1.本发明涉及智能假肢控制技术领域,特别涉及一种具有反馈机制的智能假肢控制系统及方法。
背景技术:
2.假肢是截肢者重要的运动功能替代工具,是为弥补截肢者肢体损伤,代偿肢体功能而制造、装配的人工肢体。下肢假肢,尤其是膝关节假肢的普及和安装,是解决截肢者基本需求的一项迫切任务。
3.人体的下肢运动具有非常强的协调性,下肢运动同时依靠肌肉、中枢神经、骨骼和周围神经系统的作用实现协调。下肢运动具有可重复性、周期性和约束性,常见的下肢运动包括上下楼梯、平地行走等,这也是下肢运动障碍人群最大的辅助需求,是智能假肢的核心功能。
4.人体的下肢运动控制过程是一个双向的过程,不仅需要通过神经控制骨骼肌带动肢体运动,还需要通过视觉、触觉等感知器官获得反馈信息。然而现有假肢只是补偿了其运动能力,无法补偿人体所需的感知反馈,比如:足底离地的状态和地面的反作用力等;也就无法感知并克服不平坦地面、异物硌绊、路面粘滑等外部扰动;进而无法实现躯体、残肢髋关节与假肢膝关节之间的协调控制。
5.此外,智能假肢的控制器也只能通过间接的方式判断穿戴者的运动意图,存在判断的延迟和误识别问题,同样会影响假肢关节的准确控制。如果无法感知到交互对象,截肢者无法完全控制四肢运动,也就很难使用假肢完成任何简单的任务。且智能假肢在正常行走时,应当以配合残肢髋关节和健肢的协调运动为控制目标;当出现因为硌、绊、滑等引起跌倒的危险情况发生时,应当使假肢穿戴者及时感知到危险并恢复平衡。且不同截肢者截肢的长度各不相同,每个人的运动习惯也存在差异,目前在使用同一型号假肢时,智能假肢不能根据不同使用者进行控制参数的自整定。
6.因此,在现有对智能假肢控制的基础上,如何实现对智能假肢进行更为精准地控制,成为本领域技术人员亟需解决的技术问题。
技术实现要素:
7.鉴于上述问题,本发明提出了一种至少解决上述部分技术问题的具有反馈机制的智能假肢控制系统及方法,具备反馈控制机制,可实现对智能假肢进行更为精准地控制。
8.本发明实施例提供一种具有反馈机制的智能假肢控制系统,包括:脑电采集设备、传感器系统、微型处理器和驱动控制系统;
9.所述脑电采集设备由脑电干电极和头部放大器构成;所述脑电干电极用于获取脑电信号;所述头部放大器用于对所述脑电信号进行初步处理;
10.所述传感器系统由压力传感器和角度传感器构成,用于采集假肢脚底和膝盖周围的反馈信号;
11.所述微型处理器用于根据初步处理后的所述脑电信号和所述反馈信号,生成控制指令;
12.所述驱动控制系统用于根据所述控制指令驱动智能假肢完成相应的动作。
13.进一步地,所述头部放大器由运算放大器与滤波器组成;
14.所述运算放大器用于对所述脑电信号进行放大;
15.所述滤波器用于对放大后的所述脑电信号进行滤波处理。
16.进一步地,所述驱动控制系统由蓝牙通信模块和驱动控制模块组成;
17.所述蓝牙通信模块分别与所述脑电采集设备、传感器系统、微型处理器和驱动控制模块相连接;
18.所述蓝牙通信模块用于将初步处理后的所述脑电信号和所述反馈信号传输至所述微型处理器;
19.所述驱动控制模块通过所述蓝牙通信模块接收所述微型处理器生成的控制指令,并通过驱动电机驱动智能假肢完成相应的动作。
20.进一步地,所述微型处理器根据初步处理后的所述脑电信号和所述反馈信号,分别判断并提取智能假肢的不同工作指令,以及对所述智能假肢进行模式识别,生成控制指令。
21.本发明实施例还提供一种具有反馈机制的智能假肢控制方法,适用于上述任一项所述的一种具有反馈机制的智能假肢控制系统,该方法包括:
22.获取脑电信号,并对所述脑电信号进行初步处理;
23.采集假肢脚底和膝盖周围的反馈信号;
24.根据初步处理后的所述脑电信号和所述反馈信号,生成控制指令;
25.根据所述控制指令,驱动智能假肢完成相应的动作。
26.进一步地,对所述脑电信号进行初步处理,包括:
27.对所述脑电信号进行放大;
28.对放大后的所述脑电信号进行滤波处理。
29.进一步地,根据初步处理后的所述脑电信号和所述反馈信号,生成控制指令,包括:
30.根据初步处理后的所述脑电信号,判断并提取智能假肢的不同工作指令;
31.根据所述反馈信号,对所述智能假肢进行模式识别;
32.根据所述智能假肢的不同工作指令和模式识别结果,生成控制指令。
33.本发明实施例提供的上述技术方案的有益效果至少包括:
34.本发明实施例提供的一种具有反馈机制的智能假肢控制系统,包括:脑电采集设备、传感器系统、微型处理器和驱动控制系统;脑电采集设备由脑电干电极和头部放大器构成;脑电干电极用于获取脑电信号;头部放大器用于对脑电信号进行初步处理;传感器系统由压力传感器和角度传感器构成,用于采集假肢脚底和膝盖周围的反馈信号;微型处理器用于根据初步处理后的脑电信号和反馈信号,生成控制指令;驱动控制系统用于根据控制指令驱动智能假肢完成相应的动作。该系统具备反馈控制机制,可以实现对智能假肢进行更为精准地控制。
35.本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变
得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
36.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
37.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
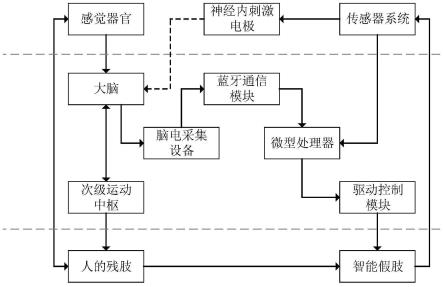
38.图1为本发明实施例提供的具有反馈机制的智能假肢控制系统结构示意图。
具体实施方式
39.下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
40.本发明实施例提供一种具有反馈机制的智能假肢控制系统,参照图1所示,包括:脑电采集设备、传感器系统、微型处理器和驱动控制系统;
41.脑电采集设备由脑电干电极和头部放大器构成;脑电干电极用于获取脑电信号;头部放大器用于对脑电信号进行初步处理;
42.传感器系统由压力传感器和角度传感器构成,用于采集假肢脚底和膝盖周围的反馈信号;
43.微型处理器用于根据初步处理后的脑电信号和反馈信号,生成控制指令;
44.驱动控制系统用于根据控制指令驱动智能假肢完成相应的动作。
45.本实施例提供的具有反馈机制的智能假肢控制系统,具备反馈控制机制,能够实现对智能假肢进行更为精准地控制。
46.具体地,本实施例中的智能假肢指旋转成形术后安装的智能假肢,为包括膝关节的假肢。
47.脑机接口系统由脑电采集设备与微处理器模块组成。
48.其中,脑电采集设备可设置成可穿戴产品,其上设置有脑电帽,进而可穿戴在假肢穿戴者的头部。脑电帽内部设置有电极(脑电干电极)和头部放大器。脑电干电极与人体头部皮肤相接触以获取脑电信号。头部放大器由运算放大器与滤波器组成,运算放大器用于对脑电信号进行放大,滤波器用于对放大后的脑电信号进行滤波处理获得滤波后的脑电信号。运算放大器的输入端接脑电干电极,输出端接滤波电路。
49.具体地,脑电采集设备可采用g.nautilus pro flexible无线多模态生物电信号采集设备,支持临床环境下的生物电信号采集;其上的脑电干电极通道 32/16/8无线eeg通道可自由选择,每个通道1.024mhz内部采样,频率高,不需要电脑即可记录高分解率的大脑数据。电极位置灵活可调,可自由移动至全脑160个任意位置。如果要求传播区域密度高,则选用32无线eeg通道,要求传播区域密度低,则选用8无线eeg通道。
50.微处理器模块为设置在穿戴智能假肢的残肢上的微型处理器,用于完成对脑电信号的处理,包括:对脑电信号的预处理、特征提取及模式识别和假肢人机协同控制。
51.预处理:微型处理器可以根据采集到的脑电信号判断假肢的不同工作指令;
52.特征提取:提取假肢工作指令;
53.模式识别:通过感知反馈系统反馈给微型处理器的信息进行模式识别(“配合模式”或“保护模式”);
54.假肢人机协同控制:由残肢残留神经信号和微型处理器发出的控制指令同时控制假肢进行动作。
55.进一步地,感知反馈系统由传感器系统和神经内刺激电极组成。
56.传感器系统由压力传感器和角度传感器组成,其中,压力传感器分别设置在假肢脚底和膝盖周围;角度传感器设置在膝盖周围。在假肢脚底装有多个压力传感器,以感知足部压力;在膝盖周围安装压力传感器和角度传感器,以感知膝关节角度,随时了解截肢者的步态。在未发生“硌、绊、滑”等引起跌倒的危险状况时,假肢脚底与膝盖周围设置的传感器的反馈信号较平稳,发生危险状况时,反馈信号变化较大。将传感器采集的信号通过蓝牙通信模块传送至脑机接口系统的微型处理器。该反馈信号包括:感知足部压力的信号和感知膝关节角度的信号。
57.将神经内刺激电极植入截肢者大腿的残余神经。传感器内部电路将采集到的假肢的传感器数据转换成电信号,并通过神经内刺激电极传回残肢周围神经系统,沿上行传导通路传至脑干和小脑,从而形成一种神经反馈机制,使截肢者能够感受到膝关节运动和脚底接触地面的感觉。通过这些传感器驱动神经刺激,让假肢具有“触觉”,就像身体的一部分。传感器内部电路可将采集到的物理量转变为电信号。
58.通过研究哪些信号最符合行走时的自然感觉,并将这些信号传递给神经内刺激电极进而传递给大脑,帮助截肢者相应的调整步态。实现假肢控制参数的自整定和灵活适配。其中,最终这些信号确定为设置在假肢脚底和膝盖周围的压力传感器采集的信号;以及设置在膝盖周围的角度传感器采集的信号。
59.人自然行走时,膝盖周围压力传感器的反馈信号和假肢脚底压力传感器的反馈信号的变化应该是呈周期性变化的;对于在平地行走、上下楼梯、上下坡路行走时,信号的幅值和周期变化的频率不同,可以通过训练,得到不同穿戴者在不同环境下自然行走时的反馈信号。
60.驱动控制系统由蓝牙通信模块和驱动控制模块组成。蓝牙通信模块一方面完成脑电采集设备采集的脑电信号与微型处理器之间的通信,另一方面将传感器系统采集的信号传送至微型处理器,将微型处理器生成的指令传送至驱动控制模块,实现控制指令和信息的无线传输。驱动控制模块通过驱动相应电机来实现对假肢的驱动控制。
61.微型处理器对驱动控制系统发出控制指令;微型处理器模块生成控制指令;驱动控制系统通过蓝牙通信模块获取控制指令。
62.微型控制器对由脑电采集设备采集的脑电信号进行处理,同时微型控制器根据感知信息(包括:通过感觉器官直接获得,感觉器官获得的感知信号沿上行感知传导通路传至脑干和小脑,通过脑电采集设备采集获取;以及传感器系统采集的信号),确定假肢的整体的动作状态及相应的控制策略,对驱动控制模块发出驱动信号,控制智能假肢完成相应的动作。
63.根据设置在膝盖周围的角度传感器采集的反馈信号获取假肢状态参数,若反馈信
号呈现周期性的变化则说明假肢在进行周期性的动作,如行走;若反馈信号保持不变则说明假肢处在静止状态,如站立或坐位。
64.根据设置在假肢脚底和膝盖周围的压力传感器采集的反馈信号获取环境信息参数。假肢穿戴者在不同类型路面上行走时会获得不同强度的压力传感器反馈信号,通过反馈信号的不同来获得环境信息参数,如假肢穿戴者在平地正常行走时,压力传感器反馈信号较稳定,当发生磕绊时,压力传感器反馈信号变得不稳定。
65.传感器系统中的每个传感器安置在不同的区域,可检测最小的压力或剪切力。通过微处理器模块汇总测量结果,可以准确地确定假肢如何弯曲或伸展。同时将神经内刺激电极植入截肢者大腿的残余神经,并将假肢的传感器数据转换成电信号并传回残肢周围神经系统,形成一种神经反馈机制,使得截肢者能够感受到膝关节运动和脚底接触地面的感觉,使假肢穿戴者能够感觉到假肢的运动状态。
66.智能假肢又根据环境状况分为“配合模式”和“保护模式”。“配合模式”主要工作在正常环境下,“保护模式”工作在因硌、绊、滑等引起跌倒的危险情况发生时。智能假肢在正常行走时,应以配合残肢髋关节和健肢的协调运动为控制目标,而当出现因为硌、绊、滑等引起跌倒的危险情况发生时,需要迅速从“配合模式”切换到“保护模式”,同时通过传感器系统采集的突变信号传递到神经内刺激电极,从而使得假肢穿戴者感知到危险并与假肢关节通过整体“条件反射式”的协同动作,恢复平衡或者保证最小的伤害程度。
67.如此使得假肢穿戴者不用经常看假肢就能感觉到“腿”的存在,可以使得假肢穿戴者的步行能力得到明显改善,以更自然的步态、更快的速度在沙质地面行走,同时可以使得穿戴者的精神更加放松。
68.传统假肢仅仅是辅助行走的工具,无法像身体的一部分让使用者拥有更自然舒适的体验,也不能向截肢者传递运动或地面相互作用的感觉信息,即现有假肢只是补偿了其运动能力,无法补偿人体所需的感知反馈。本实施例通过直接将外部信号传递给神经系统,实现感觉反馈,可以将假肢末端的“触感”信息通过感知反馈模块反馈给假肢使用者,从而使得使用者获取与真实肢体类似的“触感”,有效改善行走体验。本实施例通过脑电采集模块和感知反馈模块的相互配合,能够实现假肢控制参数的自整定和灵活适配。本实施例建立由假肢到人的信息反馈通道,不仅能实现正常行走、站立等常规动作的人机协调控制,对发生绊、滑等异常的安全保护具有更重要的作用,可以从人、机、环境综合考虑,实现假肢与穿戴者之间的协调控制。建立由假肢到人的信息反馈通道,不仅能实现正常行走、站立等常规动作的人机协调控制,对发生绊、滑等异常的安全保护具有更重要的作用。
69.基于同一发明构思,本发明实施例还提供了一种具有反馈机制的智能假肢控制方法,由于该方法适用于前述具有反馈机制的智能假肢控制系统,因此该方法的实施可以参见前述系统的实施,重复之处不再赘述。
70.本发明实施例还提供了一种具有反馈机制的智能假肢控制方法,包括:
71.获取脑电信号,并对脑电信号进行初步处理;
72.采集假肢脚底和膝盖周围的反馈信号;
73.根据初步处理后的脑电信号和反馈信号,生成控制指令;
74.根据控制指令,驱动智能假肢完成相应的动作。
75.其中,对脑电信号进行初步处理,包括:
76.对脑电信号进行放大;
77.对放大后的脑电信号进行滤波处理。
78.其中,根据初步处理后的脑电信号和反馈信号,生成控制指令,包括:
79.根据初步处理后的脑电信号,判断并提取智能假肢的不同工作指令;
80.根据反馈信号,对智能假肢进行模式识别;
81.根据智能假肢的不同工作指令和模式识别结果,生成控制指令。
82.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的方法而言,由于其与实施例公开的系统相对应,所以描述的比较简单,相关之处参见系统部分说明即可。
83.显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。