技术特征:
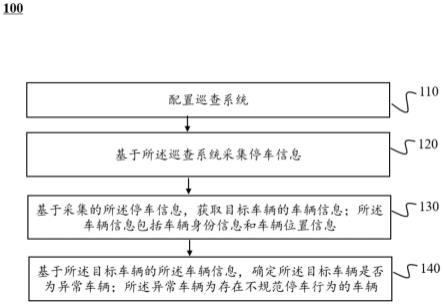
1.一种智能识别不规范停车的巡查方法,其特征在于,包括:配置巡查系统;基于所述巡查系统采集停车信息;基于采集的所述停车信息,获取目标车辆的车辆信息;所述车辆信息包括车辆身份信息和车辆位置信息;基于所述目标车辆的所述车辆信息,确定所述目标车辆是否为异常车辆;所述异常车辆为存在不规范停车行为的车辆。2.根据权利要求1所述的智能识别不规范停车的巡查方法,其特征在于,所述巡查系统包括:激光测距雷达、三维电子罗盘、移动高精度定位终端、车牌识别相机。3.根据权利要求2所述的智能识别不规范停车的巡查方法,其特征在于,所述配置巡查系统包括:将所述激光测距雷达、所述三维电子罗盘、所述移动高精度定位终端、所述车牌识别相机统一安装于移动采集车中;其中,所述激光测距雷达与所述车牌识别相机的安装位置需满足二者采集面完全重叠,且所述车牌识别相机是采集中心点与所述激光测距雷达的终端中心点属于同一位置。4.根据权利要求3所述的智能识别不规范停车的巡查方法,其特征在于,所述车牌识别相机包括安装于所述移动采集车前端的前置车牌识别相机、安装于所述移动采集车后端的后置车牌识别相机;所述激光测距雷达包括安装于所述移动采集车前端的前置激光测距雷达、安装于所述移动采集车后端的后置激光测距雷达;基于所述巡查系统采集停车信息包括:所述巡查系统基于接受的不同采集指令,执行所述采集指令对应的采集动作。5.根据权利要求4所述的智能识别不规范停车的巡查方法,其特征在于,所述采集指令包括:开始采集指令、新泊位连续采集指令、结束采集指令中至少一种;所述开始采集指令对应的所述采集动作包括:基所述于前置车牌识别相机及前置激光测距雷达按照预设周期进行周期性预设泊位位置的停车信息采集;所述新泊位连续采集指令对应的所述采集动作包括:基于所述前置车牌识别相机及所述前置激光测距雷达按照所述预设周期进行周期性预设泊位位置的停车信息采集;基于所述后置车牌识别相机及所述后置激光测距雷达按照所述预设周期进行周期性预设泊位位置的停车信息采集;所述结束采集指令对应的所述采集动作包括:基于所述后置车牌识别相机及所述后置激光测距雷达按照所述预设周期进行周期性预设泊位位置的停车信息采集。6.根据权利要求5所述的智能识别不规范停车的巡查方法,其特征在于,所述基于采集的所述停车信息,获取目标车辆的车辆信息包括:基于所述停车信息判断是否存在所述目标车辆;响应于存在;基于所述车牌识别相机采集的所述停车信息,获取目标车辆的所述车辆身份信息;响应于不存在,将所述车牌识别相机采集的所述停车信息存储至相应泊位对应的预设存储表内。
7.根据权利要求6所述的智能识别不规范停车的巡查方法,其特征在于,所述获取目标车辆的所述车辆身份信息包括:对周期获取的所述停车信息中,基于至少两轮所述停车信息确定的所述车辆身份信息进行比对,若一致,则所述车辆身份信息的可信度为第一预设值,且所述车辆身份信息为目标身份信息,所述目标身份信息为所述目标车辆对应的车辆身份信息;若不一致,则基于各个车辆身份信息的出现次数,确定所述出现次数最多的所述车辆身份信息为候选身份信息;判断所述候选身份信息与上一轮巡查结果确定的所述目标身份信息是否一致,若一致,则所述候选身份信息为所述目标身份信息,且所述目标身份信息的可信度为第二预设值;若不一致,则所述候选身份信息为所述目标身份信息,且所述目标身份信息的可信度与所述候选身份信息的出现次数正相关;其中,所述第一预设值大于所述第二预设值。8.根据权利要求5所述的智能识别不规范停车的巡查方法,其特征在于,所述基于所述巡查系统采集停车信息还包括:基于所述三维电子罗盘实时获取所述移动采集车的行驶方向;基于所述激光测距雷达实时获取所述移动采集车与目标泊位或目标车辆的距离信息;所述基于采集的所述停车信息,获取目标车辆的车辆信息包括:基于所述激光测距雷达采集的所述距离信息、所述三维电子罗盘采集的所述行驶方向、所述移动采集车的实时位置坐标信息、以及所述激光测距雷达与所述行驶方向的预设角度,确定所述目标泊位或目标车辆的地理位置信息。9.根据权利要求8所述的智能识别不规范停车的巡查方法,其特征在于,所述方法还包括:重复多次基于所述巡查系统采集停车信息,以获得多个所述停车信息,进而确定多个所述目标泊位或目标车辆的地理位置信息;将多个所述目标泊位或目标车辆的地理位置信息汇集在预设数据集合内。10.根据权利要求9所述的智能识别不规范停车的巡查方法,其特征在于,所述基于所述目标车辆的所述车辆信息,确定所述目标车辆是否为异常车辆包括:基于所述目标车辆的所述身份信息,从所述预设数据集合读取所述目标车辆的多个地理位置信息;基于所述多个地理位置信息,确定所述目标车辆的多个边界变化位置信息;基于所述预存的目标泊位相关属性,确定所述目标泊位的位置范围集合;逐一将所述多个地理位置信息与所述目标泊位的位置范围集合进行对比,判断目标车辆是否停泊于所述目标泊位的位置范围集合内;基于判断结果确定所述目标车辆是否为异常车辆。
技术总结
本发明提供了一种智能识别不规范停车的巡查方法,包括:配置巡查系统;基于所述巡查系统采集停车信息;基于采集的所述停车信息,获取目标车辆的车辆信息;所述车辆信息包括车辆身份信息和车辆位置信息;基于所述目标车辆的所述车辆信息,确定所述目标车辆是否为异常车辆;所述异常车辆为存在不规范停车行为的车辆。本方案可以实现让占道停车快速巡查采集系统在实际使用过程中,具备不按规范停车智能识别能力,可以充分发挥快速移动采集识别系统带来的方便、经济、适应性高等优势,着实降低占道收费运营因停车证据瑕疵带来的投诉风险;有效提升交通秩序管理部门、城市执法管理单位违停抓拍能力与效率。抓拍能力与效率。抓拍能力与效率。
技术研发人员:冉霖
受保护的技术使用者:四川启睿克科技有限公司
技术研发日:2022.10.20
技术公布日:2023/1/31
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。