1.本发明属于风电领域,具体涉及一种提取风力机电机转速的方法及系统。
背景技术:
2.近年来,随着国家“双碳”政策的提出与执行,风力发电行业得到迅猛发展。振动监测设备作为保障风电机组安全运行的专用设备,也越来越成为标配。通过分析振动监测设备采集到的数据,可以判断机组的运行状态,以便进行及时维护。转速是振动分析中十分重要的一个参量。由于存在转速传感器本身质量问题,或者在设备运行中发生损毁等情况,常常有转速测量缺失的情况发生。而风电机组上存在大量的振动加速度传感器,通过对振动加速度信号的处理,提取一段时间的转速,对于风电机组振动分析具有重要意义。
3.对于转速提取,现阶段的主要方法是短时傅里叶变换及短时自相关分析等方法,短时傅里叶变换存在三个缺点:一,混叠现象。频谱最高频率大于1/2采样频率时,会发生谱图重叠,影响分析;二,泄露现象,短时分析需要截取原始波形的一段,不是整周期信号,因此在不加窗函数计算时经常存在泄露现象。三,栅栏现象。频域反映了离散点上的值,如果峰值存在于离散点之间,则无法检测出此峰值;短时自相关分析主要存在噪声对计算结果有较大影响的问题。
技术实现要素:
4.本发明的目的在于提供一种提取风力机电机转速的方法,解决了现有风力机电机转速提供方法存在的上述不足;本发明通过构造辛格函数与电机原始波形进行卷积运算,滤除噪声;使用短时自相关分析,获取短时转速,从而完成从振动信号中对转速信息的提取。
5.为了达到上述目的,本发明采用的技术方案是:
6.本发明提供的一种提取风力机电机转速的方法,包括以下步骤:
7.步骤1,获取风力机发电机驱动端振动原始波形数据;
8.步骤2,利用预构造的辛格函数对得到的原始波形数据进行处理,得到滤波后的波形;
9.步骤3,将滤波后的波形以设定的步长,划分为多个长度为l的片段波形,计算每个片段波形对应的转速和时间关系;然后将所有的转速和时间关系进行整理,得到原始波形数据对应的时间-转速关系。
10.优选地,步骤2中,预构造的辛格函数具体是:
[0011][0012]
其中,g[n]为预构造的辛格函数;n为辛格函数横坐标,p为滤波上限值。
[0013]
优选地,步骤3中,计算每个片段波形对应的转速和时间关系,具体方法是:
[0014]
s31,计算每个片段波形的时延及自相关系数图;
[0015]
s32,根据得到的时延及自相关系数图,获取得到该片段波形对应的转速与时间关系。
[0016]
优选地,s31中,计算每个片段波形的时延及自相关系数,具体方法是:
[0017]
构造自相关函数,根据得到的自相关函数计算该片段波形的时延及自相关系数图。
[0018]
优选地,构造的自相关函数表达式如下:
[0019][0020]
其中,r
x,x
为自相关系数;s[n]为波形片段,长度为l;n表示第几个元素。
[0021]
优选地,s32中,根据得到的时延及自相关系数图,获取得到该片段波形对应的转速与时间关系,具体方法是:
[0022]
首先,按照风力机发电机的额定转速及切入转速,设定时延的范围值;
[0023]
然后,在获取得到的时延及自相关系数图中截取该设定的时延范围对应的片段图;在得到的片段图中选取自相关系数接近1,且取值最小的时延;
[0024]
接着,根据选取的最小时延值计算该片段对应的转速;
[0025]
最后,将该片段时间的中点定义为该片段转速对应的时间,得到该片段时间-转速关系。
[0026]
一种提取风力机电机转速的系统,包括:
[0027]
数据获取单元,用于获取风力机发电机驱动端振动原始波形数据;
[0028]
滤波单元,用于利用预构造的辛格函数对得到的原始波形数据进行处理,得到滤波后的波形;
[0029]
计算单元,用于将滤波后的波形以设定的步长,划分为多个长度为l的片段波形,计算每个片段波形对应的转速和时间关系;然后将所有的转速和时间关系进行整理,得到原始波形数据对应的时间-转速关系
[0030]
与现有技术相比,本发明的有益效果是:
[0031]
本发明提供的一种提取风力机电机转速的方法,采用预构造的辛格函数作为滤波器,以时域卷积进行滤波操作,避免了短时傅里叶变化所产生的混叠现象、泄露现象及栅栏现象;之后结合短时自相关分析,滤除了噪声的影响,极大的提高了提取转速的精确度;本发明弥补了业界通过振动信号提取短时转速不准确的问题。
附图说明
[0032]
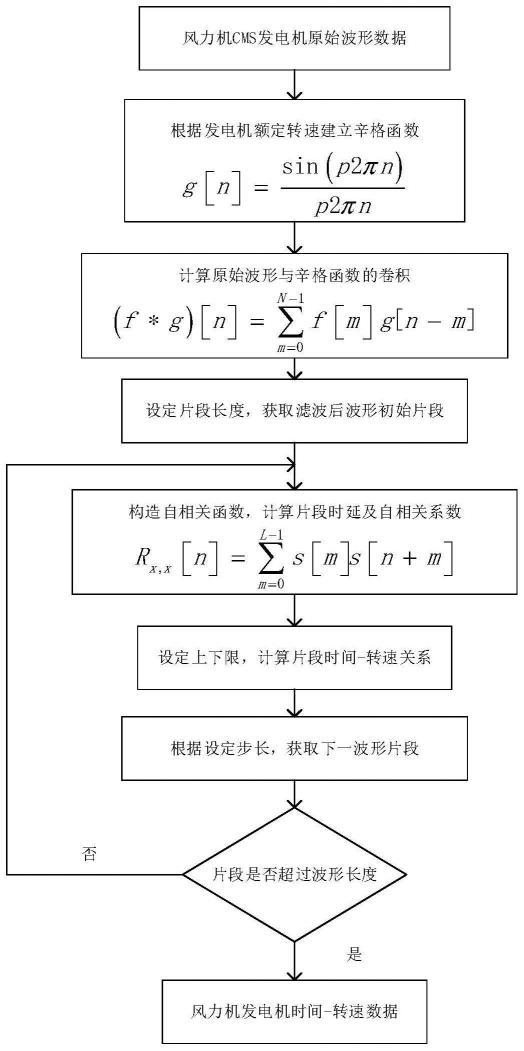
图1是本发明的流程示意图;
[0033]
图2是发电机驱动端振动原始波形;
[0034]
图3是辛格函数;
[0035]
图4是滤波后的波形图;
[0036]
图5是首个片段时延-自相关系数图;
[0037]
图6是首个片段时间-转速关系图。
具体实施方式
[0038]
下面结合附图,对本发明进一步详细说明。
[0039]
如图1所示,本发明提供的一种提取风力机电机转速的方法,包括以下步骤:
[0040]
步骤1,基于风电机组已有的cms监测系统,获取风力机发电机驱动端振动原始波形数据f[n],如图2所示;
[0041]
步骤2,根据发电机额定转速rpm
额定
,按照下式构造辛格函数,如图3所示:
[0042][0043]
其中,g[n]为预构造的辛格函数;n为辛格函数横坐标,与发电机原始波形时间t的关系为,p为滤波上限,大于发电机额定转频(rpm
额定
/60),本实施例中,设定p为rpm
额定
/60 1。
[0044]
步骤3,利用步骤2中的辛格函数对步骤1中的原始波形进行卷积处理,得到的是滤波后波形,如图4所示。
[0045]
以辛格函数为窗口,对原始波形进行卷积,实际上是在时域波形层面进行低通滤波,根据下式进行卷积计算:
[0046][0047]
其中,f[n]为原始波形,长度n;g[n]为构造的辛格函数;n表示第几个元素。
[0048]
步骤4,设定片段长度为l,获取滤波后波形初始片段(i,j),其中i表示波形第i个元素,初始为0;j表示波形第j个元素,初始为l。
[0049]
步骤5,构造自相关函数,根据得到的自相关函数计算该片段波形的时延及自相关系数图:
[0050][0051]
其中,r
x,x
为自相关系数;s[n]为波形片段,长度为l;n表示第几个元素。
[0052]
步骤6,根据步骤5计算的时延及自相关系数图,计算该片段对应的转速,并与时间进行对应,具体地:
[0053]
首先,按照风力机发电机的额定转速及切入转速,设定时延的范围值(a,b),其中,a通过额定转速计算得到;b通过切入转速计算得到;
[0054]
然后,在步骤5中获取得到的时延及自相关系数图中截取该设定的时延范围对应的片段图;在得到的片段图中选取自相关系数接近1,且取值最小的时延lag,如图5所示;
[0055]
接着,根据选取的最小时延值计算该片段对应的转速:
[0056]
rpm=fs/lag*60
[0057]
其中,rpm为该片段对应的转速;fs为原始波形的采样频率;lag为时延。
[0058]
最后,将该片段时间的中点定义为该片段转速对应的时间,得到该片段时间-转速关系,如图6所示。
[0059]
步骤7,根据设定的步长,获取下一片段。步长设定为片段长度的一半,即l/2,则下
一片段应选择(i l/2,j l/2)的片段。
[0060]
步骤8,判断该下一片段是否超过原始波形长度,如果没有超过,则继续计算片段时间-转速关系;如果超过,则停止计算,输出整体波形的时间-转速关系。
[0061]
本发明利用辛格函数构造的窗口为低通滤波器,与辛格函数进行卷积计算,即进行低通滤波;一般风力发电机的转速一般都在低频范围,大多数双馈风力发电机在30hz以下,低通滤波可以滤除高频噪声;同时利用的自相关函数,是一个信号与其自身在不同的时间点的互相关,可以找出隐含在信号中的基频的数学工具;将原始信号低通滤波后,仅剩下低频信号,其中主要的信号为发电机转速信号,根据自相关分析,可以较容易计算出该转速。
[0062]
本发明提供的一种提取风力机电机转速的系统,包括:
[0063]
数据获取单元,用于获取风力机发电机驱动端振动原始波形数据;
[0064]
滤波单元,用于利用预构造的辛格函数对得到的原始波形数据进行处理,得到滤波后的波形;
[0065]
计算单元,用于将滤波后的波形以设定的步长,划分为多个长度为l的片段波形,计算每个片段波形对应的转速和时间关系;然后将所有的转速和时间关系进行整理,得到原始波形数据对应的时间-转速关系。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。