技术特征:
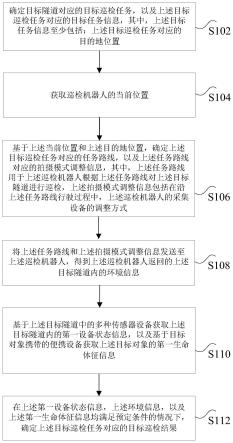
1.一种隧道巡检方法,其特征在于,包括:确定目标隧道对应的目标巡检任务,以及所述目标巡检任务对应的目标任务信息,其中,所述目标任务信息至少包括:所述目标巡检任务对应的目的地位置;获取巡检机器人的当前位置;基于所述当前位置和所述目的地位置,确定所述目标巡检任务对应的任务路线,以及所述任务路线对应的拍摄模式调整信息,其中,所述任务路线用于所述巡检机器人根据所述任务路线对所述目标隧道进行巡检,所述拍摄模式调整信息包括在沿所述任务路线行驶过程中,所述巡检机器人的采集设备的调整方式;将所述任务路线和所述拍摄模式调整信息发送至所述巡检机器人,得到所述巡检机器人返回的所述目标隧道内的环境信息;基于所述目标隧道中的多种传感器设备获取所述目标隧道内的第一设备状态信息,以及基于目标对象携带的便携设备获取所述目标对象的第一生命体征信息;在所述第一设备状态信息,所述环境信息,以及所述第一生命体征信息均满足预定条件的情况下,确定所述目标巡检任务对应的目标巡检结果。2.根据权利要求1所述的方法,其特征在于,所述基于所述当前位置和所述目的地位置,确定所述目标巡检任务对应的任务路线,包括:确定所述目的地位置和所述当前位置之间的多条通行路线,所述多条通行路线分别对应的路线长度,以及通行状况,其中,所述通行状况为可通行或不可通行;将所述多条通行路线中所述通行状况为所述可通行,并且所述路线长度最小的通行路线,作为所述任务路线。3.根据权利要求1所述的方法,其特征在于,确定所述任务路线对应的拍摄模式调整信息,包括:确定所述任务路线对应的待检测设备分布信息,其中,所述待检测设备分布信息用于指示待检测设备在所述目标隧道中的分布位置;基于所述待检测设备分布信息,确定所述任务路线对应的所述拍摄模式调整信息。4.根据权利要求3所述的方法,其特征在于,所述基于所述待检测设备分布信息,确定所述任务路线对应的所述拍摄模式调整信息,包括:基于所述待检测设备分布信息,确定所述任务路线对应的重点检测设备,以及所述重点检测设备对应的重点检测位置信息,其中,所述重点检测设备为所述待检测设备中预先设定优先级的设备;基于所述重点检测位置信息,确定所述巡检机器人沿所述任务路线行驶过程中对应的速度调节信息,拍摄角度调整信息,光圈调整信息,焦距调整信息,拍摄远近景调整信息;根据所述速度调节信息,所述拍摄角度调整信息,所述光圈调整信息,所述焦距调整信息,以及所述拍摄远近景调整信息,确定所述拍摄模式调整信息。5.根据权利要求1所述的方法,其特征在于,在所述目标任务信息包括任务类型信息的情况下,确定所述任务路线对应的拍摄模式调整信息,包括:获取所述目标巡检任务的任务类型信息;在所述任务类型信息为水位核查任务的情况下,则确定所述拍摄模式调整信息为预设拍摄模式,其中,所述预设拍摄模式至少包括:预设的固定拍摄角度。
6.根据权利要求5所述的方法,其特征在于,所述方法还包括:在所述环境信息包括积水水面高度,所述巡检机器人与积水之间的第一距离,所述预定条件至少包括预先设定的积水高度阈值,以及预先设定的距离阈值的情况下,若所述积水水面高度大于所述积水高度阈值,并且所述第一距离小于所述距离阈值,则向所述巡检机器人发送暂停行驶信号,控制所述巡检机器人结束所述目标巡检任务。7.根据权利要求1所述的方法,其特征在于,所述方法还包括:若所述第一设备状态信息,所述第一生命体征信息,以及所述环境信息中任意一个未满足所述预定条件,则基于所述第一设备状态信息,所述第一生命体征信息,以及所述环境信息中未满足所述预定条件的信息,确定第一巡检任务;确定所述第一巡检任务对应的第一优先级,以及所述目标巡检任务对应的第二优先级;判断所述第一优先级是否大于所述第二优先级;若所述第一优先级大于所述第二优先级,则向所述巡检机器人发送第一控制信号,以及所述第一巡检任务对应的第一任务信息,其中,所述第一控制信号用于指示所述巡检机器人暂停执行所述目标巡检任务,执行所述第一巡检任务;在接收到所述巡检机器人返回的所述第一巡检任务对应的第一巡检结果之后,向所述巡检机器人发送第二控制信号,其中,所述第二控制信号用于指示所述巡检机器人继续执行所述目标巡检任务。8.根据权利要求1所述的方法,其特征在于,所述确定目标隧道对应的目标巡检任务,以及所述目标巡检任务对应的目标任务信息,包括:获取所述目标隧道中的多种传感器设备获取所述目标隧道内的第二设备状态信息,以及基于所述目标对象携带的便携设备获取所述目标对象的第二生命体征信息;判断所述第二设备状态信息和所述第二生命体征信息是否均满足所述预定条件;若所述第二设备状态信息和所述第二生命体征信息均满足所述预定条件,则获取预先设定的日常巡检任务对应的日常任务信息;将所述日常巡检任务作为所述目标巡检任务,以及将所述日常任务信息作为所述目标任务信息;若所述第二设备状态信息和所述第二生命体征信息中的任意一个未满足所述预定条件,则基于所述第二设备状态信息和所述第二生命体征信息中未满足所述预定条件的信息,确定所述目标巡检任务,以及所述目标巡检任务对应的所述目标任务信息。9.根据权利要求1中任意一项所述的方法,其特征在于,所述第一设备状态信息至少包括:线路温度信号,水位信号,线路负荷信号,所述第一生命体征信息至少包括心率信号,所述环境信息至少包括:隧道内预设类型气体的浓度,以及隧道内温度。10.一种隧道巡检方法,其特征在于,包括:获取对目标隧道进行巡检的任务路线,以及所述任务路线对应的拍摄模式调整信息,其中,所述任务路线是监控平台确定所述目标隧道对应的目标巡检任务,所述目标巡检任务对应的目的地位置,以及获取巡检机器人的当前位置,基于所述当前位置和所述目的地位置确定得到的;根据所述任务路线和所述拍摄模式调整信息对所述目标隧道进行巡检,得到所述目标
隧道内的环境信息,并将所述环境信息发送至所述监控平台;在所述监控平台确定所述环境信息,所述目标隧道内的第一设备状态信息,以及目标对象的第一生命体征信息均满足预定条件的情况下,到达所述目的地位置,其中,所述第一设备状态信息是基于所述目标隧道中的多种传感器设备获取到的,所述第一生命体征信息是基于所述目标对象携带的便携设备获取到的;在所述目的地位置,得到与所述目标巡检任务对应的目标巡检结果,将所述目标巡检结果发送至所述监控平台。11.根据权利要求10所述的方法,其特征在于,所述方法还包括:获取所述巡检机器人在运行轨道上分布的定位码;基于所述定位码,采用射频识别方法,确定所述定位码对应的预设位置信息;采用所述预设位置信息,确定所述巡检机器人的所述当前位置。12.一种隧道巡检方法,其特征在于,包括:监控平台确定目标隧道对应的目标巡检任务,以及所述目标巡检任务对应的目标任务信息,其中,所述目标任务信息至少包括:所述目标巡检任务对应的目的地位置;巡检机器人获取当前位置,并将所述当前位置发送至所述监控平台;所述监控平台基于所述当前位置和所述目的地位置,确定所述目标巡检任务对应的任务路线,以及所述任务路线对应的拍摄模式调整信息,将所述任务路线和所述拍摄模式调整信息发送至所述巡检机器人,其中,所述拍摄模式调整信息包括在沿所述任务路线行驶过程中,所述巡检机器人的采集设备的调整方式;所述巡检机器人根据所述任务路线和所述拍摄模式调整信息对所述目标隧道进行巡检,得到所述目标隧道内的环境信息;所述监控平台获取所述目标隧道内的第一设备状态信息,所述环境信息,以及目标对象的第一生命体征信息,其中,所述第一设备状态信息是基于所述目标隧道中的多种传感器设备获取到的,所述第一生命体征信息是基于所述目标对象携带的便携设备获取到的;在所述监控平台确定所述环境信息,所述第一设备状态信息,以及所述第一生命体征信息均满足预定条件的情况下,所述巡检机器人到达所述目的地位置;在所述目的地位置,所述巡检机器人得到与所述目标巡检任务对应的目标巡检结果,将所述目标巡检结果发送至所述监控平台。13.一种隧道巡检装置,其特征在于,包括:第一确定模块,用于确定目标隧道对应的目标巡检任务,以及所述目标巡检任务对应的目的地位置;第一获取模块,用于获取巡检机器人的当前位置;第二确定模块,用于基于所述当前位置和所述目的地位置,确定所述目标巡检任务对应的任务路线,以及所述任务路线对应的拍摄模式调整信息,其中,所述任务路线用于所述巡检机器人根据所述任务路线对所述目标隧道进行巡检,所述拍摄模式调整信息包括在沿所述任务路线行驶过程中,所述巡检机器人的采集设备的调整方式;第二获取模块,用于将所述任务路线和所述拍摄模式调整信息发送至所述巡检机器人,得到所述巡检机器人返回的所述目标隧道内的环境信息;第三获取模块,用于基于所述目标隧道中的多种传感器设备获取所述目标隧道内的第
一设备状态信息,以及基于目标对象携带的便携设备获取所述目标对象的第一生命体征信息;第三确定模块,用于在所述第一设备状态信息,所述环境信息,以及所述第一生命体征信息均满足预定条件的情况下,确定所述目标巡检任务对应的目标巡检结果。
技术总结
本发明公开了一种隧道巡检方法以及装置。其中,该方法包括:确定目标隧道对应的目标巡检任务,以及目标巡检任务对应的目的地位置;获取巡检机器人的当前位置;基于当前位置和目的地位置,确定目标巡检任务对应的任务路线,以及任务路线对应的拍摄模式调整信息;将任务路线和拍摄模式调整信息发送至巡检机器人,得到巡检机器人返回的目标隧道内的环境信息;获取目标隧道内的第一设备状态信息,以及获取目标对象的第一生命体征信息;在第一设备状态信息,环境信息,以及第一生命体征信息均满足预定条件的情况下,确定目标巡检任务对应的目标巡检结果。本发明解决了相关技术中存在的巡检机器人的巡检方式单一,导致的巡检效率低,巡检局限性高的技术问题。检局限性高的技术问题。检局限性高的技术问题。
技术研发人员:赵明 李哲 李佩哲 钟鸣 李宁 赵洋 刘青 熊益多 程金海 孙冬梅
受保护的技术使用者:国家电网有限公司 康威通信技术股份有限公司
技术研发日:2022.10.20
技术公布日:2023/1/31
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。