技术特征:
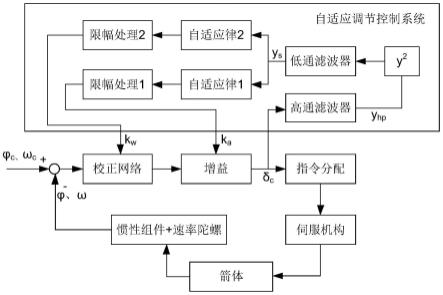
1.一种自适应调节的控制方法,其特征在于,包括:获取第一箭体姿态偏差信号,所述第一箭体姿态偏差信号用于指示实际箭体姿态和理论箭体姿态之间的偏差;根据所述第一箭体姿态偏差信号执行自适应律操作,得到调节系数;根据所述调节系数调整第二箭体姿态偏差信号,得到箭体指令信号;根据所述箭体指令信号,控制箭体的姿态角和/或角速度。2.根据权利要求1所述的方法,其特征在于,所述第二箭体姿态偏差信号和所述第一箭体姿态偏差信号相同。3.根据权利要求1所述的方法,其特征在于,所述第一箭体姿态偏差信号对应的周期在所述第二箭体姿态偏差信号对应的周期之前。4.根据权利要求1所述的方法,其特征在于,所述根据所述第一箭体姿态偏差信号执行自适应律操作,得到调节系数,包括:对所述第一箭体姿态偏差信号进行高通滤波处理,得到第一弹性能量信号;对所述第一弹性能量信号进行低通滤波处理,得到第二弹性能量信号;根据所述第二弹性能量信号执行自适应律操作,得到所述调节系数。5.根据权利要求4所述的方法,其特征在于,所述根据所述第一箭体姿态偏差信号执行自适应律操作,得到调节系数,包括:根据所述第一箭体姿态偏差信号执行自适应律操作,得到调节系数初值;当所述调节系数初值大于最大预设调节系数,所述调节系数为所述最大预设调节系数;当所述调节系数初值小于最小预设调节系数,所述调节系数为所述最小预设调节系数;当所述调节系数初值介于所述最小预设调节系数和所述最大预设调节系数之间,所述调节系数为所述调节系数初值。6.根据权利要求4所述的方法,其特征在于,所述第一弹性能量信号满足:y
hp
=g
hp
(s)δ
c
,g
hp
(s)表示所述高通滤波处理,δ
c
表示所述箭体指令信号。7.根据权利要求4所述的方法,其特征在于,所述第二弹性能量信号满足:g
lp
(s)表示所述低通滤波处理,y
hp
表示所述第一弹性能量信号。8.根据权利要求4所述的方法,其特征在于,所述根据所述第一箭体姿态偏差信号执行自适应律操作,包括:根据确定调节系数k,y
s
=d
al
(z)
·
(d
ah
(z)
·
l
zl
)2,α和β是大于零的自适应律常系数,d
ah
(z)、d
al
(z)分别表示高通滤波网络和低通滤波网络,l
zl
为控制指令,9.根据权利要求8所述的方法,其特征在于,激活函数满足:a、b、m是大于零的常系数。
10.根据权利要求8所述的方法,其特征在于,11.根据权利要求1至10中任一项所述的方法,其特征在于,所述调节系数包括增益调节系数和/或网络调节系数。12.一种自适应调节的控制系统,其特征在于,所述系统用于执行如权利要求1至11中任一项所述的方法。
技术总结
本申请涉及运载火箭领域,具体公开了一种运载火箭增益和网络参数自适应调节的控制方法和系统。控制方法包括:获取第一箭体姿态偏差信号,第一箭体姿态偏差信号用于指示实际箭体姿态和理论箭体姿态之间的偏差;根据第一箭体姿态偏差信号执行自适应律操作,得到调节系数;根据调节系数调整第二箭体姿态偏差信号,得到箭体指令信号;根据箭体指令信号,控制箭体的姿态角和/或角速度。本申请的方案对弹性振动采用了幅值稳定进行控制,促使弹性振动幅值减小,直到自适应律达到最新的平衡态。直到自适应律达到最新的平衡态。直到自适应律达到最新的平衡态。
技术研发人员:邵梦晗 潘豪 胡煜荣 胡海峰 宋征宇 尚腾 关玥 翟邵蕾
受保护的技术使用者:北京航天自动控制研究所
技术研发日:2022.09.30
技术公布日:2023/1/31
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。