1.本技术涉及电机领域,具体涉及一种转子、电机、动力总成和动力装置。
背景技术:
2.在电动汽车领域,车用电机为电动汽车的关键零部件之一。目前车用电机逐步朝着高速化、高效化、低噪声的方向发展。在电机的转动过程中,由于定子的齿和槽之间所受电磁力不同,转子转动时转矩会发生波动,这个波动被称为齿槽转矩。齿槽转矩会导致电机运行时产生振动和噪声。转子分段形成的磁体转子是减少齿槽转矩和转矩脉动,降低电磁振动的有效措施之一。但是现有的磁体转子由于斜极角的计算中仅按照削弱齿槽转矩以及转矩脉动而选定斜极角,而现有计算方法获得的斜极角并不能削弱转子的径向电磁力,例如低阶径向电磁力,从而造成无法进一步降低电机的噪声。
技术实现要素:
3.本技术提供了一种转子、电机、动力总成和动力装置,可同时削弱电机的齿槽转矩、转矩脉动以及低阶径向电磁力。
4.第一方面,本技术提供一种转子,该转子包括转子铁芯和沿转子铁芯的周向均匀设置的多个磁极,任一磁极包括至少一个沿转子铁芯的轴向设置的磁体;其中,沿转子铁芯的轴向,每个磁体包括多个磁段;每个磁体中至少存在两个磁段沿转子铁芯的周向错位设置,任意两个磁段之间沿转子铁芯的周向错位设置形成的错位角为两个磁段的斜极角,任一磁体的各磁段之间的最大斜极角θ满足:
[0005][0006]
其中,z为电机定子槽数,2p为转子的磁极总数,n为磁段的种类数;
[0007]
z、p和n均取自正整数,且n大于等于2且小于等于磁段的段数;
[0008]
lcm(z,2p)为电机定子槽数和转子磁极总数的最小公倍数。
[0009]
对于现有常规磁体转子,其斜极角按削弱齿槽转矩最优,选择的各段最大斜极角为但对于带载情况下的转矩脉动及径向电磁力,其并不能有效削弱。对于分数槽集中绕组电机而言,引起电机振动噪声的激励源通常为空间低阶时间特定倍频的径向电磁力。本技术的转子,通过将任一磁体的多个磁段之间的最大斜极角限定在上述范围内,可有效削弱电机的齿槽转矩和转矩脉动的同时,降低分数槽集中绕组空间低阶的10倍电频率径向电磁力。
[0010]
在一种可选的实现方式中,每个磁体中,任意相邻两个错位设置的磁段之间的斜极角α满足:
[0011][0012]
通过限定任意相邻两个错位设置的磁段之间的斜极角,可进一步削弱电机的齿槽
转矩和转矩脉动的同时,降低分数槽集中绕组空间低阶的10倍电频率径向电磁力,进而进一步降低电机的噪声。
[0013]
在一种可选的实现方式中,沿转子铁芯的轴向,任一磁体的多个磁段的排列结构包括一字型结构、v字型结构、z字型结构或w字型结构。当磁体沿转字铁芯的轴向设置为一字型磁体、v字型磁体、z字型磁体或w字型磁体均可获得低齿槽转矩、低转矩脉动以及低阶转子的径向电磁力。
[0014]
在一种可选的实现方式中,各磁体在转子铁芯的设置方式包括表贴式结构或内置式结构。在一种可选的实现方式中,在转子铁芯的径向面内,磁极呈一字型结构、v型结构或双v型结构。
[0015]
第二方面,本技术提供一种电机,该电机包括定子、转轴和如本技术第一方面的转子,所述转子与所述定子配合设置,所述转子与所述转轴固定连接。
[0016]
其中,所述定子套设于所述转子的外部,或,所述转子套设于所述定子的外部;所述定子和所述转子共轴线设置。
[0017]
本技术提供的一种电机,包括定子、转子和转轴,所述定子与所述转子配合设置,所述转子与所述转轴固定连接;
[0018]
所述转子包括转子铁芯和沿所述转子铁芯的周向均匀设置的多个磁极,任一所述磁极包括至少一个沿所述转子铁芯的轴向设置的磁体;
[0019]
沿所述转子铁芯的轴向,每个所述磁体包括多个磁段;每个所述磁体中至少存在两个所述磁段沿所述转子铁芯的周向错位设置,任意两个所述磁段之间沿所述转子铁芯的周向错位设置形成的错位角为所述两个磁段的斜极角;其中,
[0020]
所述电机的定子槽数为12,所述转子的磁极总数为10,所述磁段的种类数为2,所述电机的定子槽数和所述转子的磁极总数的最小公倍数为60,任一所述磁体的各所述磁段之间的最大斜极角θ满足:3
°
<θ≤3.6
°
。在一种可选实现方式中,每个所述磁体中,任意相邻两个错位设置的所述磁段之间的斜极角α满足:3
°
<α≤3.6
°
。
[0021]
本技术提供的一种电机,包括定子、转子和转轴,所述定子与所述转子配合设置,所述转子与所述转轴固定连接;
[0022]
所述转子包括转子铁芯和沿所述转子铁芯的周向均匀设置的多个磁极,任一所述磁极包括至少一个沿所述转子铁芯的轴向设置的磁体;
[0023]
沿所述转子铁芯的轴向,每个所述磁体包括多个磁段;每个所述磁体中至少存在两个所述磁段沿所述转子铁芯的周向错位设置,任意两个所述磁段之间沿所述转子铁芯的周向错位设置形成的错位角为所述两个磁段的斜极角;其中,
[0024]
所述电机的定子槽数为12,所述转子的磁极总数为10,所述磁段的种类数为3,所述电机的定子槽数和所述转子的磁极总数的最小公倍数为60,任一所述磁体的各所述磁段之间的最大斜极角θ满足:4
°
<θ≤4.8
°
。在一种可选实现方式中,每个所述磁体中,任意相邻两个错位设置的所述磁段之间的斜极角α满足:2
°
<α≤2.4
°
。
[0025]
本技术提供的一种电机,包括定子、转子和转轴,所述定子与所述转子配合设置,所述转子与所述转轴固定连接;
[0026]
所述转子包括转子铁芯和沿所述转子铁芯的周向均匀设置的多个磁极,任一所述磁极包括至少一个沿所述转子铁芯的轴向设置的磁体;
[0027]
沿所述转子铁芯的轴向,每个所述磁体包括多个磁段;每个所述磁体中至少存在两个所述磁段沿所述转子铁芯的周向错位设置,任意两个所述磁段之间沿所述转子铁芯的周向错位设置形成的错位角为所述两个磁段的斜极角;其中,
[0028]
所述电机的定子槽数为12,所述转子的磁极总数为10,所述磁段的种类数为4,所述电机的定子槽数和所述转子的磁极总数的最小公倍数为60,任一所述磁体的各所述磁段之间的最大斜极角θ满足:4.5
°
<θ≤5.4
°
。在一种可选实现方式中,每个所述磁体中,任意相邻两个错位设置的所述磁段之间的斜极角α满足:1.5
°
<α≤1.8
°
。
[0029]
本技术提供的一种电机,包括定子、转子和转轴,所述定子与所述转子配合设置,所述转子与所述转轴固定连接;
[0030]
所述转子包括转子铁芯和沿所述转子铁芯的周向均匀设置的多个磁极,任一所述磁极包括至少一个沿所述转子铁芯的轴向设置的磁体;
[0031]
沿所述转子铁芯的轴向,每个所述磁体包括多个磁段;每个所述磁体中至少存在两个所述磁段沿所述转子铁芯的周向错位设置,任意两个所述磁段之间沿所述转子铁芯的周向错位设置形成的错位角为所述两个磁段的斜极角;其中,
[0032]
所述电机的定子槽数为24,所述转子的磁极总数为10,所述磁段的种类数为2,所述电机的定子槽数和所述转子的磁极总数的最小公倍数为120,任一所述磁体的各所述磁段之间的最大斜极角θ满足:1.5
°
<θ≤1.8
°
。在一种可选实现方式中,每个所述磁体中,任意相邻两个错位设置的所述磁段之间的斜极角α满足:1.5
°
<α≤1.8
°
。
[0033]
本技术提供的一种电机,包括定子、转子和转轴,所述定子与所述转子配合设置,所述转子与所述转轴固定连接;
[0034]
所述转子包括转子铁芯和沿所述转子铁芯的周向均匀设置的多个磁极,任一所述磁极包括至少一个沿所述转子铁芯的轴向设置的磁体;
[0035]
沿所述转子铁芯的轴向,每个所述磁体包括多个磁段;每个所述磁体中至少存在两个所述磁段沿所述转子铁芯的周向错位设置,任意两个所述磁段之间沿所述转子铁芯的周向错位设置形成的错位角为所述两个磁段的斜极角;其中,
[0036]
所述电机的定子槽数为24,所述转子的磁极总数为10,所述磁段的种类数为3,所述电机的定子槽数和所述转子的磁极总数的最小公倍数为120,任一所述磁体的各所述磁段之间的最大斜极角θ满足:2
°
<θ≤2.4
°
。在一种可选实现方式中,每个所述磁体中,任意相邻两个错位设置的所述磁段之间的斜极角α满足:1
°
<α≤1.2
°
。
[0037]
本技术提供的一种电机,包括定子、转子和转轴,所述定子与所述转子配合设置,所述转子与所述转轴固定连接;
[0038]
所述转子包括转子铁芯和沿所述转子铁芯的周向均匀设置的多个磁极,任一所述磁极包括至少一个沿所述转子铁芯的轴向设置的磁体;
[0039]
沿所述转子铁芯的轴向,每个所述磁体包括多个磁段;每个所述磁体中至少存在两个所述磁段沿所述转子铁芯的周向错位设置,任意两个所述磁段之间沿所述转子铁芯的周向错位设置形成的错位角为所述两个磁段的斜极角;其中,
[0040]
所述电机的定子槽数为24,所述转子的磁极总数为10,所述磁段的种类数为4,所述电机的定子槽数和所述转子的磁极总数的最小公倍数为120,任一所述磁体的各所述磁段之间的最大斜极角θ满足:2.25
°
<θ≤2.7
°
。在一种可选实现方式中,每个所述磁体中,任
意相邻两个错位设置的所述磁段之间的斜极角α满足:0.75
°
<α≤0.9
°
。
[0041]
第三方面,本技术提供一种动力总成,该动力总成包括减速器和如本技术的电机,电机与减速器传动连接。
[0042]
第四方面,本技术提供一种动力装置,该动力装置包括如本技术的动力总成。
[0043]
上述第二方面至第四方面可以达到的技术效果,可以参照上述第一方面中的相应效果描述,这里不再重复赘述。
附图说明
[0044]
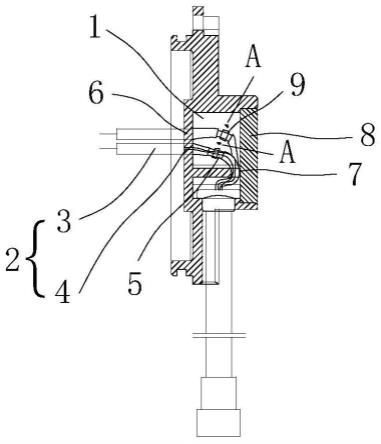
图1为本技术一种转子的结构示意图;
[0045]
图2为一种实施例的转子的端面结构示意图;
[0046]
图3为本技术另一种实施例转子的结构示意图;
[0047]
图4为本技术另一种实施例转子的结构示意图;
[0048]
图5为一种实施例的转子的端面结构示意图;
[0049]
图6为本技术一种实施例中的一个磁体的结构示意图;
[0050]
图7为本技术另一种实施例的转子的结构示意图;
[0051]
图8为本技术另一种实施例的磁体的结构示意图;
[0052]
图9为本技术另一种实施例的转子的结构示意图;
[0053]
图10为本技术另一种实施例的磁体的结构示意图;
[0054]
图11为本技术另一种实施例的转子的结构示意图。
[0055]
附图标记:
[0056]
11-转子;12-转子铁芯;121-铁芯段;13-磁极;14-磁体;141-磁段。
具体实施方式
[0057]
为了使本技术的目的、技术方案和优点更加清楚,下面将结合附图对本技术作进一步地详细描述。
[0058]
以下实施例中所使用的术语只是为了描述特定实施例的目的,而并非旨在作为对本技术的限制。如在本技术的说明书和所附权利要求书中所使用的那样,单数表达形式“一个”、“一种”、“所述”、“上述”、“该”和“这一”旨在也包括例如“一个或多个”这种表达形式,除非其上下文中明确地有相反指示。
[0059]
在本说明书中描述的参考“一个实施例”或“一些实施例”等意味着在本技术的一个或多个实施例中包括结合该实施例描述的特定特征、结构或特点。由此,在本说明书中的不同之处出现的语句“在一个实施例中”、“在一些实施例中”、“在其他一些实施例中”、“在另外一些实施例中”等不是必然都参考相同的实施例,而是意味着“一个或多个但不是所有的实施例”,除非是以其他方式另外特别强调。术语“包括”、“包含”、“具有”及它们的变形都意味着“包括但不限于”,除非是以其他方式另外特别强调。
[0060]
为方便理解,以下先对电机几个技术术语做解释说明。
[0061]
齿槽转矩(cogging torque):转子磁场周期性与电机定子的齿部和槽部互相作用产生的转矩。
[0062]
纹波转矩(ripple torque):气隙磁密谐波产生的转矩。随着转速提高,气隙磁密
波形的高频分量随之增大,产生高频噪声。
[0063]
电机在运行过程中,噪声的激励源主要有以下3部分:1)电磁噪声:电机自身转矩波动、径向电磁力引发的噪声。径向电磁力引发的噪声主要为电机的高频噪声来源。2)空气动力噪声:电机转子高速旋转时与空气摩擦产生噪声。3)机械噪声:电机转子不平衡力引起的振动,主要原因是电机转子的动平衡性能缺陷。其中,针对电磁噪声,最直接的方法就是在电机设计时使电机的转矩脉动、径向电磁力尽量小。电机的转矩波动主要由齿槽转矩以及纹波转矩组成。磁体转子是减小齿槽转矩和转矩脉动,从而降低电磁振动的简单有效的措施之一。不同的应用场景及工况下齿槽转矩、转矩脉动、径向电磁力对电磁噪声贡献不同。因此,斜极角度的选取不仅要考虑削弱齿槽转矩、转矩脉动,同样需要考虑径向电磁力的削弱。而现有的磁体转子在设计斜极角时并未考虑过如何去除径向电磁力的影响,尤其对于分数槽集中绕组的电机而言,现有斜极角的设计并不能有效削弱其转矩脉动及径向电磁力,进而造成无法进一步减少电机的电磁噪声。
[0064]
为解决径向电磁力对电机噪声的影响,本技术实施例提供一种转子。图1为本技术一种转子的结构示意图。图2为一种实施例的转子的端面结构示意图。如图1和图2所示,本技术实施例的转子11包括转子铁芯12和设于转子铁芯12的磁极13。
[0065]
如图1和图2所示,转子铁芯12可为空心柱状结构。转子铁芯12可用永磁体制作形成。转子铁芯12可包括内周面、外周面和端面。转子铁芯12的端面可为环形面,且可与转子铁芯12的轴向垂直。其中,转子铁芯12可由多个铁芯段121构成。例如,沿转子铁芯12的轴向,转子铁芯12可分为若干个铁芯段121。在组装转子11时,可将多个铁芯段121依次堆叠设置,或套设在转轴,以形成转子铁芯12。
[0066]
继续参照图1和图2,磁极13的数量可为多个,多个磁极13可沿转子铁芯12的周向均匀设置。转子11的磁极总数可用2p表示。p为极对数,可取大于等于1的正整数。磁极总数例如可为4个、6个、10个、16个、20个、30个、40个或更多个。在此,本技术实施例中不对磁极13的数量做具体的限定。转子11的磁极总数可根据具体电机的性能进行设定。
[0067]
如图2所示,任一磁极13可设于转子铁芯12的外周面。图3为另一种转子的结构示意图。如图3所示,任一磁极13还可设于转子铁芯12的内周面。如图2和图3所示,当磁极13的设于转子铁芯12的外周面或内周面时,可形成表贴式磁极结构。图4为另一种转子的结构示意图。如图4所示,任一磁极13还可穿设在转子铁芯12的内部,形成内置式磁极结构。
[0068]
其中,每个磁极13可包括至少一个沿转子铁芯12的轴向设置的磁体14。参照图2至图4,每个磁极13可包括一个磁体14。在转子铁芯12的径向面内,磁极13可呈一字型排列。
[0069]
图5为一种实施例的转子的端面结构示意图。如图5所示,当每个磁极13包括多个磁体14时,在转子铁芯12的径向面内,多个磁体14形成磁极13可呈双v字型排列。可以理解的是,图2至图5仅为示例性说明,每个磁极13还可设置为他结构,例如v字型或w字型排列结构等。
[0070]
继续参照图1,在本技术一种实施例中,磁极13中的任一磁体14,可自转子铁芯12的一端延伸至另一端。每个磁体14沿转子铁芯12的轴向,可分为多个磁段141。多个磁段141依次首尾连接形成磁体14。其中,如图1所示,任一磁体14的每个磁段141可分别设置在不同的铁芯段121的周向。在装配时,多个铁芯段121依次连接,多个铁芯段121周向的磁段141依次连接形成磁体14。
[0071]
继续参照图1,每个磁体14的多个磁段141中,至少存在两个磁段141沿转子铁芯12的周向错开一定的角度设置。任意两个磁段141之间沿转子铁芯12的周向错位设置形成的错位角为该两个磁段141的斜极角。可以理解的是,任意两相邻的磁段141之间的斜极角可相同也可不同。在每个磁体14中,还可存在两个相邻的磁段141之间直线连接设置,即在定子铁芯的周向不存在错位角。本技术实施例中,任一磁体14的各磁段141之间的最大斜极角θ满足:
[0072][0073]
其中,z为电机定子槽数。2p为转子的磁极总数。z和p均取自正整数。lcm(z,2p)为电机定子槽数和转子的磁极总数的最小公倍数。n为磁段的种类数,且n为大于等于2的正整数,且n小于或等于磁段的段数。
[0074]
参照图1,当磁段141的段数为n时,n段磁段的种类可相同,也可不同,还可部分相同。例如,当n为4时,磁段141的种类可1种,也可为2种,也可为3种,还可为4种。当4段磁段141的尺寸完全相同时,此时,每个磁体14可包括1种类型的磁段141。当4段磁段141中,两两尺寸相同时,此时,每个磁体14可包括2种类型的磁段141。当4段磁段141中,4段磁段141互不相同时,此时,每个磁体14可包括4种类型的磁段141。以上,仅为示例性说明,关于每个磁体14中磁段141的数量和种类可根据实际需要进行设定。
[0075]
另外,在一种可选实施例中,每个磁体14中,任意相邻两个错位设置的磁段141之间的斜极角α满足:
[0076][0077]
图6为本技术一种实施例中的一个磁体的结构示意图。如图6所示,在一种实施例中,每个磁体14为一字型磁体14。一字型磁体14中,沿多个磁段141的排列方向,多个磁段141之间均沿相同的方形错位连接形成一字型结构或类一字型结构。一并参照图1和图6,该实施例中,各磁段141之间的最大斜极角θ为第一个磁段141和最后一个磁段141在转子铁芯12的周向方向的错位角,如1中θ角所示,该θ角满足式(1)。其中,图1中的θ角为图6中两个磁段141沿转子铁芯12的外周面的间距h在转子铁芯12的径向面内对应的圆周角。为方便理解,将图6中的h对应为θ角。其他磁体14中的θ角可做相同理解。
[0078]
另外,该实施例的每个磁体14中,任意相邻两个错位设置的磁段141之间的斜极角α为任意相邻两个错位设置的磁段141在转子铁芯12的周向方向的夹角,如图1和图6中α角所示,该α角满足式(2)。如图1和图6所示,当每个磁体14中包括4个磁段141时,任意两个磁段141之间均可存在斜极角α。其中,图1中的α角为图6中两个磁段141沿转子铁芯12的外周面的间距h在转子铁芯12的径向面内对应的圆周角。为方便理解,将图6中的h对应为α角。其他磁体14中的α角可做相同理解。当所有磁段141均沿同一方向错位设置时,例如均在转子铁芯12的外周面沿顺时针方向错位时,磁体14的最大斜极角θ为所有α角的总和。
[0079]
图7为本技术另一种实施例的转子的结构示意图。图8为本技术另一种实施例的磁体的结构示意图。如图7和图8所示,在本技术另一种实施例中,磁体14可为v字型磁体14。在v字型磁体14中,多个磁段141的连线形成v字型或类v字型。如图8所示,本技术实施例中,每个磁体14可包括4段磁段141,其中,第一个磁段141和第二个磁段141之间沿转子铁芯12的周向错位设置,第二个磁段141和第三个磁段141之间沿转子铁芯12的周向不存在错位角,
两者之间沿转子铁芯12的轴向直线连接设置,第三个磁段141和第四个磁段141之间沿转子铁芯12的周向错位设置。该连接方式中,各磁段141之间的最大斜极角θ可为第一个磁段141和第二个磁段141之间的斜极角α1,也可为第三个磁段141和第四个磁段141时间的斜极角α2,最大斜极角θ为α1和α2中的最大者。
[0080]
可以理解的是,以上仅为示例性说明,当磁段141的数量为更多个且不沿一字型排列时,每个磁体14中,各磁段141之间的最大斜极角,可为任意两个相邻错位设置的磁段141的斜极角的最大者。
[0081]
图9为本技术另一种实施例的转子的结构示意图。图10为本技术另一种实施例的磁体的结构示意图。如图9和图10所示,在本技术另一种实施例中,磁体14可为z字型磁体14。在z字型磁体14中,多个磁段141的连线形成z字型或类z字型。如图10所示,本技术实施例中,每个磁体14可包括4段磁段141,其中,第一个磁段141和第二个磁段141之间在转子铁芯12的周向并沿第一方向错位设置,第二个磁段141和第三个磁段141之间在转子铁芯12的周向并沿第二方向错位设置,第三个磁段141和第四个磁段141之间在转子铁芯12的周向并沿第一方向错位设置。其中,第一方向和第二方向为相反的方向。第一方向若为顺时针方向,则第二方向为逆时针方向。第一方向若为逆时针方向,则第二方向为顺时针方向。
[0082]
该连接方式中,各磁段141之间的最大斜极角θ可为第一个磁段141和第二个磁段141之间的斜极角α1,也可为第二个磁段141和第三个磁段141之间的斜极角α2,也可为第三个磁段141和第四个磁段141时间的斜极角α3,最大斜极角θ为α1、α2和α3中的最大者。
[0083]
图11为本技术另一种实施例的转子的结构示意图。图11实施例的转子,与图9实施例的转子的不同之处在于,各磁体14设于转子铁芯12的内周面。当磁体14设于转子铁芯12的内周面时,可与其设于外周面的结构相同。例如,磁体14的结构可为一字型结构、v字型结构或z字型结构或w字型结构等等。
[0084]
可以理解的是,本技术实施例的各转子中,磁体14可通过标贴方式与转子铁芯12连接,还可通过设置内置式与转子铁芯12连接。当采用内置式与转子铁芯12连接时,转子铁芯12的表面可设置磁体14槽,各磁体14可插设于磁体14槽内,实现与转子铁芯12的连接。当磁体14采用内置式连接方式时,磁体14槽的拓扑结构包括但不限于一字型内置式拓扑结构、v字型内置式拓扑结构或双v型内置式拓扑结构。
[0085]
本技术实施例的转子,在设计斜极角时,通过附加不同种类的磁段对转子的齿槽转矩、转矩脉动和径向电磁力的影响,因此,利用申请实施例的计算方法获得的斜极角,可更准确的计算出最佳斜极角,以降低齿槽转矩、转矩脉动和径向电磁力对噪声的影响。针对分数槽电机,可显著降低径向电磁力对电机噪声的影响,相对于现有的斜极角的设计方式,可将电机的噪声降低70%以上。
[0086]
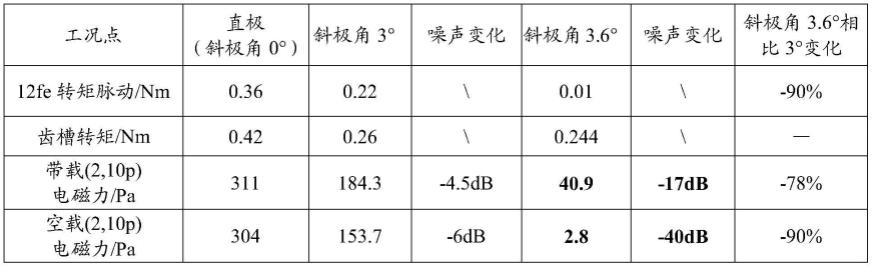
下面将以12s10p电机为例,对本技术实施例的转子的作用做进一步详细说明。
[0087]
以12s10p电机为例,电机定子槽数z为12,转子的磁体总数2p为10,电机的每极每相槽数q为2/5。参照图1,转子11的每个磁体14分为2个磁段141。两个磁段141呈一字型排列。磁段141的种类n为2。利用本技术实施例获得的各磁段141的最大斜极角θ可为3.6
°
。利用传统计算方法获得的磁体14的斜极角为3
°
。仿真预测不同斜极角的电机的噪声,仿真结果列于表1。
[0088]
表1
[0089][0090]
其中,带载(2,10p)电磁力为带载情况下作用在定子上的空间2阶10倍电频率的径向电磁力密度,空载(2,10p)电磁力为空载情况下作用在定子上的空间2阶10倍电频率的径向电磁力密度。
[0091]
如表1中数据,按照本技术实施例的斜极角设置的转子,其相对传统方式直极或3
°
斜极角的转子,转矩脉动显著下降,降低可达90%。电机带载以及空载的(2,10p)电磁力均大幅下降,相应的噪声可显著降低。
[0092]
基于同样的技术构思,本技术实施例提供一种转子组件。该转子组件包括转轴和与转轴连接的转子。转子可为本技术实施例提供的转子。
[0093]
基于同样的技术构思,本技术实施例提供一种电机。该电机包括定子和本技术实施例的转子组件。其中,转子组件中的转子与定子配合设置。其中,当转子的各磁体设于转子铁芯的外周面时,如图1、图7和图9所示实施例的转子11,在组装电机时,定子可套设于转子11的外部。当转子11的各磁体14设于转子铁芯12的内周面时,如图11所示实施例的转子11,在组成电机时,转子11可套设于定子的外部。转子11和定子之间可相对转动。转子11与转轴连接,以利用转轴实现动力输出。
[0094]
作为举例说明,本技术提供的几种实施例的电机,其具体的θ角以及α角的选取范围列于表2。具体电机的参数以及θ角以及α角的数值参见表2。
[0095]
表2
[0096][0097]
表2所示几种实施例的电机,相对传统方式直极转子或斜极转子,转矩脉动显著下降,电机带载以及空载的(2,10p)电磁力均大幅下降,相应的噪声可显著降低。
[0098]
基于同样的技术构思,本技术实施例还提供一种动力总成。该动力总成包括减速器和本技术实施例的电机。电机与减速器传动连接。
[0099]
基于同样的技术构思,本技术实施例还提供一种动力装置。该动力装置包括本技术实施例的动力总成。其中,本技术的动力装置例如包括但不限于电动汽车、电动自行车等等。
[0100]
以上,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉
本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。