1.本发明属于车轮吹扫技术领域,具体涉及一种车轮表面积水自动吹扫系统。
背景技术:
2.底漆涂装线为阴极电泳工艺,车轮产品在挂具上通过电泳线后需经过纯水洗等工艺,在车轮轮辋内侧及轮辋与轮辐夹缝部位积存积水(液)。车轮进入烘干工序后,这些部位的积水在高温条件下逐步蒸发,导致出现水印和浮漆外观缺陷。
3.现有技术中,为防止外观缺陷,行业内涂装工序均在纯水洗与烘干工序之间设人工吹扫工位。由人工操作压缩空气气枪吹扫车轮表面积水。但是此项作业噪声大、环境湿度大,一般伴有烘干废气及其它有害气体。存在噪声聋、急性中毒、中暑等职业健康安全风险,而且人工成本较高。
技术实现要素:
4.针对现有技术存在的不足,本发明提供了一种车轮表面积水自动吹扫系统,可以模拟人工吹扫动作,并与挂链协同动作,代替人工对车轮表面积水进行自动吹扫。
5.为达到上述目的,本发明采用以下技术方案:一种车轮表面积水自动吹扫系统,包括挂杆、沿所述挂杆移动的用于挂扣车轮的挂链,还包括吹扫机构、设置于所述挂链上的触发板,所述吹扫机构包括用于吹扫车轮的风刀、用于驱动所述风刀转动的转动机构、用于驱动所述风刀移动的移动机构;
6.所述转动机构包括安装架、转轴、支座、第一伺服电机,所述风刀固定安装在所述安装架上,所述转轴一端与所述安装架固定连接,所述转轴另一端可转动的插装在所述支座上,所述转轴与车轮轴向平行,所述第一伺服电机固定安装在所述支座上,所述第一伺服电机用于驱动所述转轴转动;
7.所述移动机构包括第二滑板、触发光电开关、第二驱动机构,所述触发光电开关和所述支座均固定设置于所述第二滑板上,所述第二驱动机构用于驱动所述第二滑板沿所述挂链方向移动;
8.所述触发光电开关分别与所述第二驱动机构和所述第一伺服电机电连接。
9.作为优选的,所述第二驱动机构包括第二伺服电机、丝杆、丝杆螺母、第二滑轨,所述第二伺服电机动力输出端与所述丝杆固定连接,所述丝杆螺母与所述丝杆螺接,所述丝杆螺母与所述第二滑板固定连接,所述第二滑板与所述第二滑轨滑动配合,所述第二滑轨滑动方向与所述挂链移动方向平行。
10.作为优选的,所述系统还包括检测机构、用于驱动所述风刀靠近或远离车轮的第三驱动机构;
11.所述检测机构包括检测支座、气缸、浮动架、激光测量光电开关、反光板、电子尺、触发检测光电开关,所述气缸固定安装在所述检测支座上,所述气缸动力输出端与所述浮动架固定连接,所述激光测量光电开关和所述反光板均安装在所述浮动架上,所述激光测
量光电开关与所述反光板相对设置,所述激光测量光电开关和所述反光板分别设置于车轮上下两侧,所述电子尺用于测量所述浮动架的移动距离,所述触发检测光电开关固定安装在所述检测支座上,所述触发检测光电开关和所述激光测量光电开关均与所述气缸电连接。
12.作为优选的,所述第三驱动机构包括第三伺服电机、齿轮、齿条、第三滑轨、第三滑板,所述齿轮套设在所述第三伺服电机动力输出端外侧,所述齿条固定安装在所述第二滑板上,所述齿轮与所述齿条啮合,所述第三滑轨固定安装在所述第二滑板上,所述第三滑板与所述第三滑轨滑动配合,所述齿条与所述第三滑轨平行设置,所述第三伺服电机、所述支座均固定安装在所述第三滑板上。
13.作为优选的,所述检测机构还包括plc,所述电子尺与所述plc电连接,所述plc与所述第三伺服电机电连接。
14.作为优选的,所述移动机构包括至少两个所述触发光电开关,两个所述触发光电开关在沿着所述挂杆的方向上间隔距离小于所述触发板的宽度,两个所述触发光电开关均与所述plc电连接,所述plc与所述第二伺服电机电连接。
15.作为优选的,所述检测机构还包括第四滑轨、第四滑板,所述第四滑轨固定安装在所述检测支座上,所述第四滑板与所述第四滑轨滑动配合,所述浮动架固定安装在所述第四滑板上,所述第四滑板与所述气缸动力输出端固定连接。
16.作为优选的,所述系统还包括与所述挂链底端滑动配合的地轨,所述地轨设置于所述挂杆正下方。
17.作为优选的,所述地轨入口端设有导向板。
18.作为优选的,所述第一伺服电机动力输出端外侧套设有第一传动轮,所述转轴外侧套设有第二传动轮,所述第一传动轮与所述第二传动轮传动连接。
19.与现有技术相比,本发明的有益效果为:
20.1、本发明提供的一种车轮表面积水自动吹扫系统,可以模拟人工吹扫动作,并与挂链协同动作,代替人工对车轮表面积水进行自动吹扫。
21.2、本发明提供的一种车轮表面积水自动吹扫系统,通过模块式设计,机构与挂链相对独立,并且同步运行,完全实现无人化生产。显著降低安全职业健康风险,降低人工成本。
附图说明
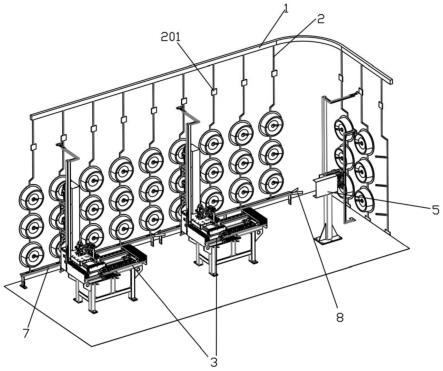
22.图1为本发明实施例提供的一种车轮表面积水自动吹扫系统的立体结构示意图;
23.图2为本发明实施例提供的一种车轮表面积水自动吹扫系统的吹扫机构的侧面结构示意图;
24.图3为本发明实施例提供的一种车轮表面积水自动吹扫系统的吹扫机构的部分立体结构示意图;
25.图4为本发明实施例提供的一种车轮表面积水自动吹扫系统的检测机构的侧面结构示意图;
26.图5为本发明实施例提供的一种车轮表面积水自动吹扫系统的第三驱动机构的相关部分立体结构示意图;
27.图6为本发明实施例提供的一种车轮表面积水自动吹扫系统的吹扫机构的部分立体结构示意图;
28.图7为本发明实施例提供的一种车轮表面积水自动吹扫系统的挂杆相关部分正面结构示意图。
29.附图中,各标号所代表的部件列表如下:
30.1、挂杆;2、挂链;3、吹扫机构;5、检测机构;7、地轨;8、导向板;201、触发板;301、风刀;302、安装架;303、转轴;304、支座;305、第一伺服电机;306、第一传动轮;307、第二传动轮;401、第二伺服电机;402、丝杆;403、丝杆螺母;404、第二滑轨;405、第二滑板;406、触发光电开关;501、检测支座;502、气缸;503、浮动架;504、激光测量光电开关;505、反光板;506、电子尺;507、触发检测光电开关;508、第四滑轨;509、第四滑板;601、第三伺服电机;602、齿轮;603、齿条;604、第三滑轨;605、第三滑板。
具体实施方式
31.下面结合具体实施例对本发明作进一步的详细说明,以使本领域的技术人员更加清楚地理解本发明。
32.需要说明的是,除非另有明确规定和限定,术语中“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,还可以是一体成型结构。对于本领域的普通技术人员,可以根据具体情况理解该类术语在本专利中的具体含义。
33.由于水分容易残留在车轮侧面的凹槽内,特别是下半圈车轮的侧面。因此,现有技术中,人工吹扫车轮时,往往是通过人工操作压缩空气气枪吹扫车轮侧面的凹槽,将车轮表面凹槽内残留的水分吹干。
34.基于上述吹扫方式,为了实现车轮的自动吹扫。本实施例提供了一种车轮表面积水自动吹扫系统。
35.如图1所示,本实施例提供的吹扫系统,包括挂杆1、沿所述挂杆1移动的用于挂扣车轮的挂链2,还包括吹扫机构3、设置于所述挂链2上的触发板201,所述吹扫机构3包括用于吹扫车轮的风刀301、用于驱动所述风刀301转动的转动机构、用于驱动所述风刀301移动的移动机构。
36.本实施例中,沿着所述挂链2移动的方向,可以依次设有两个所述吹扫机构3,对车轮进行两次吹扫,而且两个所述吹扫机构3的吹扫位置可以不同。举例来说,第一个所述吹扫机构3主要用于吹扫车轮整个侧面,第二个所述吹扫机构3主要用于吹扫车轮下半圈易积水的位置,这样可以保证车轮被充分吹扫干净。
37.具体的,如图2所示,所述转动机构包括安装架302、转轴303、支座304、第一伺服电机305,所述风刀301固定安装在所述安装架302上,所述转轴303一端与所述安装架302固定连接,所述转轴303另一端可转动的插装在所述支座304上,所述转轴303与车轮轴向平行,所述第一伺服电机305固定安装在所述支座304上,所述第一伺服电机305用于驱动所述转轴303转动。
38.为了达到较大的风力,所述风刀301的吹扫面积通常较小,因此,吹扫过程中需要转动所述风刀301,才能对车轮的侧面进行全面吹扫。举例来说,当所述挂链2移动至所述吹扫机构3处时,所述转轴303与车轮同轴,所述风刀301可以正好对着车轮侧面的底部,然后
通过所述第一伺服电机305驱动所述转轴303转动,进而带动所述安装架302进行转动,使得所述风刀301以车轮轮心为圆心进行摆动,这样,所述风刀301可以沿着车轮外圈进行摆动,所述风刀301对整个车轮侧面都可以吹扫到,效率高,吹扫效果佳。其中,通过调节所述第一伺服电机305动力输出端的转动角度,即可调整所述风刀301的摆动角度,进而调整对车轮的吹扫范围,实现对车轮不同区域进行吹扫的目的。
39.其中,所述第一伺服电机305动力输出端外侧套设有第一传动轮306,所述转轴303外侧套设有第二传动轮307,所述第一传动轮306与所述第二传动轮307传动连接。
40.通过所述第一伺服电机305驱动所述第一传动轮306转动,即可带动所述第二传动轮307转动,进而带动所述转轴303转动。
41.本实施例中,每个所述挂链2上可以挂靠三个车轮,三个车轮在不同的高度位置,与之对应的是,所述支座304上设有三组所述转轴303,三组所述转轴303各连接有一个所述风刀301,三组所述转轴303外侧各套设有一个所述第二传动轮307,所述第一传动轮306同时与三个所述第二传动轮307传动连接,这样,通过一个所述第一伺服电机305即可带动三个所述风刀301转动,同时完成三个车轮的吹扫,效率更高。
42.由于所述挂链2为持续移动状态,因此,需要将所述吹扫机构3与车轮进行同步移动,所述风刀301可以一直沿着车轮外圈进行摆动吹扫,这样才能保证对车轮侧面的持续吹扫。因此,本实施例中通过所述移动机构驱动所述吹扫机构3跟随车轮同步移动。
43.其中,如图3所示,所述移动机构包括第二滑板405、触发光电开关406、第二驱动机构,所述触发光电开关406和所述支座304均固定设置于所述第二滑板405上,所述第二驱动机构用于驱动所述第二滑板405沿所述挂链2方向移动。
44.通过所述第二驱动机构可以驱动所述第二滑板405沿所述挂链2方向移动,进而带动所述支座304沿所述挂链2方向移动,通过调节所述第二驱动机构的移动速度,即可使得所述支座304与车轮保持相同的速度移动,进而使得所述风刀301与车轮保持相同的速度移动。
45.所述触发光电开关406分别与所述第二驱动机构和所述第一伺服电机305电连接。
46.所述触发光电开关406用于检测是否有车轮经过,当所述触发光电开关406检测到所述触发板201时,即有车轮经过,此时即可启动所述第二驱动机构,驱动所述第二滑板405跟随车轮同步移动,使得所述风刀301与车轮保持相同的速度移动,开启所述风刀301,所述风刀301对车轮侧面进行持续吹扫,然后启动所述第一伺服电机305,所述第一伺服电机305动力输出端按照预设的旋转角度、往复次数、旋转速度,驱动所述风刀301对车轮做圆周方向的反复吹扫。所述第二滑板405移动至一定位置后停止,即完成该车轮的吹扫,然后所述第二驱动机构让所述第二滑板405回归至初始位置,同时,所述第一伺服电机305也随之回到初始位置,等待下一个车轮经过此处。
47.具体的,如图4所示,所述第二驱动机构包括第二伺服电机401、丝杆402、丝杆螺母403、第二滑轨404,所述第二伺服电机401动力输出端与所述丝杆402固定连接,所述丝杆螺母403与所述丝杆402螺接,所述丝杆螺母403与所述第二滑板405固定连接,所述第二滑板405与所述第二滑轨404滑动配合,所述第二滑轨404滑动方向与所述挂链2移动方向平行。
48.通过所述第二伺服电机401可以驱动所述丝杆402转动,带动所述丝杆螺母403沿着所述丝杆402滑动,进而带动所述第二滑板405滑动,且所述第二滑板405滑动方向与所述
挂链2移动方向平行。这样,通过控制所述第二伺服电机401动力输出端的转动速度,即可控制所述第二滑板405滑动速度,使得所述第二滑板405滑动速度与车轮的移动速度相同,即可使得所述风刀301与车轮保持同步移动。
49.另外,由于车轮的厚度不同,所述风刀301与车轮的间隔距离不同,导致吹扫效果不同。而且当车轮宽度较大或者车轮倾斜时,所述风刀301可能与车轮接触,导致吹扫失败。
50.为了避免上述情况,可以在吹扫之前对车轮与机构的距离进行测量,测量好距离之后,再根据测量的距离调整所述风刀301的位置。因此,本实施例中,所述系统还包括检测机构5、用于驱动所述风刀301靠近或远离车轮的第三驱动机构;
51.如图5所示,所述检测机构5包括检测支座501、气缸502、浮动架503、激光测量光电开关504、反光板505、电子尺506、触发检测光电开关507,所述气缸502固定安装在所述检测支座501上,所述气缸502动力输出端与所述浮动架503固定连接,所述激光测量光电开关504和所述反光板505均安装在所述浮动架503上,所述激光测量光电开关504与所述反光板505相对设置,所述激光测量光电开关504和所述反光板505分别设置于车轮上下两侧,所述电子尺506用于测量所述浮动架503的移动距离,所述触发检测光电开关507固定安装在所述检测支座501上,所述触发检测光电开关507和所述激光测量光电开关504均与所述气缸502电连接。
52.所述触发检测光电开关507用于检测是否有车轮经过,当所述触发检测光电开关507检测到所述触发板201时,即有车轮经过,此时启动所述气缸502,而所述激光测量光电开关504和所述反光板505分别位于车轮上下两侧。所述气缸502驱动所述浮动架503向车轮靠近,直至所述激光测量光电开关504与所述反光板505之间的垂直光线被车轮遮挡住,此时所述浮动架503向车轮移动的距离即车轮与所述检测机构5的距离,而且所述电子尺506可以读出该距离。然后所述气缸502驱动所述浮动架503回复至初始位置,等待下一个车轮到来。
53.本实施例中,车轮与所述检测机构5的距离,可以和车轮与所述吹扫机构3的距离相等,这样通过所述电子尺506读出的距离即所述吹扫机构3与车轮的距离,在此基础上可判断出所述第三驱动机构是否需要调整所述风刀301与车轮的距离。当所述吹扫机构3与车轮的距离过大时,可以驱动所述风刀301靠近车轮;当所述吹扫机构3与车轮的距离过小时,可以驱动所述风刀301远离车轮。
54.其中,所述检测机构5还包括第四滑轨508、第四滑板509,所述第四滑轨508固定安装在所述检测支座501上,所述第四滑板509与所述第四滑轨508滑动配合,所述浮动架503固定安装在所述第四滑板509上,所述第四滑板509与所述气缸502动力输出端固定连接。
55.所述气缸502驱动所述浮动架503向车轮靠近或远离时,可以带动所述第四滑板509在所述第四滑轨508上滑动,使得所述浮动架503的移动更加稳定,所述电子尺506测量的距离也更加准确。
56.具体的,如图5-6所示,所述第三驱动机构包括第三伺服电机601、齿轮602、齿条603、第三滑轨604、第三滑板605,所述齿轮602套设在所述第三伺服电机601动力输出端外侧,所述齿条603固定安装在所述第二滑板405上,所述齿轮602与所述齿条603啮合,所述第三滑轨604固定安装在所述第二滑板405上,所述第三滑板605与所述第三滑轨604滑动配合,所述第三伺服电机601、所述支座304均固定安装在所述第三滑板605上。
57.通过所述第三伺服电机601可以驱动所述齿轮602转动,由于所述齿轮602与所述齿条603啮合,所述齿条603与所述第三滑轨604平行设置,使得所述第三伺服电机601可以沿着所述齿条603移动,进而带动所述第三滑板605沿着所述第三滑轨604滑动。进而带动所述支座304沿着所述第三滑轨604滑动。所述第三滑轨604滑动的方向可以与车轮移动的方向垂直,所述支座304逐渐靠近车轮即可带动所述风刀301靠近车轮。
58.为了可以自动调节所述风刀301与车轮的距离,本实施例中,所述检测机构5还包括plc,所述电子尺506与所述plc电连接,所述plc与所述第三伺服电机601电连接。所述plc可以提取所述电子尺506的当前尺寸,将数据存储到缓存队列,然后传递至所述第三伺服电机601,所述第三伺服电机601即可针对各个车轮调整所述风刀301的位置。
59.本实施例中,如图7所示,所述移动机构包括至少两个所述触发光电开关406,两个所述触发光电开关406在沿着所述挂杆1的方向上间隔距离略小于所述触发板201的宽度,两个所述触发光电开关406均与所述plc电连接,所述plc与所述第二伺服电机401电连接。
60.当两个所述触发光电开关406均能检测到所述触发板201时,此时车轮到达所述风刀301处,然后驱动所述风刀301随着车轮一起移动。为了保证所述风刀301与车轮移动速度相同,在移动过程中,始终保持两个所述触发光电开关406能同时检测到所述触发板201,即所述触发板201没有脱离两个所述触发光电开关406,可保证车轮与所述风刀301的移动速度相同。如若有一个所述触发光电开关406未检测到所述触发板201,则可以将信息传递至所述plc,然后所述plc可以通过调整所述第二伺服电机401的转速,来调整所述触发光电开关406的移动速度,使得两个所述触发光电开关406能同时检测到所述触发板201,即可使得车轮与所述风刀301的移动速度相同。
61.最后,请再次参阅图1,为了防止所述挂链2晃动,本实施例中,所述系统还包括与所述挂链2底端滑动配合的地轨7,所述地轨7设置于所述挂杆1正下方。所述挂链2底端与所述地轨7滑动配合,可以保证所述挂链2移动时的稳定性。
62.其中,所述地轨7入口端设有导向板8。所述导向板8的设置有利于所述挂链2底端滑入所述地轨7。
63.综上所述,本实施例提供的一种车轮表面积水自动吹扫系统,可以模拟人工吹扫动作,并与挂链协同动作,代替人工对车轮表面积水进行自动吹扫。
64.本发明中未对具体结构做出描述的机构、组件和部件均为现有技术中已经存在的现有结构。可以从市面上直接购买得到。
65.以上仅为本发明的较佳实施方案,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。