技术特征:
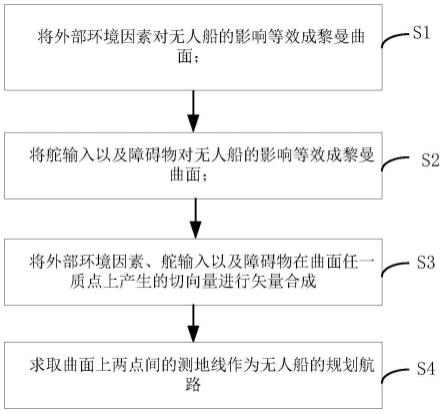
1.一种基于测地线的无人船航路规划方法,其特征在于,包括以下步骤,s1、将外部环境因素对无人船的影响等效成黎曼曲面;s2、将舵输入以及障碍物对无人船的影响等效成黎曼曲面;s3、将外部环境因素、舵输入以及障碍物在曲面任一质点上产生的切向量进行矢量合成;s4、求取曲面上两点间的测地线作为无人船的规划航路。2.根据权利要求1所述的基于测地线的无人船航路规划方法,其特征在于:所述s1、将外部环境因素对无人船的影响等效成黎曼曲面具体包括:(1)海浪以ξ-η为一个水平面,浪高的表达形式即:式中,a
i
为第i次谐波的幅值;ε
i
为第i次谐波的初相位,是在0~2π之间均匀分布的随机变量;ω
i
为第i次谐波的角频率;k
i
为第i次谐波的波数,k
i
=ω
i2
/g,g为重力加速度;μ为海浪方向角;在重力场、风的双重作用下,水流产生变形就形成浪,黎曼空间表示就是浪形状本身;(2)海风根据时间常数相对于无人船航行时间将海上的风产生分为两类;第一类海风稳流风时间周期较大,幅值大小服从雷利分布;海风稳流风对船舶运动产生的影响与船舶遭遇风向角有关,在黎曼几何中斜面对无人船航行轨迹改变与海风对无人船吹拂后运动轨迹一致,针对不同的遭遇风向角,稳流风等效成不同倾斜程度的斜面;第二类海风湍流风,由无数谐波组成,其幅值、方向与频率都是随机变化的,用随机海浪理论分析其变化特性。3.根据权利要求2所述的基于测地线的无人船航路规划方法,其特征在于:所述s2、将舵输入以及障碍物对无人船的影响等效成黎曼曲面,具体包括:(1)舵输入控制量船舶航行时,当舵叶平行于船舶行进方向时,舵叶两侧受到的水作用力相等,此时不会对船舶的运动方向产生影响;当舵叶通过舵轮的控制,产生一个偏转角,两侧的水流不再保持一致,迎水面和背水面产生压力差,再加上水流与舵叶之间的摩擦力,推动着船舶转向;设转动回转半径为r,则舵浆的转动力矩在黎曼几何中等效为锥形旋转面;(2)障碍物考虑到无人船航行的安全问题,如果船舶遇到的障碍物为其他船只,还要对障碍船舶所等效的三维立体图形进行膨胀处理,还需要通过gps得到运动船只的方向和位置信息,通过ais和arpa来计算动态障碍物的运动信息,根据其航行的速度及方位进行预判是否与本船有相撞的危险,从而进行避碰;根据障碍物的大小、方位及其运动的速度、方向,将其等效为曲面上的三维图形,表现形式为平面上凸出的柱体,其占地面积与障碍物的长宽有关,其高度与障碍物的体积有关,在平面上的位置与其运动的速度和方向有关。4.根据权利要求1所述的基于测地线的无人船航路规划方法,其特征在于:所述s3、将外部环境因素、舵输入以及障碍物在曲面任一质点上产生的切向量进行矢量合成,具体包
括:将非线性力学体系展现在几何空间,力学体系中的状态位置和速度使用几何的流形位置空间、切向量速度空间表示,控制的输入使用流形的输入空间表示,其运动轨迹则表示为切向量在流形空间的积分曲线;无人船的运动空间,在某一个质点上有各种因素对其产生影响,在该质点上的切向量满足矢量合成原理,合成后产生一个新的空间。5.根据权利要求1所述的基于测地线的无人船航路规划方法,其特征在于:所述s4、求取曲面上两点间的测地线作为无人船的规划航路,具体包括:对试验区域地图进行灰度处理,分成可行区域与不可行区域,然后将其矢量化为三角网格模型,用边、面、点进行表示;岸边表示为能量较高的凸面,表现形式为曲面中较高的部分;河道表示为能量较低的凹面,表现形式为曲面中较低的部分;同时,在河道中叠加随机风浪干扰,观察航路规划效果;障碍物船舶在地图中等效为底面为多边形的三维图形,图形的大小由目标障碍物的大小决定;对障碍船舶所等效的三维立体图形进行膨胀化处理,同时根据其航行的速度以及方位等进行预测判断是否与本船有相撞的危险,从而进行避碰;在地图上确定起始点和终点,下面将在合成的曲面上求取起始点到终点的测地线;采用mmp算法和dijkstra算法来实现;其中mmp算法为以窗口的传播为途径,逐渐覆盖到模型的全部表面,从而计算模型中任何一点到源点的测地距离以及测地路径;dijkstra算法为从源点以最短路径长度递增,向外扩展直到目的点,逐次生成最短路径。6.一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行如权利要求1至5中任一项所述方法的步骤。
技术总结
本发明是一种基于测地线的无人船航路规划方法及存储介质,包括将风、浪、流等环境干扰用三角网格模型在黎曼空间中表示,将无人船系统变成无约束的力学系统进行控制,该系统运动轨迹为黎曼曲面上两点间的测地线,以此规划出无人船的航路。本发明不采用以往的无人船路径规划方法,而是将环境模型等效成黎曼曲面后,在上面进行数值计算得出三维曲面上的测地线,将其作为规划航路应用在无人船自主航行系统中。无约束的力学系统在黎曼空间的最优运动轨迹是黎曼空间的测地线,保障系统按照期望路线消耗能源最少、以较短时间、安全可靠地到达目的地。的地。的地。
技术研发人员:闫蓟平 陆子龙 李宝安
受保护的技术使用者:北京航空航天大学合肥创新研究院(北京航空航天大学合肥研究生院)
技术研发日:2022.09.30
技术公布日:2023/1/31
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。