1.本实用新型属于环卫设备技术领域,具体涉及一种清淤机器人。
背景技术:
2.城市中的排水管网系统阡陌交错,错综复杂。排水管网如果出现淤泥堵塞,就会导致排水不畅,影响整个城市的排水使用。排水管道的清淤疏通工作已经成为亟需解决的问题。
3.目前,现有技术中已有出现利用清淤机器人下井清理排水管道,但是由于井深较长,井内空间狭窄,清淤机器人下井和出井较为困难;而且,正是因为井内空间狭窄,通过人眼不能有效观察到井内清淤前后的状况。
技术实现要素:
4.实用新型目的:为了解决上述问题,本实用新型提供了一种清淤机器人。
5.技术方案:一种清淤机器人,包括:底座,连接于所述底座的吸淤机构,还包括:声呐组件,至少包括第一声呐,以及第二声呐;所述第一声呐倾斜安装于所述吸淤机构的输入端顶部;所述第二声呐倾斜设于底座末端;
6.第一起吊组件,设于所述底座首端;所述第一起吊组件包括:至少两组安装于所述底座首端上的固定部,以及活动连接于所述固定部的前起吊部;
7.第二起吊组件,设于所述底座末端;所述第二起吊组件包括:设于所述底座末端的安装部,至少两组安装于所述安装部上的旋转部,设于所述旋转部上方的磁力部,以及活动连接于所述旋转部的后起吊部。
8.在进一步的实施例中,所述固定部为吊环螺钉,所述前起吊部为前起吊环,所述前起吊环两端折弯形成折弯部,所述折弯部与吊环螺钉通过扣环连接。
9.通过采用上述技术方案,实现前起吊环姿态可活动调整。
10.在进一步的实施例中,所述安装部通过多组螺杆固定在所述底座末端,所述安装部为起吊固定板;所述旋转部为旋转支架;所述后起吊部为后起吊环,所述后起吊环端部通过销轴与旋转支架连接;所述磁力部为磁铁。
11.通过采用上述技术方案,在无其他外力的作用下,磁体与后起吊环之间的吸引力,使得后起吊环处于竖直状态;有其他外力的作用下,后起吊环的姿态可活动调整。
12.在进一步的实施例中,所述吸淤机构包括:吸污管,内设于所述底座;所述吸污管一端连通有渣浆泵;所述吸污管为软管;壳体,连通于所述吸污管的另一端;所述壳体铰接于底座;所述壳体内部中空,且具有输入端和输出端;所述壳体靠近输入端的侧壁上分别开设有两组导向槽;所述壳体上设有第一调节组件;挡板,设于所述输入端;所述挡板活动连接于所述壳体;所述挡板上设有若干组镂空部;所述挡板顶部设有第二调节组件;两组引导组件,设于所述壳体两侧且连接于所述挡板。
13.通过采用上述技术方案,渣浆泵为吸污管提供吸力,使吸污管吸入淤泥,最后淤泥
经过抽污管、淤泥传输管道传输至岸上的淤泥收集器。
14.在进一步的实施例中,所述第一调节组件包括:两组阵列设于所述壳体外壁的支座,对应连接于所述支座的第一连接块,两端对应铰接于所述第一连接块的第一转轴,以及连接于所述第一转轴的第一伸缩杆。
15.通过采用上述技术方案,第一伸缩杆伸缩时,带动第一转轴远离或靠近底座,壳体与底座铰接,壳体会因为第一转轴、第一连接块以及支座,轻微向下或向上摆动,进而实现对壳体的角度调整。
16.在进一步的实施例中,所述第二调节组件包括:两组设于所述挡板顶部的连接支架,对应连接于所述连接支架的第二连接块,两端对应铰接于所述第二连接块的第二转轴,以及连接于所述第二转轴的第二伸缩杆。
17.通过采用上述技术方案,第二伸缩杆伸缩时,带动第二转轴远离或靠近底座,进而通过第二连接块和连接支架带动挡板在沿着滑槽长度方向上滑动,挡板远离或靠近壳体。
18.在进一步的实施例中,所述引导组件包括:滑动连接于所述导向槽的滑块,连接于所述滑块的导向轴,以及设于所述壳体外壁上且套接于所述导向轴的导杆支架;所述滑块与挡板侧壁连接。
19.通过采用上述技术方案,在挡板运动时,滑块沿着滑槽运动,进而带动导向轴在导杆支架内滑动,导向组件对挡板运动起到导向的作用。
20.在进一步的实施例中,所述底座两侧对应设置有履带行走组件。
21.通过采用上述技术方案,清淤机器人的行走动力通过履带行走组件实现。
22.有益效果:在清淤机器人工作前后测量其前后端的物质的高度,并将高度数据反馈至相应的手机软件中,对井内清淤前后的状况进行比较,用于评价清淤机器人的工作效果;当下井或出井时,前起到环和后起吊环姿态转动,后起吊环近似与清淤机器人平行,使清淤机器人保持近似竖直状态,减少清淤机器人下井或出井时的横向尺寸,顺利下降或上升。
附图说明
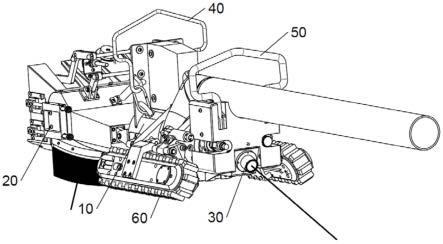
23.图1是本实用新型的结构示意图。
24.图2是本实用新型的结构示意图。
25.图3是本实用新型的结构示意图。
26.图4是本实用新型的结构示意图。
27.图1至图4中各标注为:底座10、吸淤机构20、吸污管21、渣浆泵22、抽污管221、壳体23、导向槽24、第一调节组件25、支座251、第一连接块252、第一转轴253、第一伸缩杆254、挡板26、第二调节组件27、连接支架271、第二连接块272、第二转轴273、第二伸缩杆274、引导组件28、滑块281、导向轴282、导杆支架283、声呐组件30、第一声呐31、第二声呐32、第一起吊组件40、固定部41、前起吊部42、扣环43、第二起吊组件50、安装部51、旋转部52、磁力部53、后起吊部54、履带行走组件60。
具体实施方式
28.实施例1
29.本实施例提供了一种清淤机器人,包括:底座10,吸淤机构20,声呐组件30,第一起吊组件40以及第二起吊组件50。声呐组件30包括第一声呐31和第二声呐32,第一声呐31倾斜安装在吸淤机构20的输入端顶部,第二声呐32倾斜安装在底座10末端。第一声呐31、第二声呐32的型号均为宇征4号-1mhz-24vdc。第一声呐31和第二声呐32用于测量距离。当淤泥机器人下落至井底时,第一声呐31和第二声呐32向井内的液体或者固态淤泥发出超声波信号,超声波信号达到液体或固态淤泥后折回,由探头接收,测量超声波发射到接收的时间差,从而实现距离的测量。测量的距离满足以下公式:,其中,l:超声波探头距所测料面距离。单位:m;v:经温度补偿后的声速值。单位:m/s;t:测量范围内声波的运行时间。单位:s。实际需求为需要测量井内各个物质的高度,但由于井内狭窄,如果将第一声呐31和第二声呐32竖直安装,则会增加淤泥机器人的体积,影响淤泥机器人的其他功能,所以将第一声呐31和第二声呐32倾斜设置,设定第一声呐31发射的超声波线与竖直方向的夹角(锐角)为θ1,第二声呐32发射的超声波线与竖直方向的夹角(锐角)为θ2。那么,清淤机器人前方物质的高度h1=cosθ1*l1,清淤机器人后方物质的高度为h2=cosθ2*l2,其中,l1为第一声呐31测量的距离,l2为第二声呐32测量的距离。在清淤机器人工作前测量并汇总h1、h2,在清淤机器人工作后测量并汇总h1’
、h2’
,将上述数据反馈至相应的手机软件(app)中,对井内清淤前后的状况进行比较,用于评价清淤机器人的工作效果。
30.第一起吊组件40安装在底座10首端,第一起吊组件40包括:安装在底座10首端上的固定部41,以及与固定部41活动连接的前起吊部42。固定部41为吊环螺钉,吊环螺钉固定在底座10上。吊环螺钉为两组,分别安装在底座10的两侧。前起吊部42为前起吊环,前起吊环两端折弯形成折弯部,折弯部对应与吊环螺钉通过扣环43连接。第二起吊组件50安装在底座10末端。第二起吊组件50包括:安装在底座10末端的安装部51,安装在安装部51上的两组旋转部52,固定在旋转部52上方的磁力部53,以及与旋转部52活动连接的后起吊部54。安装部51通过多组螺杆固定在底座10末端,安装部51为起吊固定板。旋转部52为旋转支架;旋转支架阵列安装在起吊固定板上。后起吊部54为后起吊环,后起吊环材质采用如含铁材料。后起吊环端部通过销轴与旋转支架连接;磁力部53为磁铁。磁铁固定在旋转支架的上方,磁铁位置与部分长度的后起吊环正对,使得磁体与后起吊环之间有吸引力。在无其他外力的作用下,磁体与后起吊环之间的吸引力,使得后起吊环处于竖直状态。当下井时,由于竖直井道细长狭窄,使用绳子等物品拴住前起吊环和后起吊环,前起到环和后起吊环姿态转动,后起吊环近似与清淤机器人平行,将清淤机器人竖直放入井道中,减少清淤机器人下井时的横向尺寸,顺利下降;在底座10首尾两端分别设置第一起吊组件40和第二起吊组件50,保持清淤机器人受力稳定,平稳下降,避免与井壁的碰撞。当出井时,同样,将清淤机器人逐步倾斜使得竖直出井。当清淤机器人在井内需要工作时,接触绳子对前起吊环和后起吊环的作用力,后起吊环因为磁力保持竖直,不会影响清淤机器人其他机构工作。
31.吸淤机构20包括:吸污管21,渣浆泵22,壳体23,第一调节组件25,挡板26,第二角度调节组件,以及两组引导组件28。吸污管21安装在底座10内部,吸污管21为软管。吸污管21一端与渣浆泵22连通。渣浆泵22配备有抽污管221。渣浆泵22外接液压动力站为渣浆泵22提供动能,渣浆泵22为吸污管21提供吸力,使吸污管21吸入淤泥,最后淤泥经过抽污管221、淤泥传输管道传输至岸上的淤泥收集器。壳体23与吸污管21的另一端连通,壳体23与底座
10铰接。壳体23内部中空,壳体23具有输入端和输出端。壳体23即相当于吸淤口,淤泥从壳体23输入端进入,从输出端进入吸污管21内。壳体23靠近输入端的侧壁上分别开设有两组导向槽24;壳体23上设有第一调节组件25,第一调节组件25用于调节壳体23的角度。挡板26,安装在输入端;挡板26与壳体23活动连接。挡板26上开设有若干组镂空部,淤泥从镂空部输入。挡板26顶部设有第二调节组件27,第二调节组件27用于调节挡板26的位置。引导组件28设于所述壳体23两侧且与挡板26连接。清淤机器人自身包括有主体控制器,用于控制清淤机器人。
32.第一调节组件25包括:两组阵列安装在壳体23外壁的支座251,对应与支座251连接的第一连接块252,两端对应与第一连接块252铰接的第一转轴253,以及与第一转轴253连接的第一伸缩杆254。第一伸缩杆254安装在底座10上方。第一伸缩杆254为电动伸缩杆。第一伸缩杆254伸缩时,带动第一转轴253远离或靠近底座10,壳体23与底座10铰接,壳体23会因为第一转轴253、第一连接块252以及支座251,轻微向下或向上摆动,进而实现对壳体23的角度调整。第二调节组件27包括:两组安装在挡板26顶部的连接支架271,对应与挡板26之间里连接的第二连接块272,两端对应与第二连接块272铰接的第二转轴273,以及与第二转轴273连接的第二伸缩杆274。第二伸缩杆274安装第一伸缩杆254上方。第二伸缩杆274为电动伸缩杆。引导组件28包括:与导向槽24滑动连接的滑块281,与滑块281固定连接的导向轴282,安装在壳体23外壁上且套接在导向轴282的导杆支架283;滑块281与挡板26侧壁固定连接。第二伸缩杆274伸缩时,带动第二转轴273远离或靠近底座10,进而通过第二连接块272和连接支架271带动挡板26在沿着滑槽长度方向上滑动,挡板26远离或靠近壳体23。在挡板26运动时,滑块281沿着滑槽运动,进而带动导向轴282在导杆支架283内滑动,导向组件对挡板26运动起到导向的作用。
33.底座10两侧对应设置有履带行走组件60。清淤机器人的行走动力通过履带行走组件60实现,履带行走组件60包括履带行走轮,通过内部电机配减速机实现清淤机器人整体前后左右行走。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。