技术特征:
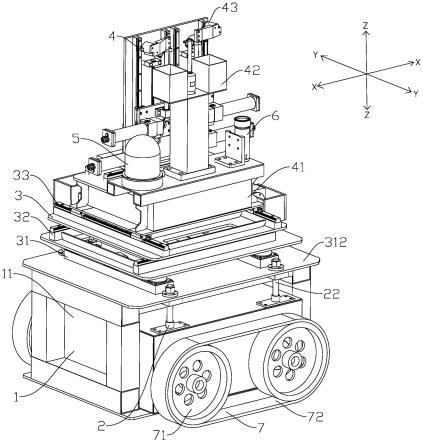
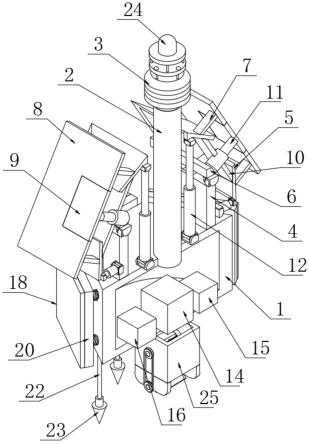
1.一种核电厂定位销水下收集机器人,其特征在于,包括车体(1)、与所述车体(1)连接的升降机构(2)、设于所述升降机构(2)上端的旋转平台机构(3)以及设于所述旋转平台机构(3)上端的执行机构(4);所述升降机构用于带动所述旋转平台机构(3)以及所述执行机构(4)进行上下移动;所述旋转平台机构(3)用于带动所述执行机构(4)进行x轴方向移动、y轴方向移动或者旋转运动;所述执行机构(4)包括与所述旋转平台机构(3)连接的固定座(41)、设于所述固定座(41)上的顶升收集组件(42)以及用于夹取定位销并将所述定位销投放至所述顶升收集组件(42)的夹持组件(43)。2.根据权利要求1所述的核电厂定位销水下收集机器人,其特征在于,所述夹持组件(43)包括第一滑轨(431)、第一定位板(432)、第二滑轨(433)、第二定位板(434)以及夹爪组件(436);所述第一定位板(432)通过所述第一滑轨(431)与所述固定座(41)可移动连接;所述第二定位板(434)通过所述第二滑轨(433)与所述第一定位板(432)可移动连接;所述夹爪组件(436)设于所述第二定位板(434)上用于夹取定位销。3.根据权利要求2所述的核电厂定位销水下收集机器人,其特征在于,所述夹爪组件(436)包括定位座(4361)、转动杆(4362)、过渡座(4363)、夹爪(4364)以及转杆驱动装置(4365);所述转动杆(4362)通过安装于所述定位座(4361)与所述第二定位板(434)连接;所述夹爪(4364)通过所述过渡座(4363)与所述转动杆(4362)连接;所述转杆驱动装置(4365)设于所述第二定位板(434)上通过锥齿轮与所述转动杆(4362)传动连接从而驱使所述夹爪(4364)旋转。4.根据权利要求1所述的核电厂定位销水下收集机器人,其特征在于,所述顶升收集组件(42)包括驱动缸(421)、连接板(422)、顶杆(423)以及收集盒(424);所述驱动缸(421)设于所述固定座(41)的上端;所述顶杆(423)与所述驱动缸(421)可移动连接;所述收集盒(424)通过连接板(422)设于所述驱动缸(421)的上端面。5.根据权利要求1所述的核电厂定位销水下收集机器人,其特征在于,所述固定座(41)上还设有用于对整体环境进行观察的全景相机(5);所述全景相机(5)包括第一云台、与所述第一云台连接的第二云台以及设于所述第二云台上的相机本体;所述第一云台用于带动所述相机本体进行360度旋转;所述第二云台用于带动所述相机本体进行上仰和下俯。6.根据权利要求1所述的核电厂定位销水下收集机器人,其特征在于,所述固定座(41)上还设有用于对定位销进行定位的定位相机(6)。7.根据权利要求1所述的核电厂定位销水下收集机器人,其特征在于,所述车体(1)为一体式密封箱体,其包括若干车板(11),若干所述车板(11)通过焊接连接形成所述车体(1)。8.根据权利要求1所述的核电厂定位销水下收集机器人,其特征在于,所述车体(1)中
设有控制组件,所述控制组件包括驱动电机、与所述驱动电机连接的减速机、控制元件以及用于获取所述核电厂定位销水下收集机器人工作状况的下位机。9.根据权利要求8所述的核电厂定位销水下收集机器人,其特征在于,还包括行走机构(7),所述行走机构(7)包括与所述减速机连接的行走轮(71)以及与所述行走轮(71)连接的履带(72);所述减速机通过穿设于所述车体(1)的输出轴与所述行走轮(71)连接,从而驱动所述行走轮(71)带动所述履带(72)移动。10.根据权利要求1所述的核电厂定位销水下收集机器人,其特征在于,所述升降机构(2)包括设于所述车体(1)和所述旋转平台机构(3)之间的若干导柱(22),若干所述导柱(22)外周均套设有弹簧。11.根据权利要求10所述的核电厂定位销水下收集机器人,其特征在于,所述旋转平台机构(3)包括旋转层组件(31)、设于所述旋转层组件(31)上的x移动层组件(32)以及设于所述x移动层组件(32)上的y移动层组件(33)。12.根据权利要求11所述的核电厂定位销水下收集机器人,其特征在于,所述旋转层组件(31)包括与若干所述导柱(22)连接的第一底板(312),设于所述第一底板(312)上的旋转座以及设于所述第一底板(312)和所述x移动层组件(32)之间的支撑座(313)。13.根据权利要求12所述的核电厂定位销水下收集机器人,其特征在于,所述x移动层组件(32)包括与所述旋转座可旋转连接的第二底板(321)、设于所述第二底板(321)上的第三滑轨(322)、设于所述第二底板(321)上的第一传动件(324)以及与所述第一传动件(324)传动连接的第一传动装置(325)。14.根据权利要求13所述的核电厂定位销水下收集机器人,其特征在于,所述y移动层组件(33)包括与所述第三滑轨(322)连接的第三底板(331)、设于所述第三底板(331)上的第四滑轨(332),设于所述第三底板(331)上的第二传动件(334)以及与所述第二传动件(334)传动连接的第二传动装置(335);所述第三滑轨(322)沿x轴方向设置,所述第四滑轨(332)沿y轴方向设置。
技术总结
本发明公开一种核电厂定位销水下收集机器人,其包括车体、与车体连接的升降机构、设于升降机构上端的旋转平台机构以及设于旋转平台机构上端的执行机构,该升降机构用于带动旋转平台机构以及执行机构进行上下移动,该旋转平台机构用于带动执行机构进行X轴方向移动、Y轴方向移动或者旋转运动,该执行机构包括与旋转平台机构连接的固定座、设于固定座上的顶升收集组件以及用于夹取定位销并将定位销投放至顶升收集组件的夹持组件。该核电厂定位销水下收集机器人可调整夹持组件的位置,该夹持组件可将定位销上部残留部分取出并进行收集,操作过程中不需要工作人员进入水下,提高了作业效率,且可防止工作人员在检修的过程中受到辐射的影响。射的影响。射的影响。
技术研发人员:郑传栋 周国丰 张志坚 刘刚 余冰 袁野 杜佳 吴凤岐 吴玉 陈嘉杰 张美玲 何之
受保护的技术使用者:中国广核集团有限公司 中国广核电力股份有限公司
技术研发日:2022.10.31
技术公布日:2023/1/31
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。