1.本发明涉及测控应用技术领域,具体涉及一种霍尔开关的高速机械标定装置。
背景技术:
2.目前市面上对车用速度传感器(齿轮传感器/霍尔开关)的测量通常采用测试平台进行,该测试平台多以旋转电磁场进行近似等效替代,但旋转电磁场的变化更接近于正弦波形,与实际的齿轮齿形有所不同,尤其对具有较大占空比需求的传感器进行检测时旋转电磁场无法达到较佳的检测效果。
3.现有常规的齿轮传感器检测装置,通过在检测装置内设置转动的齿轮并通过待测传感器对转动的齿轮进行传感测试,以确定待测传感器性能,一般只能进行中速或低速的检测,转动的齿轮上限转速有限,但多数霍尔开关的极限性能测试,以霍尼韦尔sndh-t4p族谱为例,开关频率范围已经达到15khz(1万5千次/秒),常规的齿轮传感器检测装置无法对该类霍尔开关进行极限性能测试。
4.鉴于上述缺陷,本发明创作者经过长时间的研究和实践终于获得了本发明。
技术实现要素:
5.本发明为解决现有传感器检测装置的检测需求无法满足高占空比和高极限频率的问题,提供了一种霍尔开关的高速机械标定装置。
6.为了实现上述目的,本发明采用了如下技术方案:
7.一种霍尔开关的高速机械标定装置,包括电机、主动带轮、从动带轮、被测基准齿轮、传感器安装座和处理器,所述电机的输出轴与所述主动带轮固定连接,所述被测基准齿轮通过连接轴与所述从动带轮固定连接,所述从动带轮和所述被测基准齿轮同轴设置,所述主动带轮和所述从动带轮通过皮带传动连接,待测传感器通过所述传感器安装座对应所述被测基准齿轮固定设置,所述处理器与所述电机、所述待测传感器数据连接。
8.较佳的,所述被测基准齿轮外部罩设有护罩,所述传感器安装座固定在所述护罩上。
9.较佳的,所述电机上设置有步进驱动器,电源通过所述步进驱动器与所述电机连接,所述处理器通过所述步进驱动器与所述电机连接。
10.较佳的,所述主动带轮和所述从动带轮的转速比不小于1:3,所述电机的转速不小于3000r/min。
11.较佳的,所述被测基准齿轮包括轮环、中心轴套和加强连杆,所述轮环和所述中心轴套同轴设置,所述加强连杆径向设置,且所述加强连杆的两端分别固定连接所述轮环的内圆面和所述中心轴套的外圆面,所述中心轴套固定套设在所述连接轴上。
12.较佳的,所述轮环的外圆面上环形均布有若干轮齿,所述轮齿设置为等腰梯形,相邻所述轮齿之间设置有齿槽,所述齿槽横截面设置为等腰梯形,所述齿槽的槽底宽度和所述轮齿的齿顶宽度一致。
13.较佳的,所述霍尔开关的高速机械标定装置所能满足的实验测试频率大于所述待测传感器的极限测试频率,所述实验测试频率f的计算公式为:
[0014][0015]
其中,n为所述齿轮的齿数;ni为所述电机的转速,单位为r/min;z为所述主动带轮和所述从动带轮的转速比。
[0016]
较佳的,所述齿槽的槽底宽度和所述轮齿的齿顶宽度的尺寸均设置为2mm,所述齿槽的槽深尺寸设置为4mm~8mm。
[0017]
较佳的,所述霍尔开关的高速机械标定装置还设置有外壳,所述外壳竖直设置,所述主动带轮和所述从动带轮均设置在所述外壳内,所述电机固定设置在所述外壳的下部,所述护罩固定设置在所述外壳的上部,所述外壳的下端固定设置有底座。
[0018]
较佳的,所述霍尔开关的高速机械标定装置还包括基准传感器,所述基准传感器通过所述传感器安装座对应所述被测基准齿轮固定设置,所述基准传感器与所述处理器数据连接。
[0019]
与现有技术比较本发明的有益效果在于:1,本发明较传统旋转电磁场的计量设备还原了物理齿轮转动的应用场合同时又大幅度简化了架构,使系统便于部署,又几何级地降低了造价,目前国内的齿轮传感器检测装置,其极限测试频率一般仅能达到4khz,本发明能够达到19khz的极限速度,大大提高了传感器性能的检测上限,同时本发明立式摆放的方式也可适配高低温试验箱进行其他极限性能测试;2,本发明还可同时设置若干路不同型号的霍尔开关以及光电开关用于实验对照和二次仪表/计算机labview上位机连接,以进行霍尔开关或光电开关的型号性能比对。
附图说明
[0020]
图1为所述霍尔开关的高速机械标定装置的结构正视图;
[0021]
图2为所述霍尔开关的高速机械标定装置的侧视剖面图;
[0022]
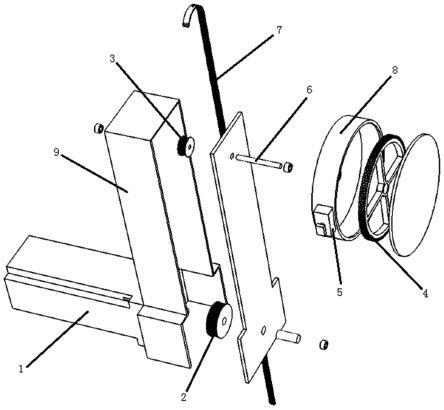
图3为所述霍尔开关的高速机械标定装置的立体爆炸图;
[0023]
图4为所述霍尔开关的高速机械标定装置的连接关系图;
[0024]
图5为所述被测基准齿轮的结构视图;
[0025]
图6为所述被测基准齿轮的轮齿结构视图;
[0026]
图7为所述基准传感器的立体爆炸图;
[0027]
图8为所述基准传感器的电路连接图。
[0028]
图中数字表示:
[0029]
1-电机;2-主动带轮;3-从动带轮;4-被测基准齿轮;5-传感器安装座;6-连接轴;7-皮带;8-护罩;9-外壳;10-底座;41-轮环;42-中心轴套;43-加强连杆;44-轮齿;45-齿槽;51-骨架;52-封装壳体;53-电路板;54-永磁体;55-霍尔ic。
具体实施方式
[0030]
以下结合附图,对本发明上述的和另外的技术特征和优点作更详细的说明。
[0031]
实施例一
[0032]
如图1至图4所示,图1为所述霍尔开关的高速机械标定装置的结构正视图;图2为所述霍尔开关的高速机械标定装置的侧视剖面图;图3为所述霍尔开关的高速机械标定装置的立体爆炸图;图4为所述霍尔开关的高速机械标定装置的连接关系图。
[0033]
本发明所述霍尔开关的高速机械标定装置包括电机1、主动带轮2、从动带轮3、被测基准齿轮4、传感器安装座5和处理器,所述电机1的输出轴与所述主动带轮2固定连接,所述被测基准齿轮4通过连接轴6与所述从动带轮3固定连接,所述从动带轮3和所述被测基准齿轮4同轴设置,所述主动带轮2和所述从动带轮3通过皮带7传动连接,待测传感器通过所述传感器安装座5对应所述被测基准齿轮4固定设置,所述处理器与所述电机1、所述待测传感器数据连接。
[0034]
较佳的,所述被测基准齿轮4外部罩设有护罩8,所述传感器安装座5固定在所述护罩8上。
[0035]
较佳的,所述电机1上设置有步进驱动器,电源通过所述步进驱动器与所述电机1连接,以通过所述步进驱动器控制所述电机1的转动速度,所述处理器通过所述步进驱动器与所述电机1连接,通过所述处理器对所述步进驱动器发送控制信号,以控制和读取所述电机1的输出转速。
[0036]
所述电机1和所述步进驱动器采用无刷电机以及其伺服器,所述伺服器通过串口与所述处理器通信,因无刷电机1伺服及其相位测量均位一体实现,在调速/调相同时可以读取电机1运行状态。
[0037]
较佳的,所述主动带轮2和所述从动带轮3的转速比不小于1:3,在本实施例中,所述主动带轮2选择72齿,所述从动带轮324齿,因而转速比被固定在1:3;所述电机1的转速标称上限为3000r/min,此时所述从动带轮3可实现的转速上限为9000r/min,从而保证所述被测基准齿轮4具有较大转速,以实现对19khz极限测试频率的传感器检测。
[0038]
如图5所示,图5为所述被测基准齿轮的结构视图;较佳的,所述被测基准齿轮4包括轮环41、中心轴套42和加强连杆43,所述轮环41和所述中心轴套42同轴设置,所述加强连杆43径向设置,且所述加强连杆43的两端分别固定连接所述轮环41的内圆面和所述中心轴套42的外圆面,所述中心轴套42固定套设在所述连接轴6上。通过所述被测基准齿轮4的结构设置,在保证所述被测基准齿轮4齿数和齿形尺寸的前提下,极大的降低所述被测基准齿轮4的整体重量,从而减少带动所述被测基准齿轮4的所需转矩,可进一步提高所述被测基准齿轮4所能达到的最大转速。
[0039]
如图6所示,图6为所述被测基准齿轮的轮齿结构视图;所述轮环41的外圆面上环形均布有若干轮齿44,为保证对具有较大占空比需求的传感器进行检测,所述轮齿44横截面设置为等腰梯形,相邻所述轮齿44之间设置有齿槽45,所述齿槽45横截面设置为等腰梯形,所述齿槽45的槽底宽度和所述轮齿44的齿顶宽度一致。
[0040]
由于本发明所述被测基准齿轮4不同于用于传动的齿轮连续啮合线的机用齿轮,该齿轮不存在啮合线扫描形成的啮合面,因而用机床较难加工,因此采用了线切割多片叠片铆接的方式进行加工个组装。
[0041]
所述被测基准齿轮4的轮齿44数量基于所述电机1所能输出的转速以及所要检测的极限测试频率获得。
[0042]
实验测试频率f的计算公式为:
[0043][0044]
其中,n为所述齿轮的齿数;ni为所述电机的转速,单位为r/min;z为所述主动带轮和所述从动带轮的转速比。
[0045]
基于所述电机1的最大转速以及固定的所述传速比,通过设置合适的所述齿轮的齿数,使所述实验测试频率f的最大值大于所要检测的极限测试频率,从而通过调节所述电机1的转速,完成对所述待测传感器的极限测试频率检测。
[0046]
一般的,基于上述转速比1:3,从动带轮3转速上限9000r/min的情况,所述齿槽45横截面的槽底宽度b和所述轮齿44横截面的齿顶宽度a的尺寸均设置为2mm,所述齿槽45的槽深尺寸c设置为4mm~8mm,可满足占空比为50%、极限测试频率为19khz的传感器检测。
[0047]
在本实施例中,所述处理器控制并读取电机1转速,并基于所述主动带轮2和所述从动带轮3之间的传动比以及所述被测基准齿轮4的具体尺寸参数进行数据处理,可转化出所述被测基准齿轮4对所述待测传感器提供的基准信号波形图,再通过与所述待测传感器检测出的实际信号波形图做对比,从而可实现对所述待测传感器的性能检测。
[0048]
通过对所述实际信号波形图的分析计算占空比,即(方波的高电平时间)/(高电平时间 低电平时间)*100%为占空比,作为在图形学上校验齿轮的实际占空比。
[0049]
较佳的,所述霍尔开关的高速机械标定装置还设置有外壳9,所述外壳9竖直设置,所述主动带轮2和所述从动带轮3均设置在所述外壳9内,所述电机1固定设置在所述外壳9的下部,所述护罩8固定设置在所述外壳9的上部,所述外壳9的下端固定设置有底座10,通过所述底座10可实现所述霍尔开关的高速机械标定装置的立式摆放,从而可将所述护罩8放置于高低温试验箱以进行其他极限性能测试。
[0050]
本发明较传统旋转电磁场的计量设备还原了物理齿轮转动的应用场合同时又大幅度简化了架构,使系统便于部署,又几何级地降低了造价,目前国内的齿轮传感器检测装置,其极限测试频率一般仅能达到4khz,通过本发明的结构设置能够达到19khz的极限速度,大大提高了传感器性能的检测上限。
[0051]
实施例二
[0052]
所述霍尔开关的高速机械标定装置还包括基准传感器,所述基准传感器通过所述传感器安装座5对应所述被测基准齿轮4固定设置,所述基准传感器与所述处理器数据连接,通过所述基准传感器和所述待测传感器对所述被测基准齿轮4同时进行信号检测,从而同时在所述处理器内形成基准信号波形图和实际信号波形图,通过实时比对实现对所述待测传感器的性能检测。
[0053]
所述基准传感器以及所述被测传感器均为正交输出的前提下可选择四通道示波器进行波形图的观测比对。所述基准传感器和所述被测传感器的检测端面与所述被测基准齿轮4的齿顶间距0.5mm~2mm。
[0054]
如图7所示,图7为所述基准传感器的立体爆炸图;所述基准传感器包括包括骨架51,所述骨架51的两端分别连接所述传感器安装座5和封装壳体52,所述骨架51中设置有电路板53、永磁体54及霍尔ic55,所述霍尔ic55和所述永磁体54对应设置,所述霍尔ic55和所述电路板53连接。
[0055]
所述霍尔ic55设置有a相霍尔ic和b相霍尔ic,a相霍尔ic和b相霍尔ic为正交双通
路,a相霍尔ic和b相霍尔ic均设置有两个霍尔单元,通过磁体的反向偏置,可以在不同点感应含铁磁体(如齿轮)的磁感线,所产生的两个差分内部模拟电压,在霍尔ic55内部预处理以便于后续器件的精确采集,从而实现对所述被测基准齿轮4的转向判断。
[0056]
如图8所示,图8为所述基准传感器的电路连接图;所述霍尔ic55包括十字交叉性的霍尔元件,所述霍尔元件的输出分别连接两个运算放大器,每个所述运算放大器分别依次连接滤波器、施密特触发器,所述施密特触发器输出连接到所述电路板53的驱动门电路。
[0057]
较佳的,a相霍尔ic和b相霍尔ic两路霍尔单元的几何中心相距1mm(50
±
10%
×
2mm=0.8~1.2mm),有利于内部电路评估运动方向,并在计数信号的每个边沿(上升和下降)更新方向输出。
[0058]
所述基准传感器中的每个独立通道,器件通过测量磁场强度来检测永磁体54结构和运动位置。对于运动和位置变化的被测磁靶形成的磁通量(几何尺寸上决定了a b通道输出的先后顺序),在每个通道中由两个霍尔单元测量,从时序的意义上去理解这种特殊设计使得ic在工作气隙范围内具备极佳的对径向振动的抗干扰性,又通过对共模信号的检测,利用芯片滤波环节的不同频带参数消除了系统稳态磁场和系统失调,将不需要的失调信号在频域中与磁场电压分离,随后的解调将磁场电压恢复至基带,同时直流失调被调制成为高频信号。磁场电压可以通过后续的低通滤波器,而经调制的失调电压则被抑制,使得具备极强的抗干扰能力。
[0059]
以上所述仅为本发明的较佳实施例,对本发明而言仅仅是说明性的,而非限制性的。本专业技术人员理解,在本发明权利要求所限定的精神和范围内可对其进行许多改变,修改,甚至等效,但都将落入本发明的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。