1.本发明涉及一种电机控制系统,具体涉及一种电机控制器电流谐波抑制的矢量控制方法。
背景技术:
2.永磁同步电机具有结构紧凑、功率密度高等优点,广泛应用于电动汽车驱动系统,永磁同步电机控制器效率是其关键性能,减小控制器损耗来提高其效率是广泛关注的重点。
3.合理分配永磁同步电机各转速区间的pwm频率,以达到减小控制器开关损耗,提升控制器效率变得尤为重要。由于控制器pwm频率对电机三相电流谐波也有重要影响,电流谐波分量占比大会造成永磁同步电机转矩脉动加剧、温升等不良后果。所以,如何保证电机控制器效率的同时还能对三相电流谐波进行抑制,以达到提升电驱系统的整体性能,是目前所面临的问题。
技术实现要素:
4.本发明提供一种电机控制器电流谐波抑制的矢量控制方法,本发明能对占比较大的谐波分量进行抑制,达到较小永磁同步电机转矩脉动的效果,提升了永磁同步电机性能。
5.解决上述问题的技术方案如下:
6.电机控制器电流谐波抑制的矢量控制方法,包括以下步骤:
7.s1,电机控制器效率试验及电流谐波试验,测试并分析电机在不同转速区间时的pwm频率与电机控制器效率、电流谐波分量的关系;
8.s2,基于电机控制器效率最优的原则进行pwm频率分配处理,基于s1的试验分析结果,合理分配不同转速工况的pwm频率,使电机控制器效率保持最优;
9.s3,进行电流谐波抑制处理,通过电流谐波抑制算法对占比大的谐波分量进行抑制;
10.s4,进行电机矢量控制器设计,针对pwm频率分配及电流谐波抑制算法,将两部分算法集成到电机控制器中。
11.进一步地,步骤s1中,按以下步骤进行电机控制器效率试验及电流谐波试验:
12.s11,根据电机设计参数最高转速,按照固定的转速梯度进行空载试验,记录不同pwm频率时控制器效率及电流谐波占比;
13.s12,在保证控制器效率最大的原则时,同时满足当前电流谐波分量占比不超过规定的阈值,通过试验数据分析并合理选择各转速段的pwm频率;
14.s13,通过自动程序完成电机控制器效率、电流谐波试验及数据筛选工作。
15.进一步地,步骤s2按以下过程执行:
16.s21,通过对当前电机实际转速进行低通滤波,根据以下公式进行计算:
17.n
filter
=a
·
n (1-a)
·nfilter_last
18.上式中,n
filter
为滤波后的电机转速,n为电机当前转速,n
filter_last
为前一周期滤波后的电机转速,a为低通滤波系数;
19.s22,根据试验分析结果,对电机当前转速和pwm频率进行查表处理,即通过对当前电机转速的判断,输出当前转速对应的控制器pwm频率。
20.进一步地,步骤s3按以下过程执行:
21.s31,计算两相旋转坐标系下直交轴电流分量;
22.s32,提取谐波电流;
23.s33,计算直交轴电压谐波分量;
24.s34,低次谐波分量注入补偿。
25.进一步地,s31中按以下过程计算两相旋转坐标系下直交轴电流分量:
26.通过三相电流传感器采集a、b、c三相电流,按照等幅值原则进行clark变换、park变换得到两相旋转坐标系的dq直交轴电流分量id、iq,根据以下公式进行计算:
[0027][0028]
上式中,id、iq为直交轴电流分量,ia、ib、ic为三相电流,θe为转子位置角。
[0029]
进一步地,s32中按以下过程提取谐波电流:
[0030]
电机电流中5、7次谐波分量占比大,考虑5、7次谐波分量的抑制,电机三相电流中含有谐波成分,在dq两相同步旋转坐标系中,dq轴电流可表示为:
[0031][0032]
上式中,i
d1
、i
q1
分别为d轴和q轴的基波电流,i
d5
、i
q5
分别为d轴和q轴的5次谐波电流,i
d7
、i
q7
分别为d轴和q轴的7次谐波电流,θ5、θ7分别为5次和7次谐波电流的初始相位角,ω为电流角速度。通过低通滤波实现d轴和q轴的谐波分量i
d5
、i
q5
、i
d7
、i
q7
。
[0033]
进一步地,s33中按以下过程计算直交轴电压谐波分量:
[0034]
由s32中得到的直交轴上5次和7次电流谐波分量,通过抗饱和pi控制器,再进行前馈处理计算得到直交轴5次和7次电压谐波分量u
d5
、u
q5
、u
d7
、u
q7
,根据稳态定子电压方程进行计算:
[0035][0036][0037]
上式中,u
d5
、u
q5
、u
d7
、u
q7
分别为直交轴5次和7次电压谐波分量,r为定子电阻,ld、lq为dq轴电感分量,ωe为电角速度,ψf为永磁体磁链,稳态时,可忽略该部分。
[0038]
进一步地,s34中按以下过程进行低次谐波分量注入补偿:
[0039][0040]
通过s33计算得到直交轴5次和7次电压谐波分量u
d5
、u
q5
、u
d7
、u
q7
,将直交轴电压谐波分量补偿到直交轴参考电压分量u
dref
、u
qref
上即可得到进行谐波抑制后的直交轴参考电压分量根据上述公式计算。
[0041]
进一步地,所述电机为永磁同步电机。
[0042]
本发明的有益技术效果为:
[0043]
1、本发明通过电机控制器空载效率试验,提前识别控制器效率与pwm频率、电流谐波占比的关系,合理分配在不同转速区间的pwm频率,保证电机控制器效率最优,该方法适用于不同型号的永磁同步电机控制器效率及电流谐波试验。
[0044]
2、本发明提供一种控制器效率及电流谐波试验、数据筛选的方法,可进行自动工况和数据筛选,直接得到对应转速区间的pwm频率,减小工程师的工作量。
[0045]
3、本发明针提供一种矢量控制方法对电机三相电流低次谐波分量进行抑制,改善永磁同步电机转矩脉动,提升了电机性能。
附图说明
[0046]
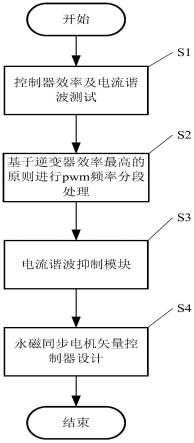
图1为基于控制器效率最优及电流谐波抑制的矢量控制方法流程图。
[0047]
图2为控制器效率及电流谐波试验流程图。
[0048]
图3为控制器效率、谐波试验及数据筛选程序流程图。
[0049]
图4为pwm频率分配策略流程图。
[0050]
图5为电流谐波抑制算法流程图。
[0051]
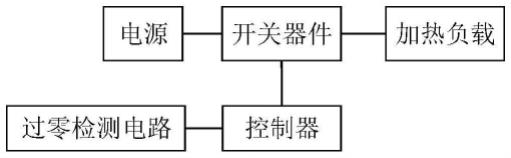
图6为永磁同步电机矢量控制原理图。
具体实施方式
[0052]
为使本发明的目的、技术方案和优点更加清楚,结合本发明实施例中的附图,对本发明实施例中的技术方案进行更加详细的描述。所描述的实施例是本发明的一部分实施例,而非全部的实施例。通过参考附图描述的实施例为示例性的,旨在用于解释本发明,而不能简单地理解为对本发明的限制。基于本发明的实施例,本领域技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0053]
下面结合附图对本发明进行详细说明。
[0054]
如图1所示,本发明的电机控制器电流谐波抑制的矢量控制方法,所述电机为永磁同步电机,包括以下步骤:
[0055]
s1,电机控制器效率试验及电流谐波试验,测试并分析电机在不同转速区间时的pwm频率与电机控制器效率、电流谐波分量的关系。
[0056]
步骤s1中,按以下步骤进行电机控制器效率试验及电流谐波试验。
[0057]
s11,根据电机设计参数最高转速,按照固定的转速梯度进行空载试验,试验流程图如图2所示,记录不同pwm频率时控制器效率及电流谐波占比。
[0058]
s12,在保证控制器效率最大的原则时,同时满足当前电流谐波分量占比不超过规定的阈值,通过试验数据分析并合理选择各转速段的pwm频率。
[0059]
s13,通过自动程序完成电机控制器效率、电流谐波试验及数据筛选工作,其自动程序流程图如图3所示。
[0060]
首先设置pwm频率的范围,使电机按照预设的一低转速运行,同时改变pwm频率大小并采集控制器效率及电流谐波占比。重复以上工作,直至完成所有转速区间工况的测试。按照控制器效率从大到小的原则,对测试数据进行排序,进入数据筛选流程。满足最大效率的数据点,如果谐波含量小于阈值则此数据点为该转速理想结果;若谐波含量大于阈值,则依次筛选其他数据点。直到完成所有转速区间的数据筛选,最终输出结果,即各转速对应的合理pwm频率值。
[0061]
s2,基于电机控制器效率最优的原则进行pwm频率分配处理,基于s1的试验分析结果,合理分配不同转速工况的pwm频率,使电机控制器效率保持最优;该策略流程图如图4所示。
[0062]
步骤s2按以下过程执行:
[0063]
s21,通过对当前电机实际转速进行低通滤波,根据以下公式进行计算:
[0064]nfilter
=a
·
n (1-a)
·nfilter_last
[0065]
上式中,n
filter
为滤波后的电机转速,n为电机当前转速,n
filter_last
为前一周期滤波后的电机转速,a为低通滤波系数;
[0066]
s22,根据试验分析结果,对电机当前转速和pwm频率进行查表处理,即通过对当前电机转速的判断,输出当前转速对应的控制器pwm频率。
[0067]
s3,进行电流谐波抑制处理,通过电流谐波抑制算法对占比大的谐波分量进行抑制;
[0068]
步骤s3按以下过程执行:
[0069]
s31,计算两相旋转坐标系下直交轴电流分量。s31中按以下过程计算两相旋转坐标系下直交轴电流分量:
[0070]
通过三相电流传感器采集a、b、c三相电流,按照等幅值原则进行clark变换、park变换得到两相旋转坐标系的dq直交轴电流分量id、iq,根据以下公式进行计算:
[0071][0072]
上式中,id、iq为直交轴电流分量,ia、ib、ic为三相电流,θe为转子位置角。
[0073]
s32,提取谐波电流。按以下过程提取谐波电流:
[0074]
电机电流中5、7次谐波分量占比较大,主要考虑5、7次谐波分量的抑制。因为电机三相电流中含有谐波成分,在dq两相同步旋转坐标系中,dq轴电流可表示为:
[0075]
[0076]
上式中,i
d1
、i
q1
分别为d轴和q轴的基波电流,i
d5
、i
q5
分别为d轴和q轴的5次谐波电流,i
d7
、i
q7
分别为d轴和q轴的7次谐波电流,θ5、θ7分别为5次和7次谐波电流的初始相位角,ω为电流角速度。通过低通滤波实现d轴和q轴的谐波分量i
d5
、i
q5
、i
d7
、i
q7
。
[0077]
s33,计算直交轴电压谐波分量。按以下过程计算直交轴电压谐波分量:
[0078]
由s32中得到的直交轴上5次和7次电流谐波分量,通过抗饱和pi控制器,再进行前馈处理计算得到直交轴5次和7次电压谐波分量u
d5
、u
q5
、u
d7
、u
q7
,根据稳态定子电压方程进行计算:
[0079][0080][0081]
上式中,u
d5
、u
q5
、u
d7
、u
q7
分别为直交轴5次和7次电压谐波分量,r为定子电阻,ld、lq为dq轴电感分量,ωe为电角速度,ψf为永磁体磁链,稳态时,可忽略该部分。
[0082]
s34,低次谐波分量注入补偿。按以下过程进行低次谐波分量注入补偿:
[0083][0084]
通过s33计算得到直交轴5次和7次电压谐波分量u
d5
、u
q5
、u
d7
、u
q7
,将直交轴电压谐波分量补偿到直交轴参考电压分量u
dref
、u
qref
上即可得到进行谐波抑制后的直交轴参考电压分量根据上述公式计算。
[0085]
s4,进行电机矢量控制器设计,针对pwm频率分配及电流谐波抑制算法,将两部分算法集成到电机控制器中。
[0086]
通过上述可知,本发明通过分析空载工况下,不同电机转速区间电机控制器效率与pwm频率与电流谐波分量占比关系,合理选取不同转速区间pwm频率,保证电流谐波含量不超过预设的阈值情况下电机控制器效率最优。同时针对占比较大的谐波分量进行抑制,达到较小永磁同步电机转矩脉动的效果,提升了永磁同步电机性能。
[0087]
本发明的矢量控制方法使电机控制器效率最优、抑制电机三相电流谐波分量,在永磁同步电机运行过程中,保证较高的电机控制器效率的同时,也改善了电机三相电流质量,提升了电驱系统的整体性能。
[0088]
本发明的方法自动进行效率、电流谐波试验以及数据筛选,根据不同规格参数的产品,结合预设的参数阈值,可得到输出结果,极大减少测试及分析的工作量。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。