技术特征:
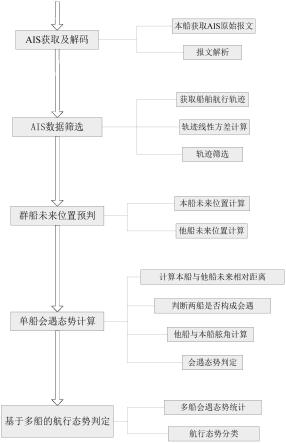
1.一种基于ais的船舶航行态势分类方法,其特征在于,包括以下步骤:s1、ais原始报文获取及解码:本船利用船载ais系统获取本船和他船的ais原始报文,通过对ais原始报文解码得到本船和他船的船舶位置信息、航行动态参数和航行静态参数;s2、ais数据筛选:对一段时间内获取的本船和他船的船舶位置信息、航行动态参数和航行静态参数进行分析,计算船舶航行轨迹线性方差的大小;若船舶航行轨迹线性方差在预设范围内,则判断船舶为直线航行,保留船舶航行轨迹及对应船舶,否则去除船舶航行轨迹及对应的船舶;s3、群船未来位置预判:对直线航行的所有船舶进行分析,根据各船最新的ais原始报文,提取出经纬度、航速、航向,在时间序列上按照特定的时间间隔向前计算未来一段时间内船舶的多个位置点;s4、单船会遇态势计算:根据计算出来的未来一段时间内船舶的多个位置点,计算未来一段时间内本船与周围一定范围内其它各船之间的相对距离,判断相对距离是否小于一定的阈值从而构成会遇局面,并根据两船的位置和各自航向,判断两船形成的会遇态势类型;s5、基于多船的航行态势判定:计算未来一段时间内所有与本船构成会遇的船舶与本船的会遇态势,然后统计各种会遇态势的船舶的数量和比率,进而根据数量和比率对本船航行态势进行分类。2.根据权利要求1所述的基于ais的船舶航行态势分类方法,其特征在于,所述的s1中,在收到ais原始报文后,对长短不一的报文进行拼包处理,然后从中解析出以“!aivdm”和“!aivdo”开头的完整的ais报文数据;其中以“!aivdm”开头的是周围其他船舶的ais,以“!aivdo”开头的是本船的ais;对以“!aivdm”和“!aivdo”开头的暗码报文进行解析。3.根据权利要求1所述的基于ais的船舶航行态势分类方法,其特征在于,所述的s2具体包括:获取船舶航行轨迹,即通过记录本船和他船一段时间的不同位置的经纬度坐标,从而得到船舶位置和时间的二维关系曲线,作为船舶航行轨迹;轨迹线性方差计算,即分别对每条船舶航行轨迹的经纬度坐标进行微积分计算,分别得到每条船舶航行轨迹的经度和纬度的变化均值,然后再分别计算每条船舶航行轨迹的经度和纬度变化方差的大小;轨迹筛选,即根据每条船舶航行轨迹的经度和纬度变化方差的大小,判断船舶的航行轨迹是否具有线性规律,若某船经度或纬度变化方差大于分别预设的特定阈值,则去除船舶航行轨迹及对应的船舶。4.根据权利要求1所述的基于ais的船舶航行态势分类方法,其特征在于,所述s4中,一定的阈值为预设值,满足《国际海上避碰规则》的要求。5.根据权利要求1所述的基于ais的船舶航行态势分类方法,其特征在于,所述s4中,判断两船形成的会遇态势类型,具体包括:计算他船相对本船的舷角;然后根据本船的航向角、他船的航向角及他船相对本船的舷角,按照《国际海上避碰规则》,分为对遇、交叉、追越三种会遇态势。
6.根据权利要求5所述的基于ais的船舶航行态势分类方法,其特征在于,根据本船与他船的航向角之差是否大于180
°
,对所述对遇进行进一步划分为对向对遇和其他会遇态势。7.根据权利要求5所述的基于ais的船舶航行态势分类方法,其特征在于,根据本船与他船的航向角之差是否小于180
°
,对所述的追越进行进一步划分为同向追越和其他会遇态势。8.根据权利要求1所述的基于ais的船舶航行态势分类方法,其特征在于,所述的s5具体按以下公式判定最终的航行态势:其中,t(s,r
x
,r
y
,r
z
)为航行态势判定函数;s为与本船会遇船舶总数;n为会遇船舶总数较小阈值;r
x
为对遇会遇态势对应的比率,即对遇会遇态势对应会遇态势的船舶数量占s的百分比;r
y
为交叉会遇态势对应的比率;r
z
为追越会遇态势对应的比率;m为会遇船舶总数较大阈值;a,b分别为会遇态势对应的比率的大阈值和小阈值。9.一种基于ais的船舶航行态势分类系统,其特征在于:本系统包括:信号采集端,用于从船载ais系统获取本船和他船的ais原始报文;信号传输端,用于传输信号采集端采集的ais原始报文;数据处理器,用于从信号传输端接收所述的ais原始报文,并执行以实现权利要求1至8中任意一项所述的基于ais的船舶航行态势分类方法的步骤。10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于:所述计算机程序被数据处理器执行时实现权利要求1至8中任意一项所述的基于ais的船舶航行态势分类方法的步骤。
技术总结
本发明公开了一种基于AIS的船舶航行态势分类方法及系统,本船利用船载AIS系统获取本船和他船的AIS原始报文,解码得到本船和他船的船舶位置信息、航行动态参数和航行静态参数;计算船舶航行轨迹线性方差的大小;若船舶航行轨迹线性方差在预设范围内,则判断船舶为直线航行,保留船舶航行轨迹及对应船舶;对直线航行的所有船舶进行分析,根据各船最新的AIS原始报文,提取出经纬度、航速、航向,在时间序列上按照特定的时间间隔向前计算未来一段时间内船舶的多个位置点;根据位置点进行单船会遇态势计算,然后基于多船的数据进行本船总体的航行态势判定,最终提高船舶的航行环境态势的智能感知能力。势的智能感知能力。势的智能感知能力。
技术研发人员:耿佳东 谭中慧
受保护的技术使用者:中远海运能源运输股份有限公司
技术研发日:2022.10.28
技术公布日:2023/1/31
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。