑销致动器114、致动器单元105、所述第一物体夹持器600和第二物体夹持器700。然而,应了解,也可以提供用于执行这些功能性中的一个或更多个功能性的多个控制单元。
102.虽然可以在本文中具体地参考在ic制造中光刻设备的使用,但应理解,本文中所描述的光刻设备可以具有其它应用。可能其它应用包括制造集成光学系统、用于磁畴存储器的引导和检测图案、平板显示器、液晶显示器(lcd)、薄膜磁头等。
103.虽然可以在本文中具体地参考在光刻设备的情境下的本发明的实施例,但本发明的实施例可以用于其它设备中。本发明的实施例可以形成掩模检查设备、量测设备或测量或处理诸如晶片(或其它衬底)或掩模(或其它图案形成装置)的物体的任何设备的部件或部分。这些设备一般可以被称为光刻工具。这种光刻工具可以使用真空条件或周围(非真空)条件。
104.虽然上文可能已经具体地参考在光学光刻术的情境下对本发明的实施例的使用,但应了解,在情境允许的情况下,本发明不限于光学光刻术,并且可以用于其它应用(例如压印光刻术)中。
105.在情境允许的情况下,可以以硬件、固件、软件或其任何组合实施本发明的实施例。本发明的实施例也可以被实施为储存在机器可读介质上的指令,其可以由一个或更多个处理器读取和执行。机器可读介质可以包括用于储存或传输以可以由机器(例如,计算装置)读取的形式的信息的任何机构。例如,机器可读介质可以包括:只读存储器(rom);随机存取存储器(ram);磁性储存介质;光学储存介质;闪存装置;电学、光学、声学或传播信号的其它形式(例如,载波、红外信号、数字信号等)等。另外,固件、软件、例程、指令可以在本文中被描述为执行某些动作。然而,应了解,这些描述仅是方便起见,并且这些动作实际上由计算装置、处理器、控制器或执行固件、软件、例程、指令等等的其它装置引起。并且如此进行可以使致动器或其它装置与实体世界相互作用。
106.虽然上文已描述本发明的特定实施例,但将了解,可以以与所描述的方式不同的其它方式来实践本发明。上方描述意图是说明性的,而不是限制性的。由此,本领域技术人员将明白,可以在不背离下文所阐述的权利要求的范围的情况下对所描述的本发明进行修改。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。