技术特征:
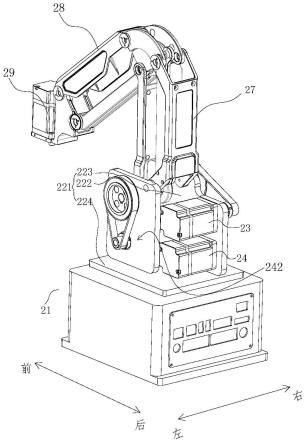
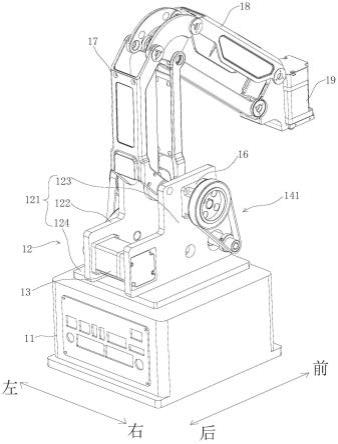
1.一种轻量级工业桌面机械臂的动力组件,其特征在于,包括大臂驱动电机、小臂驱动电机、大臂减速器、小臂减速器、大臂同步带轮组件、小臂同步带轮组件以及小臂二级同步带轮组件;所述大臂减速器和所述大臂驱动电机通过所述大臂同步带轮组件传动连接,并以所述大臂减速器传动连接于桌面机械臂的大臂;所述小臂减速器分别连接于所述小臂同步带轮组件和所述小臂二级同步带轮组件,以所述小臂同步带轮组件传动连接于所述小臂驱动电机,并以所述小臂二级同步带轮组件传动连接于所述桌面机械臂的小臂;其中,所述大臂同步带轮组件、所述小臂同步带轮组件以及所述小臂二级同步带轮组件的减速比均大于1。2.如权利要求1所述的动力组件,其特征在于,所述大臂同步带轮组件包括大臂同步带主动轮、大臂同步带和大臂同步带从动轮,所述大臂同步带主动轮安装在所述大臂驱动电机的输出轴,所述大臂同步带一端套在所述大臂同步带主动轮外,所述大臂同步带另一端套在所述大臂同步带从动轮外,以所述大臂同步带在所述大臂同步带主动轮与所述大臂同步带从动轮之间建立同步传动;以及/或者,所述小臂同步带轮组件包括小臂同步带主动轮、小臂同步带以及小臂同步带从动轮,所述小臂同步带主动轮安装在所述小臂驱动电机的输出轴,所述小臂同步带一端套在所述小臂同步带主动轮外,所述小臂同步带另一端套在所述小臂同步带从动轮外,以所述小臂同步带在所述小臂同步带主动轮与所述小臂同步带从动轮之间建立同步传动;以及/或者,所述小臂二级同步带轮组件包括小臂二级同步带主动轮、小臂二级同步带以及小臂二级同步带从动轮,所述小臂二级同步带主动轮安装在所述小臂减速器的输出轴,所述小臂二级同步带一端套在所述小臂二级同步带主动轮外,所述小臂二级同步带另一端套在所述小臂二级同步带从动轮外,以所述小臂二级同步带在所述小臂二级同步带主动轮与所述小臂二级同步带从动轮之间建立同步传动。3.如权利要求2所述的动力组件,其特征在于,所述大臂同步带从动轮包括大臂内轴连部,以所述大臂内轴连部传动连接于所述大臂减速器,并以所述大臂减速器传动连接于所述大臂;以及/或者,所述小臂同步带从动轮还具有小臂内轴连部,以所述小臂内轴连部传动连接于所述小臂减速器;以及/或者,所述小臂二级同步带从动轮还具有小臂二级内轴连部,以所述小臂二级内轴连部传动连接于小臂驱动轴,所述小臂驱动轴传动连接于所述小臂。4.如权利要求1-3任一项所述的动力组件,其特征在于,所述大臂减速器的减速比在3-25之间,所述大臂同步带轮组件的减速比在1.5-6之间;以及/或者,所述小臂减速器的减速比在3-25之间,所述小臂同步带轮组件的减速比在1.5-6之间,所述小臂二级同步带轮组件的减速比在1.5-6之间。5.如权利要求1-3任一项所述的动力组件,其特征在于,所述大臂减速器的减速比在5-15之间,所述大臂同步带轮组件的减速比在3-5之间;以及/或者,
所述小臂减速器的减速比在5-15之间,所述小臂同步带轮组件的减速比在3-5之间,所述小臂二级同步带轮组件的减速比在3-5之间。6.如权利要求1-3任一项所述的动力组件,其特征在于,所述大臂减速器的减速比在5-10之间,所述大臂同步带轮组件的减速比在3-5之间;以及/或者,所述小臂减速器的减速比在5-10之间,所述小臂同步带轮组件的减速比在3-5之间,所述小臂二级同步带轮组件的减速比在3-5之间。7.如权利要求2所述的动力组件,其特征在于,所述动力组件还具有大臂二级同步带轮组件,所述大臂二级同步带轮组件包括大臂二级同步带主动轮、大臂二级同步带以及大臂二级同步带从动轮,所述大臂二级同步带主动轮与所述大臂同步带轮组件的大臂同步带从动轮同轴连接,所述大臂二级同步带一端套在所述大臂二级同步带主动轮外,所述大臂二级同步带另一端套在所述大臂二级同步带从动轮外,所述大臂二级同步带从动轮连接于所述大臂减速器的输入轴;其中,所述大臂二级同步带轮组件的减速比大于1。8.一种轻量级工业桌面机械臂的驱动装置,其特征在于,包括如权利要求1至7任一项所述的轻量级工业桌面机械臂的动力组件;所述驱动装置还包括:底座;以及,转台,所述转台可转动地装配于所述底座;所述转台包括基座,所述基座用于安装所述轻量级工业桌面机械臂的动力组件。9.如权利要求8所述的驱动装置,其特征在于,所述转台包括第一侧板、第二侧板以及底板,所述第一侧板与所述第二侧板相互间隔设置于所述底板。10.如权利要求9所述的驱动装置,其特征在于,所述第一侧板设有用于安装所述大臂驱动电机和所述小臂驱动电机的两个安装座,两个所述安装座上下错开或前后错开。11.如权利要求9所述的驱动装置,其特征在于,所述第一侧板包括第一驱动轴孔,所述第一驱动轴孔位于所述第一侧板远离所述底板的一侧;所述第二侧板包括第二驱动轴孔,所述第二驱动轴孔位于所述第二侧板远离所述底板的一侧。12.如权利要求9-11任一项所述的驱动装置,其特征在于,所述大臂驱动电机和所述小臂驱动电机分别布置于所述基座前后两侧,且所述大臂驱动电机和所述小臂驱动电机水平布置;或者,所述大臂驱动电机和所述小臂驱动电机均布置于所述基座的前侧或者后侧,且所述大臂驱动电机和所述小臂驱动电机上下叠置。13.如权利要求12所述的驱动装置,其特征在于,所述大臂驱动电机与所述小臂驱动电机的输出端均朝向所述第二侧板,所述大臂同步带轮组件和所述小臂同步带轮组件均位于所述第二侧板背向所述第一侧板的一侧,所述小臂二级同步带轮组件位于所述第一侧板背向所述第二侧板的一侧。14.如权利要求9-11任一项所述的驱动装置,其特征在于,还具有大臂二级同步带轮组件,所述大臂同步带轮组件与所述大臂二级同步带轮组件同时位于所述第二侧板背向所述第一侧板的一侧。15.一种轻量级工业桌面机械臂,其特征在于,包括如权利要求8-14任一项所述的轻量
级工业桌面机械臂的驱动装置。16.如权利要求15所述的轻量级工业桌面机械臂,其特征在于,还包括与所述驱动装置的基座枢接的大臂,以及与大臂另一端枢接的小臂,以及与所述小臂连接的末端执行器,所述大臂与所述小臂配置为平行四边形组合臂架。17.一种机器人,其特征在于,包括如权利要求15或16所述的轻量级工业桌面机械臂。
技术总结
涉及轻量级工业桌面机械臂技术领域,本申请提供了一种动力组件、驱动装置、轻量级工业桌面机械臂以及机器人,动力组件包括大臂驱动电机、小臂驱动电机、大臂减速器、小臂减速器、大臂同步带轮组件、小臂同步带轮组件以及小臂二级同步带轮组件;大臂减速器和大臂驱动电机通过大臂同步带轮组件传动连接,并以大臂减速器传动连接于桌面机械臂的大臂;小臂减速器分别连接于小臂同步带轮组件和小臂二级同步带轮组件,以小臂同步带轮组件传动连接于小臂驱动电机,并以小臂二级同步带轮组件传动连接于桌面机械臂的小臂;所有同步带轮组件的减速比均大于1。以解决轻量级工业桌面机械臂负载能力不足的问题,让桌面机械臂获得更优的性能。让桌面机械臂获得更优的性能。让桌面机械臂获得更优的性能。
技术研发人员:叶伟智 姜宇 郎需林
受保护的技术使用者:深圳市越疆科技有限公司
技术研发日:2022.08.11
技术公布日:2022/12/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。